


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
Notes on the English version: I am Italian and speak little English. All this text is the result of Google Translate. If you find serious errors in the translation and want to report them, I thank you in advance. Send notes to lpautas @ gmail.com. Thank you
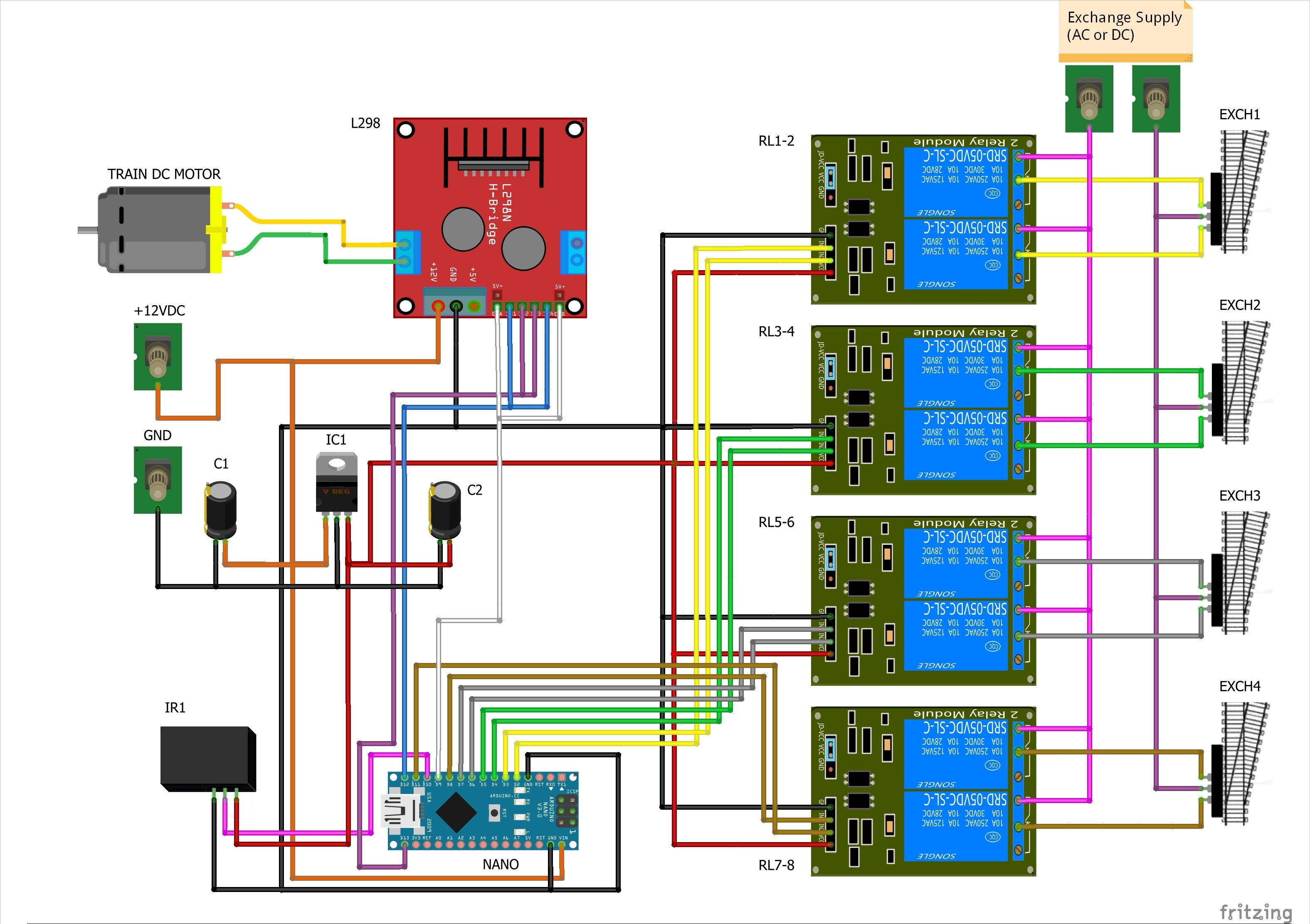
REMOTINO NANOA dear friend of mine told me: my railroad model does not satisfy me: I find it difficult to have to stay at the console to control the various actions of the trains, rather than being able to move around it: could you make a wireless remote control? The main actions are to decide train speed and speed on the main line, and to command four exchanges to decide in which circuit the train model should pass.I did these things using an ARDUINO NANO, an IR remote control and some other components.
--------------------------------------------------------------------------------------
We have 4 modes of work, that can be programmed at startup.
- Mode A, 8 rele monostable (4 scambi)
- Mode B, 8 bistable ON/OFF (attuatori generici)
- Mode C - RELE 1, 2 bistable ON/OFF (attuatori generici), RELE' 3, 4, 5, 6, 7, 8 monostable (3 scambi)
- Mode D - RELE 1, 2, 3, 4 bistable ON/OFF (attuatori generici), RELE' 5 6 7 8 monostable (2 scambi)
To move the train, press MotorOn (GO button)
Afterwards with the up / down arrows you increase / decrease speed, or you reverse direction of travel.
Keys 1 to 8 operate the 8 relays in the selected mode: monostable (for exchanges) or bistable (for accessory on / off)
The 0 key makes a slow station-type stop
The keys A, B, C, D are preset speeds, equal to 25, 50, 75 and 100% of the speed. max, and act on the current direction of travel
If I am stopped, I press CH + active forward direction, then I press A slowly and automatically reaches 25% of the speed
If I am stopped, I press CH + active forward direction, then I press B slowly and automatically reaches 50% of the speed
If I am stopped, I press CH + active forward direction, then I press C slowly and automatically reaches 75% of the speed
If I am stopped, I press CH + active forward direction, then I press D slowly and automatically reaches 100% of the speed
If they are already moving, I press A, the train moves at 25% speed automatically.
The red power button immediately stops the train (emergency stop), removing power. It is also active during slow braking or when 4 preset speeds are reached.
remote button -> actions
- 0 -> slow stop to simulate a normal station stop
- 1 -> relay 1
- 2 -> relay 2
- 3 -> relay 3
- 4 -> relay 4
- 5 -> relay 5
- 6 -> relay 6
- 7 -> relay 7
- 8 -> relay 8
- 9 -> free
- A -> 25% speed
- B -> 50% speed
- C -> 75% speed
- D -> 100% speed
- GO -> motor on
- OFF -> immediate emergency stop, stop all autom.
- CH + -> drive forward slowly if pressed (first motor on GO needed)
- CH- -> backwards slowly if pressed (first motor on GO needed)
- VOL + -> forward travel quickly if pressed (first motor on GO needed)
- VOL- -> backward quickly if pressed (first motor on GO needed)
- OK -> BOOST at 100% speed
Please visit also this video, REMOTONE MEGA https://www.youtube.com/watch?v=Pb1_M0hUV44
XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
REMOTINO NANO (ITALIAN LANGUAGE)Un mio caro amico mi ha detto: il mio plastico ferroviario non mi soddisfa: trovo complicato dover rimanere alla console per comandare le varie azioni dei treni, anzichè potermi muovere intorno ad esso: si potrebbe fare un telecomando wireless? Le azioni principali sono decidere dirfezione e velocità del treno sulla linea principale, e comandare quattro scambi per decidere in quale circuito deve passare il modellino del treno.
Ho fatto queste cose usando un ARDUINO NANO, un telecomando IR ed alcuni altri componenti.
--------------------------------------------------------------------------------------
Sono disponibili 4 modalità di funzionamento, programmabili a piacimento all power-on:
- Mode A, 8 rele monostable (4 scambi)
- Mode B, 8 bistable ON/OFF (attuatori generici)
- Mode C - RELE 1, 2 bistable ON/OFF (attuatori generici), RELE' 3, 4, 5, 6, 7, 8 monostable (3 scambi)
- Mode D - RELE 1, 2, 3, 4 bistable ON/OFF (attuatori generici), RELE' 5 6 7 8 monostable (2 scambi)
Per muovere il treno è necessario premere MotorOn (tasto GO)
Dopo con le frecce alta/bassa si aumenta/diminuisce velocità, o si inverte senso di marcia.
I tasti da 1 a 8 azionano gli 8 rele nella modalità selezionata: monostabile (per gli scambi) o bistabile (per on/off di accessori)
Il tasto 0 fa una fermata lenta tipo stazione
I tasti A, B, C, D sono velocità preimpostate, pari al 25, 50, 75 e 100% della vel. max, ed agiscono sulla direzione di marcia corrente
Se sono fermo, premo CH+ attivo direzione in avanti, poi premo A raggiunge lentamente e automaticamente il 25% della velocità
Se sono fermo, premo CH+ attivo direzione in avanti, poi premo B raggiunge lentamente e automaticamente il 50% della velocità
Se sono fermo, premo CH+ attivo direzione in avanti, poi premo C raggiunge lentamente e automaticamente il 75% della velocità
Se sono fermo, premo CH+ attivo direzione in avanti, poi premo D raggiunge lentamente e automaticamente il 100% della velocità
Se sono già in movimento, premo A, il treno si porta alla velocità del 25% automaticamente.
Il tasto 0 inizia una fermata lenta del treno.
Il tasto rosso power ferma immediatamente il treno (fermata di emergenza), togliendo corrente. E' attivo anche durante le frenate lente o il raggiungimento delle 4 velocità preimpostae.
tasto -> azioni
- 0 -> fermata lenta tipo stazione
- 1 -> relay 1
- 2 -> relay 2
- 3 -> relay 3
- 4 -> relay 4
- 5 -> relay 5
- 6 -> relay 6
- 7 -> relay 7
- 8 -> relay 8
- 9 -> free
- A -> mode A velocità al 25%
- B -> modo B velocità al 50%
- C -> mode C velocità al 75%
- D -> mode D velocità al 100%
- GO -> motor on
- OFF -> fermata immediata di emergenza, ferma ogni processo autom.
- CH+ -> marcia avanti lentamente se premuto (serve prima motor on GO)
- CH- -> marcia indietro lentamente se premuto (serve prima motor on GO)
- VOL+ -> marcia avanti rapidamente se premuto (serve prima motor on GO)
- VOL- -> marcia indietro rapidamente se premuto (serve prima motor on GO)
- OK -> BOOST al 100% della velocità
Vorresti realizzare questo circuito ma trovi difficoltà? Scrivimi lpautas @ gmail.com
Segnalo anche questo video che è REMOTONE MEGA, il fratello maggiore di REMOTINO NANO , https://www.youtube.com/watch?v=Pb1_M0hUV44


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
Comments