

This is my first robot design. It uses the TAMIYA Twin-Motor Gearbox and TAMIYA Track and Wheel Set. The controller is the MSP430 Launch Pad and uses the L298 motor controller. It has 3 switching power supplies providing 3V at 4A, 3.3V at 500mA, and 5V at 1A. The main power source is a single cell 3.7V lithium battery. The robot has a on board lithium battery charger and the protection circuit it needs.
There is a small protoboard area that will allow easy expansion on the PCB. Since most robot sensors run off of 5V there is a 3.3V to 5V bi-directional level shifter using the NVT2010PW. The robot also comes with motor encoders by using photo interrupters.
The chassis has many options in how to build it. Files will be provided on laser cutting, 3D printing, or templates to cut them out manually.
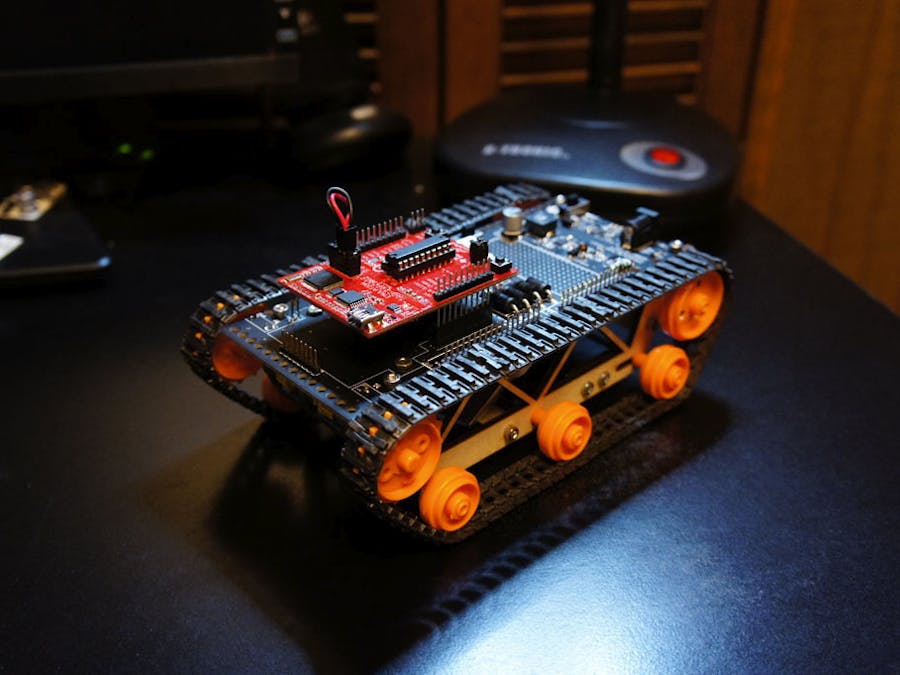
The populated PCB with the Ti LaunchPad socketed on top. There was a slight issue with the 3.3V power rail but it turned out to be a faulty capacitor on the feedback loop. Other then that the board worked great the first time I powered it up!
Fully assembled and ready to program.
PCB Files (Eagle V6)
PCB Ver 1.1ASchematic Ver 1.1ABill of Materials Schematic Ver 1.1A
Bill of Materials
Chassis Files (AutoDesk 123D)
Laser Cutting Ver 1.0Laser Cutting Ver 1.1Laser Cutting Ver 1.2
Patrick Fitzpatrick
 Carlos Ventura
Carlos Ventura
Comments