


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
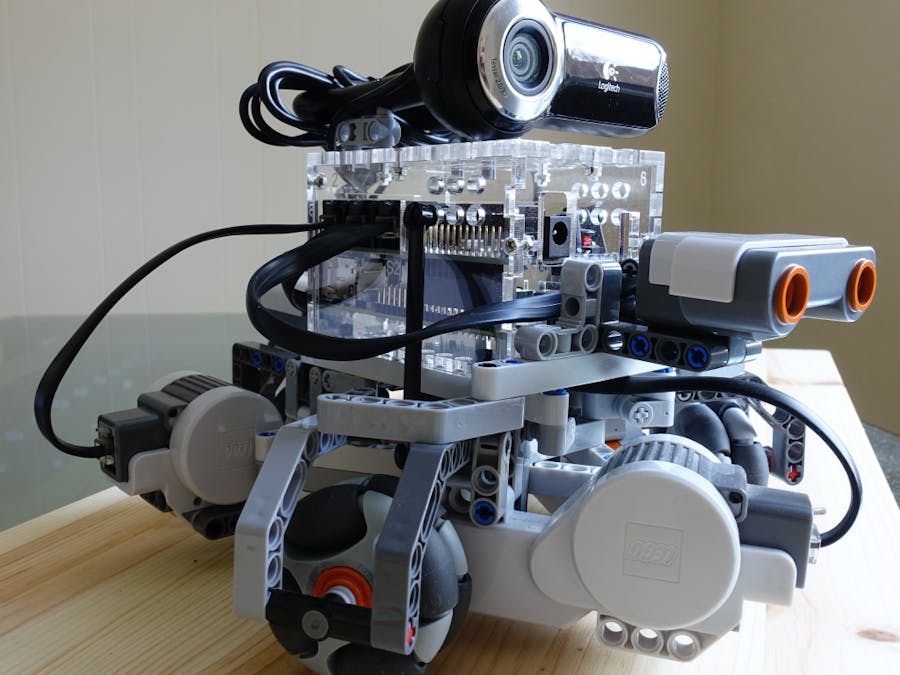
TurBo is a holonomic robot using three Rotacaster wheels and can drive in any direction independent of the direction it is facing and can also turn while driving.
Bumper in the back, Ultrasonic distance sensor front, and Color sensor bottom.
The heart, or rather brain is an Raspberry Pi 2 running Windows IoT Core, linked with Dexter BrickPi kit to control the Lego Mindstorms (NXT) sensors and motors.
The Pi and BrickPi board are housed in a nice acrylic case to connect LEGO technic bricks and fits with Lego connectors.
Once mounted on the chassis, is forms the shape of a hump, maybe like a turtle. That's also where the name for this little creature came from - turtle-robot.
Finally an older USB web cam has been fitted with Lego connectors to be mounted atop the case.
For software, there are two parts. The one is handling communication between Windows UWP platform and the BrickPi board, and all done in a component called BrickPi.UWP. This allows to control Mindstorms NXT motors and read data from the NXT sensors.
Easiest way to get started is using a Nuget package available from here. Full source code and documentation is available in GitHub here.
The other part is controlling all the higher level functionality, such as steering the robot based on sensor input, joystick or remote control. Also it contains functionality to capture images and upload to OneDrive or Azure Blob storage, and a basic UWP app for Mobile/Desktop to control the robot.
Working samples are available on GitHub here, but this code should be seen as inspiration only to customize a robot. Further work is planned for video-streaming and more autonomous driving. Also using UWP and Windows IoT Core, it is easily possible to connect to Azure cloud services for remote telemetry or control scenarios.






Comments