


Hardware components | ||||||
_baVEVgguW1.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 1 | |||
Few weeks ago I started to built a robot vehicle from an Arduino, some DC Motors and Super-Sonic Sensors. I wrote some code to let it drive around and measure distance to surrounding objects.
From this, i wanted to envolve the robot to get him an overview of the environment. To do this, I tried to let him perform a 360 degree turn, while receiving data from the sonic sensor rapidly.
I ran into problems and realized:
- Doing an exactly full turn with DC Motors isn't reachable without additional sensoric, because of unknown variables like acceleration, speed and start time to targeted speed
- Measuring the distance with a single or few sensors while rotating let the results be increasingly inaccurate the faster you rotate. To avoid this I must have more proximity sensors and let them communicate with each other
The Arduino101 combined with the right sensors could lead the robot to his predetermined task:
Scan the surrounding outer world and built a distance map from it's ouput. There are many things imaginable working with it's data.
Not only that, my challenge is to imitate the function of a 2d/3d laser sensor, for which you will pay a lot of $s. Imagine: Buy some cheap sensors, combine them with the glue of code and get nearly the same results....
Sensoric definetly needed to achievethis goal would be some proximity sensors, a gyroscope and acceleration sensor to get control over the dc motors. The 101s included sensoric would solve this problem.
Some additional ideas to work further on:
- Optical/Light Sensors to create a brightness overlay view of the map
- A Camera with training of neuronal networks to recognize objects to describe the environment
- This is pure coding, but let the vehicle drive around, explore and combine all gathered information together to extend the map from a central point of view to a model of a whole room or terrain with all it's objects and their dimensions
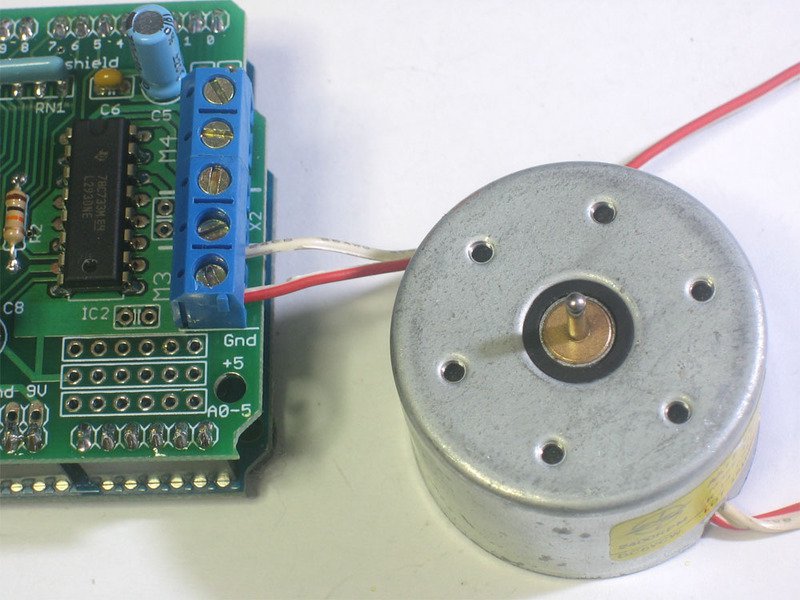
P.S.: The picture shows the first iteration of the robot vehicle, still with an Arduino UNO ;)
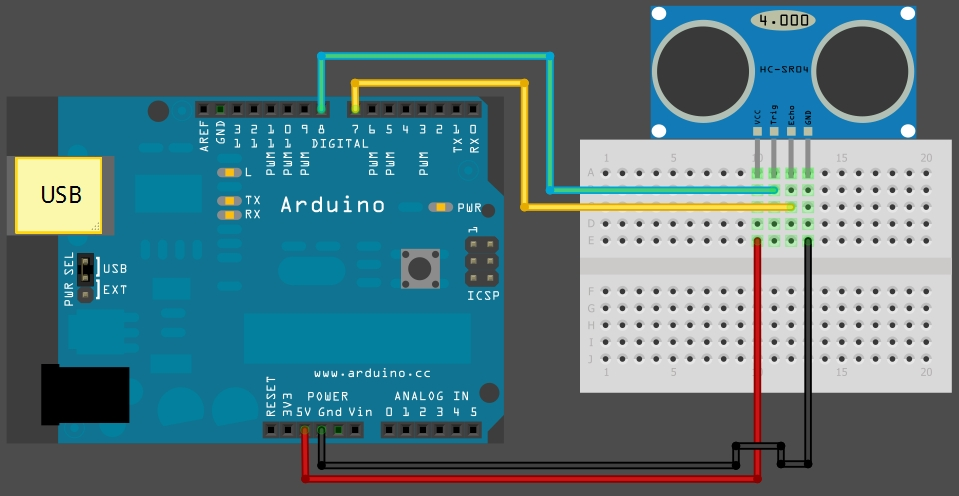
HC-SR04 SuperSonic Sensor Connection
{kind=link}
{kind=link}

Comments