


Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
I’ve always been fascinated by unconventional robotic designs—particularly spherical robots. Their unique form factor allows them to move fluidly in any direction, navigate tight spaces, and even function in rugged environments. But despite their appeal, spherical robots often seem complex or expensive to build.
That’s where this project comes in. I wanted to prove that anyone can build a functioning spherical robot with just a few off-the-shelf components, basic tools, and a little creativity. The goal? To demonstrate the simplicity, versatility, and practicality of this robotic design—without breaking the bank.
🛠️ Design & ConstructionThe outer shell of the robot is a transparent plexiglass sphere with a diameter of 20 cm. It was the perfect size: compact enough for easy handling, but large enough to house all the internal components. The transparency also made it easy to monitor what was going on inside during testing and troubleshooting.
🧱 Internal StructureAt the core of the robot is a simple wooden block measuring 6x6 cm, acting as the main chassis. To this block, I mounted two DC motors, one on each side, secured using screws. The motors are aligned horizontally, and they drive the motion of the internal system, which in turn rolls the sphere.
Attached beneath the wooden block is a weighted element—a skateboard wheel, which serves a dual function: it acts as a counterweight to stabilize the robot’s motion, and it also helps shift the center of mass downward, improving traction and control.
On the back side of the block, I installed a 9V battery, which powers both the motors and the microcontroller.
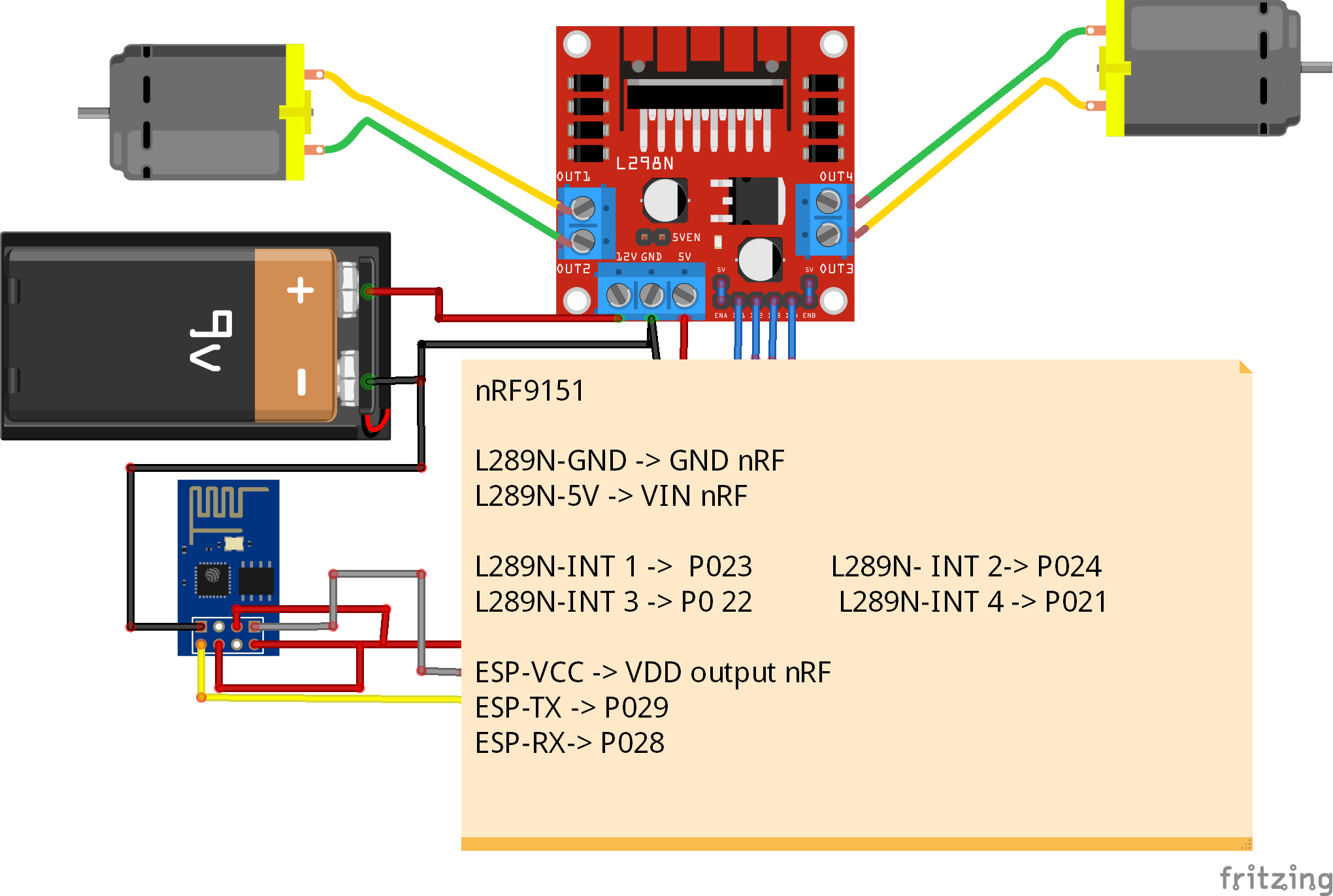
🔌 Electronics and ControlThe brain of the robot is a nRF9151 —a microcontroller that handles with LTE e GPS, that communicat with motor control. It’s wired to an L298N motor driver, which controls the two DC motors.
Microcontroller: nRF9151 + ESP01
Motor Driver: L298N Dual H-Bridge
Motors: Two basic DC gear motors
Power: Single 9V battery
All the components are connected in a compact and efficient layout, keeping weight and space usage to a minimum.
NOTE: You need to set the GPIO output to 3.3V
Controlling the robot remotely is simple and powerful thanks to a TCP connection. The ESP-01 module, connected to the nRF9151 via UART, creates its own Wi-Fi network and launches a TCP server. Once connected to the robot’s network, any device can send plain text commands—such as /go, /back, /left, or /right—using a basic TCP client.
These commands are passed from the ESP-01 to the nRF9151, which then activates the appropriate motors or actuators. This setup allows for full remote control without the need for apps or complex configurations—just Wi-Fi and a TCP client.
This makes the robot fully controllable remotely, with no additional apps or complicated software—just a Wi-Fi connection and a browser.
While this robot may seem simple at first glance, it represents a powerful concept: the ability to build intelligent, mobile, and connected systems with minimal resources. Spherical robots offer a unique combination of agility, modularity, and environmental adaptability.
And by using widely available parts, this project lowers the barrier to entry for anyone interested in robotics—students, educators, tinkerers, and innovators alike.
🚧 Challenges & Future ImprovementsOf course, no project is without its challenges. Balancing the internal components and adjusting the counterweight took some trial and error. The 9V battery provides limited runtime, and Wi-Fi range is naturally restricted by the ESP01’s capabilities.
That said, I see this robot as a prototype platform with lots of room for future upgrades:
Obviously, I will also enable LTE and GPS functionality on the nRF9151.
Adding a camera module for real-time video streaming
- Adding a camera module for real-time video streaming
Implementing autonomous navigation using AI and sensors
- Implementing autonomous navigation using AI and sensors
Creating a dedicated mobile app for intuitive control
- Creating a dedicated mobile app for intuitive control
The best part? The entire build cost me less than €20 (about $22). That includes motors, microcontroller, battery, chassis materials, and the plexiglass shell. This makes the project not just fun, but highly accessible for workshops, demos, and educational use.
🎥 See It in Action🚀 ConclusionThis low-cost spherical robot proves that simplicity doesn’t mean limitation. With a handful of components and a bit of planning, you can create a fully functional, remote-controlled robot that’s both entertaining and educational.
It’s a great entry point into the world of DIY robotics—and a solid foundation for more advanced projects.
If you're inspired to build your own, or want to contribute improvements, feel free to fork the code, share your ideas, or reach out!





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments