/*
Water Heater Thermostat is a device that controls any kind of pump in a solar system
or in a classical boiler
The operating principle is as follows:
- a DS18B20 probe at the heat source compares the temperature with a
second DS18B20 probe placed in hot water tank.
- beyond a deltaTon threshold the pump is started, stops below deltaToff
- pump starts when Tmini freezes
- an alarm system reports the Tmaxi temperature exceedance
- the thresholds - deltaTon, deltaToff, Tmaxi and Tmini - as well as the pump model are
configurable and backed up without power
- support of the PWM control for externally controlled pumps.
Following the measurements made on the Steca TR 503 regulator, the PWM signal has the
the following characteristics:
- 250Hz with variable cyclic ratio from 0 (stop) to 100% (total pump operation) under 10V,
- the pump is continuously supplied by the 230V,
- 50% at start-up, the ratio gradually increases to 100%,
- when Tcumulus reaches deltaTpwm, the cyclic ratio may decrease down to 25%.
The programme provides for:
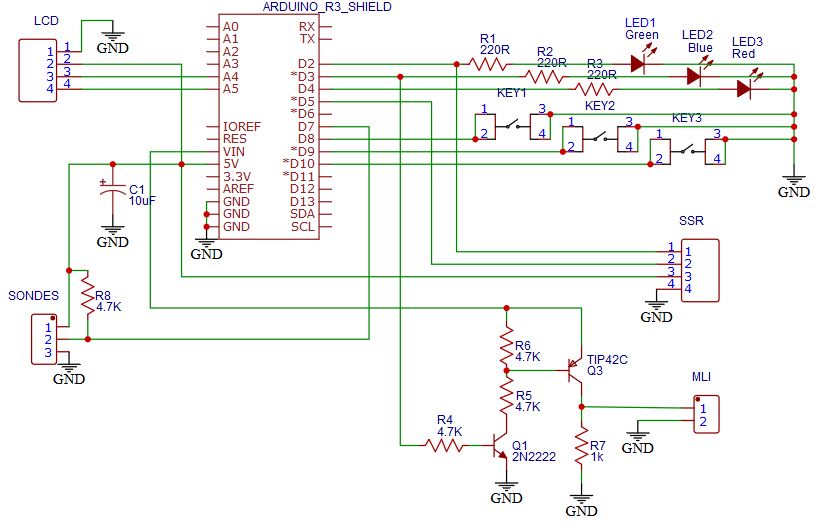
- 1 Arduino Uno R3
- 2 DS18B20 temperature sensor
- 1 resistor of 4.7k between data bus and +5V of DS18B20 sensors
- 1 SRG
- 1 16x2 LCD display for Arduino with I2C extension for serial mode,
- 3 push buttons
_________________________________________________________________
| |
| author : Philippe de Craene <dcphilippe@yahoo.fr> |
| any feedback is welcome |
_________________________________________________________________
Hardware pinup:
---------------
numeric output 2 => SSR = logic I active SSR drive
numeric output 3 => PWM = drives the 250Hz PWM signal, output 3 required for Timer2
numeric output 4 => ALARM = red LED
numeric output 5 => SSR_INV = logic 0 active SSR drive
numeric output 7 => DS18B20 = 1-Wire data bus for DS18B20
numeric output 8 => ENTRY = push-button
numeric output 9 => PLUS = push-button
numeric output 10 => MINUS = bouton poussoir
analog input A4 => SDA for display
analog input A5 => SCL for display
Versions history:
-----------------
version 1 - 18 aot 2018 - transformation pour sondes numriques et le LCD avec I2C
version 1.11 - 20 aot 2018 - correction + optimisation
version 1.2 - 28 aot 2018 - corrections de bugs
version 1.3 - 25 nov. 2018 - adaptation pour SSR actif LOW
version 1.4 - 20 mai 2019 - mise jour des liens pour tlcharger les bibliothques
version 1.41 - 22 aout 2019 - mises jour diverses
version 2.0 - 5 april 2020 - update for boiler driven by SSR + ALARM management + English translation
*/
#include <EEPROM.h>
#include <Wire.h>
#include <OneWire.h> // https://github.com/PaulStoffregen/OneWire
#include <LiquidCrystal_I2C.h> // https://github.com/fdebrabander/Arduino-LiquidCrystal-I2C-library
// Inputs/outputs:
// A4 => SDA for display
// A5 => SCL for display
const byte ENTRYpin = 8; // 3 push-buttons
const byte MINUSpin = 9;
const byte PLUSpin = 10;
const byte DS18B20 = 7; // 1-Wire data for DS18B20
const byte SSRpin = 2; // SSR drive + yellow LED
const byte SSR_INVpin = 5; // inverted SSR drive
const byte PWMpin = 3; // 244Hz PWM signal + blue LED
const byte ALARMpin = 4; // red LED for ALARM
// default parameters:
int Tmaxi_d = 85; // first use maximum temperature = 85C
int Tmini_d = -1; // first use frost temperature = -1C
int deltaTon_d = 5; // first use starting threshold = 5K
int deltaToff_d = 2; // first use stoping threshold = 2K
int deltaTpwm_d = 1; // first use PWM ration management threshold = 1K
byte pump_model_d = 0; // pump model, first use = 0
// 0: non-PWM pump, 1: rising PWM , 2: falling PWM
byte ssr_rule_d = 0; // SSR usage drive, first use =0
// 0: pump, 1: boiler, 2: Tmini alarm, 3: Tmaxi alarm
// LCD with I2C declaration :
LiquidCrystal_I2C lcd(0x27, 16, 2);
// specific symbols to display:
byte degree[8] = { 0b11100, 0b10100, 0b11100, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000};
byte fleche_bas[8] = { 0b00100, 0b00100, 0b00100, 0b00100, 0b00100, 0b11111, 0b01110, 0b00100};
byte fleche_haut[8] = { 0b00100, 0b01110, 0b11111, 0b00100, 0b00100, 0b00100, 0b00100, 0b00100};
byte fleche_stable[8] = { 0b00100, 0b01110, 0b11111, 0b00100, 0b00100, 0b11111, 0b01110, 0b00100};
// DS18B20 declaration:
OneWire sondeDS(DS18B20);
// variables for temperature management:
float Tsource, Tcumulus, memo_Tcumulus; // past value for tendency calculation
int deltaTon, deltaToff, deltaTpwm;
int Tmaxi, Tmini;
byte tendency = 4; // tendency 2=increase, 3=decrese, 4=stable
// variables for process management:
byte pump_model; // 0: non PWM, 1: rising PWM, 2: falling PWM
byte ssr_rule; // 0: pump, 1: boiler, 2: Tmini alarm, 3: Tmaxi alarm
byte state, memo_state = 0; // give the overoll state of the device:
// 0: off, 1: on, 2: Tmini, 3: Tmaxi, 4: forced, 5: boiler
bool mforce = LOW; // flag if pump always ON
bool boiler = LOW; // flag if a boiler is driven
unsigned long memo_tempo = 0; // flag for time count
// variables for PWM:
byte ratio = 0; // initial PWM duty cycle
byte PWM; // final PWM (take in account if Rising or Falling PWM)
const byte PWMmini = 25; // minimum ratio when pup is active
// variables for push-buttons & menus
const char label_pump[] = {'A', 'M', 'G', 'T', 'F', 'S' };
// label displayed : A: off, M: on, G: Tmini, T: Tmaxi, F: forced, S: boiler
byte ret_push_button, memo_ret_push_button = 0; // function return value when a push-button is pushed
String label;
byte window = 0; // index of window to display
byte windowsTotal = 11; // total number of windows (including window 0)
byte count_before_timeout = 0;
byte timeout = 60; // display switch off delay
bool eeprom = false; // flag a backup needed
//
// SETUP
//_____________________________________________________________________________________________
void setup() {
lcd.begin();
pinMode (ENTRYpin, INPUT_PULLUP);
pinMode (PLUSpin, INPUT_PULLUP);
pinMode (MINUSpin, INPUT_PULLUP);
pinMode (ALARMpin, OUTPUT);
pinMode (SSRpin, OUTPUT);
pinMode (SSR_INVpin, OUTPUT);
pinMode (PWMpin, OUTPUT);
// Timer2 set for PWM at 244Hz
TCCR2A = 0b00100011; // Fast PWM Mode
TCCR2B = 0b00000110; // formula => binary = 62500 / (F * 256)
OCR2B = 0; // duty ration is 0 at startup
// LCD => special homemade characters are assigned
lcd.createChar(1, degree ); // =1, etc...
lcd.createChar(2, fleche_haut );
lcd.createChar(3, fleche_stable );
lcd.createChar(4, fleche_bas );
// get data from the EEPROM, type byte. So offset of 50 for negative temperature values :
// defaut EEPROM content is 255 at very first usage.
if(EEPROM.read(0) < 70) { deltaTon = EEPROM.read(0) - 50; }
else { EEPROM.write(0, deltaTon_d + 50); deltaTon = deltaTon_d; }
if(EEPROM.read(1) < 60) { deltaToff = EEPROM.read(1) - 50; }
else { EEPROM.write(1, deltaToff_d + 50); deltaToff = deltaToff_d; }
if(EEPROM.read(2) < 60) { deltaTpwm = EEPROM.read(2) - 50; }
else { EEPROM.write(2, deltaTpwm_d + 50); deltaTpwm = deltaTpwm_d; }
if(EEPROM.read(3) < 150) { Tmaxi = EEPROM.read(3) - 50; }
else { EEPROM.write(3, Tmaxi_d + 50); Tmaxi = Tmaxi_d; }
if(EEPROM.read(4) < 60) { Tmini = EEPROM.read(4) - 50; }
else { EEPROM.write(4, Tmini_d + 50); Tmini = Tmini_d; }
if(EEPROM.read(5) < 3) { pump_model = EEPROM.read(5); }
else { EEPROM.write(5, pump_model_d); pump_model = pump_model_d; }
if(EEPROM.read(6) < 4) { ssr_rule = EEPROM.read(6); }
else { EEPROM.write(6, ssr_rule_d); ssr_rule = ssr_rule_d; }
// console and LCD initialisation
Serial.begin(9600);
Serial.println("ready ...");
Serial.println ();
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Thermostat by");
lcd.setCursor(0, 1);
lcd.print("PhilippeDC");
delay(500);
} // end of setup
//
// LOOP
//____________________________________________________________________________________________
void loop() {
unsigned long tempo = millis()/800; // time count a littke less than one seconds
if( memo_tempo == tempo ) return; // everything after is done every second
memo_tempo = tempo;
static unsigned int heatTimeOut = 0; // counter for boiler offline alarm
// STEP 1: get the temperature values
//____________________________________________________________________________________________
// as it is needed 1.6s to get the temperature for both sensors, this is done
// only when we are out of the parameters setting
if(window== 0) {
GetTemperature(&Tsource, true); // true only for the first reading
GetTemperature(&Tcumulus, false); }
// STEP 2: compare temperature with the thresholds
//____________________________________________________________________________________________
// deltaTonn is reached : the pump is starting
memo_state = state; // remaind the past state
if( Tsource-Tcumulus-deltaTon >= 0 ) {
state = 1;
if(memo_state == 0) ratio = 50; } // duty cycle 50% when pump is starting
// the pump is running, PWM increases until 100%
if((state==1)&&(Tsource-Tcumulus-deltaToff-deltaTpwm >0)&&(ratio < 100))
ratio++;
// deltaTpwm is reached so PWM is starting to decrease
if((state==1)&&(Tsource-Tcumulus-deltaToff-deltaTpwm <=0)&&(tendency==2)&&(ratio > PWMmini))
ratio--;
// deltaToff is reached so the pump stops
if(Tsource-Tcumulus-deltaToff <=0) {
state = 0;
ratio = 0; }
// Tmini reached : the pump starts + ALARM
if(Tsource <= Tmini) {
state = 2;
ratio = 50;
Alarm(3); } // red LED blinks 3 times/second
// pump is always on
if(mforce == HIGH) {
state = 4;
ratio = 50;
Alarm(1); } // red LED blinks 1 time/second
// drive a boiler
if(ssr_rule == 1) {
state = 5; // start the boiler
if(Tsource < 40) { // check the heat of the source
PWM = 0; // pump stop if no heat
heatTimeOut++; // count seconds
if( heatTimeOut > 375 ) Alarm(2); } // after 375 count = 10 minutes
else heatTimeOut = 0; }
// Tmaxi reached : the pump is stopped + ALARM
if(Tcumulus >= Tmaxi || Tsource > Tmaxi ) {
state = 3;
ratio = 0;
Alarm(5); } // red LED blinks 5 times/second
// Step 3: outputs management
//____________________________________________________________________________________________
// PWM management:
// pump_model == 0 for NON-PWM pump
// pump_model == 1 for Rising PWM pump
// pump_model == 2 for Falling PWM pump
if(pump_model == 1) PWM = map(ratio, 0, 100, 0, 255);
else if(pump_model == 2) PWM = map(ratio, 0, 100, 255, 0);
else PWM = 0;
analogWrite(PWMpin, PWM); // commande du PWM / mli
// SSR management
// ssr_rule == 0 to drive pump (require if pump_model =0)
// ssr_rule == 1 to drive the boiler,
// ssr_rule == 2 to drive Tmini alarm,
// ssr_rule == 3 to drive Tmaxi alarm
if( ssr_rule == 0 ) { // case NON-PWM pump
if((state == 1)||(state==2)||(state==4)) {
digitalWrite(SSRpin, HIGH); digitalWrite(SSR_INVpin, LOW); }
else {
digitalWrite(SSRpin, LOW); digitalWrite(SSR_INVpin, HIGH); }
} // end of ssr_rule == 0
else if( ssr_rule == 1 ) { // case boiler
if( state == 5 ) {
digitalWrite(SSRpin, HIGH); digitalWrite(SSR_INVpin, LOW); }
else {
digitalWrite(SSRpin, LOW); digitalWrite(SSR_INVpin, HIGH); }
} // end of ssr_rule == 1
else if( ssr_rule == 2 ) { // case alarm Tmini
if( state == 2 ) {
digitalWrite(SSRpin, HIGH); digitalWrite(SSR_INVpin, LOW); }
else {
digitalWrite(SSRpin, LOW); digitalWrite(SSR_INVpin, HIGH); }
} // end of ssr_rule == 2
else if( ssr_rule == 3 ) { // case alarm Tmaxi
if( state == 3 ) {
digitalWrite(SSRpin, HIGH); digitalWrite(SSR_INVpin, LOW); }
else {
digitalWrite(SSRpin, LOW); digitalWrite(SSR_INVpin, HIGH); }
} // end of ssr_rule == 2
// Step 4 : tendency calculation
//____________________________________________________________________________________________
static unsigned int cycleCounter = 0; // counter for tendencies
if(++cycleCounter > 5) {
cycleCounter = 0;
if( Tcumulus > memo_Tcumulus ) tendency = 2; // draw rising arrow on display
if( Tcumulus == memo_Tcumulus ) tendency = 3; // draw stable arrow on display
if( Tcumulus < memo_Tcumulus ) tendency = 4; // draw falling arrow on display
memo_Tcumulus = Tcumulus; // keep past measure
} // end of test cycleCounter
// Step 5: display & parameters management
//____________________________________________________________________________________________
// check push-buttons & display ON / OFF
//____________________________________________________________________________________________
memo_ret_push_button = ret_push_button; // memorize past value
ret_push_button = push_button(); // reading push-button status
// 0: nothing, 1: ENTRY, 2: PLUS, 3: MINUS
count_before_timeout++; // timeout before switch off the display
if( count_before_timeout > timeout ) { // timeout reached
window = 0; // return to first display
lcd.clear();
lcd.noBacklight(); // light off display
}
if((memo_ret_push_button == 1)&&(ret_push_button == 1)) next_window();
// regular case: no push-buttonactivity
//____________________________________________________________________________________________
if( window== 0 ) {
lcd.setCursor(0, 0);
lcd.print("SOURCE:");
if( Tsource < 100 ) lcd.print(" ");
lcd.print(String(Tsource, 1));
lcd.write(1); // display character ''
lcd.print("C ");
lcd.setCursor(15, 0);
lcd.write(label_pump[state]);
lcd.setCursor(0, 1);
lcd.print("BALLON: ");
lcd.print(String(Tcumulus, 1));
lcd.write(1);
lcd.print("C ");
lcd.setCursor(15, 1);
lcd.write(tendency); // dram the arrow
} // end of windows == 0
// ENTRY button pushed
//____________________________________________________________________________________________
if( window == 1 ) {
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("LISTE DES");
lcd.setCursor(0, 1);
lcd.print("PARAMETRES :");
delay(800);
next_window();
} // end of windows == 1
// parameters setting
if( window == 2 ) {
if(ret_push_button == 2) {
deltaTon++;
deltaTon = constrain(deltaTon, 0, 9); } // limit value between 0 to 9
if(ret_push_button == 3) {
deltaTon--;
deltaTon = constrain(deltaTon, deltaToff, 9); }
lcd.setCursor(0, 0);
lcd.print("DELTA T MARCHE :");
lcd.setCursor(0, 1);
lcd.print(deltaTon);
lcd.write(1);
lcd.print("K ");
} // end of window == 2
if( window == 3 ) {
if(ret_push_button == 2) {
deltaToff++;
deltaToff = constrain(deltaToff, 0, deltaTon); }
if(ret_push_button == 3) {
deltaToff--;
deltaToff = constrain(deltaToff, 0, 9); }
lcd.setCursor(0, 0);
lcd.print("DELTA T ARRET :");
lcd.setCursor(0, 1);
lcd.print(deltaToff);
lcd.write(1);
lcd.print("K");
} // end of window == 3
if( window == 4 ) {
if(ret_push_button == 2) {
deltaTpwm++;
deltaTpwm = constrain(deltaTpwm, 0, 9); }
if(ret_push_button == 3) {
deltaTpwm--;
deltaTpwm = constrain(deltaTpwm, 0, 9); }
lcd.setCursor(0, 0);
lcd.print("DELTA T PWM :");
lcd.setCursor(0, 1);
lcd.print(deltaTpwm);
lcd.write(1);
lcd.print("K ");
} // end of window == 4
if( window == 5 ) {
if(ret_push_button == 2) {
Tmaxi++;
Tmaxi = constrain(Tmaxi, 40, 100); }
if(ret_push_button == 3) {
Tmaxi--;
Tmaxi = constrain(Tmaxi, 40, 100); }
lcd.setCursor(0, 0);
lcd.print("T MAXI ALARME :");
lcd.setCursor(0, 1);
lcd.print(Tmaxi);
lcd.write(1);
lcd.print("C ");
} // end of windows == 5
if( window == 6 ) {
if(ret_push_button == 2) {
Tmini++;
Tmini = constrain(Tmini, -9, 9); }
if(ret_push_button == 3) {
Tmini--;
Tmini = constrain(Tmini, -9, 9); }
lcd.setCursor(0, 0);
lcd.print("T HORS GEL :");
lcd.setCursor(0, 1);
lcd.print(Tmini);
lcd.write(1);
lcd.print("C ");
} // end of window == 6
if( window == 7 ) {
if(ret_push_button == 2) pump_model = (pump_model +1)%3;
if(ret_push_button == 3) pump_model = (pump_model -1)%3;
if(pump_model == 0) label = "NON-PWM ";
else if(pump_model == 1) label = "PWM CROISSANT ";
else if(pump_model == 2) label = "PWM DECROISSANT";
lcd.setCursor(0, 0);
lcd.print("MODELE DE POMPE:");
lcd.setCursor(0, 1);
lcd.print(label);
} // end of window == 7
if( window == 8 ) {
if( pump_model == 0 ) label = "POMPE NON-PWM ";
else {
if(ret_push_button == 2) ssr_rule = (ssr_rule +1)%4;
if(ret_push_button == 3) ssr_rule = (ssr_rule -1)%4;
if(ssr_rule == 0) label = "POMPE NON-PWM ";
else if(ssr_rule == 1) label = "CHAUDIERE ";
else if(ssr_rule == 2) label = "PROTECTION GEL ";
else if(ssr_rule == 3) label = "PROT. EBULLITION";
}
lcd.setCursor(0, 0);
lcd.print("USAGE COMMANDE :");
lcd.setCursor(0, 1);
lcd.print(label);
} // end of window == 8
if( window == 9 ) {
lcd.setCursor(0, 0);
lcd.print("REINITIALISATION");
lcd.setCursor(0, 1);
lcd.print("POUR VALIDER : +");
if(ret_push_button == 2) {
lcd.setCursor(0, 0);
lcd.print("REINITIALISATION");
lcd.setCursor(0, 1);
lcd.print("FAITE ");
deltaTon = deltaTon_d; // default value to all parameters
deltaToff = deltaToff_d;
deltaTpwm = deltaTpwm_d;
Tmaxi = Tmaxi_d;
Tmini = Tmini_d;
pump_model = pump_model_d;
ssr_rule = ssr_rule_d;
mforce = LOW; // stop always ON capability
window= 0; }
} // end of windows == 9
if( window == 10 ) {
lcd.setCursor(0, 0);
lcd.print("MARCHE FORCEE ? ");
lcd.setCursor(0, 1);
lcd.print("OUI= + / NON= - ");
if(ret_push_button == 2) {
mforce = HIGH;
lcd.setCursor(0, 0);
lcd.print("MARCHE FORCEE ");
lcd.setCursor(0, 1);
lcd.print("CONFIRMEE ");
window = 0; }
if(ret_push_button == 3) {
mforce = LOW;
lcd.setCursor(0, 0);
lcd.print("MARCHE FORCEE ");
lcd.setCursor(0, 1);
lcd.print("ARRETEE ");
window = 0; }
} // end of windows == 10
// EEPROM backup
//____________________________________________________________________________________________
if( eeprom = true ) { // EEPROM backup only if needed
EEPROM.update(0, deltaTon + 50);
EEPROM.update(1, deltaToff + 50);
EEPROM.update(2, deltaTpwm + 50);
EEPROM.update(3, Tmaxi + 50);
EEPROM.update(4, Tmini + 50);
EEPROM.update(5, pump_model);
EEPROM.update(6, ssr_rule);
}
// for debugging
//____________________________________________________________________________________________
Serial.print("ssr_rule: "); Serial.print(ssr_rule);
Serial.print(" state: "); Serial.print(state);
Serial.print(" ratio: "); Serial.print(ratio);
Serial.print(" PWM: "); Serial.print(PWM);
Serial.print(" Ts: "); Serial.print(Tsource);
Serial.print(" Tc: "); Serial.print(Tcumulus);
Serial.print(" Ts-Tc-deltaToff: "); Serial.print(Tsource-Tcumulus-deltaToff);
Serial.println();
} // end of loop
//============================================================================================
// list of functions
//============================================================================================
//
// next_window() : procedure to change the window display
//____________________________________________________________________________________________
void next_window() {
window = (window+1) % windowsTotal; // next window
lcd.clear();
} // end of next_window()
//
// push_button() : return value depending of the state of the 3 push-buttons
//____________________________________________________________________________________________
byte push_button() {
if ( digitalRead(ENTRYpin) == LOW ) {
count_before_timeout = 0; // reset the timeout counter
lcd.backlight(); // switch on display
lcd.clear();
return 1;
}
if ( digitalRead(PLUSpin) == LOW ) {
count_before_timeout = 0;
lcd.backlight();
eeprom = true;
return 2;
}
if ( digitalRead(MINUSpin) == LOW ) {
count_before_timeout = 0;
lcd.backlight();
eeprom = true;
return 3;
}
return 0;
} // end of push_button()
//
// GetTemperature() : reading measures of DS18B20
//____________________________________________________________________________________________
byte GetTemperature(float *temperature, byte reset_search) {
byte data[9], addr[8]; // data[] : data read from scratchpad
// addr[] : Address of detected 1-Wire device
// reset the list of adresses for the first sensor
// char argument = "true" or "false"
if(reset_search) sondeDS.reset_search();
sondeDS.search(addr);
sondeDS.reset();
sondeDS.select(addr);
sondeDS.write(0x44, 1); // getting the temperature takes as long as 1/2 second for each sensor
delay(800); // required, see above comment
sondeDS.reset();
sondeDS.select(addr);
sondeDS.write(0xBE); // send request from scratchpad
// the scratchpad content makes 9 bytes:
for (byte i = 0; i < 9; i++) { data[i] = sondeDS.read(); }
// miraculous formula to get the temperature in C with a 12 bits resolution, accurancy of 0,06K:
// it is possible to modify this formula to get F
*temperature = ((data[1] << 8) | data[0]) * 0.0625;
} // end of getTemperature()
//
// Alarm() red LED lighting management
//____________________________________________________________________________________________
void Alarm(byte c) {
for( byte i=0; i<c; i++ ) {
digitalWrite(ALARMpin, HIGH); delay(10);
digitalWrite(ALARMpin, LOW); delay(200);
}
} // end of Alarm()



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)













{kind=link}
Comments