We started this project with a dream; a dream of freedom and a world free of fear. The worst fear in this world is feeling insecure or unsafe in your own home. We have made this feeling a thing of the past.
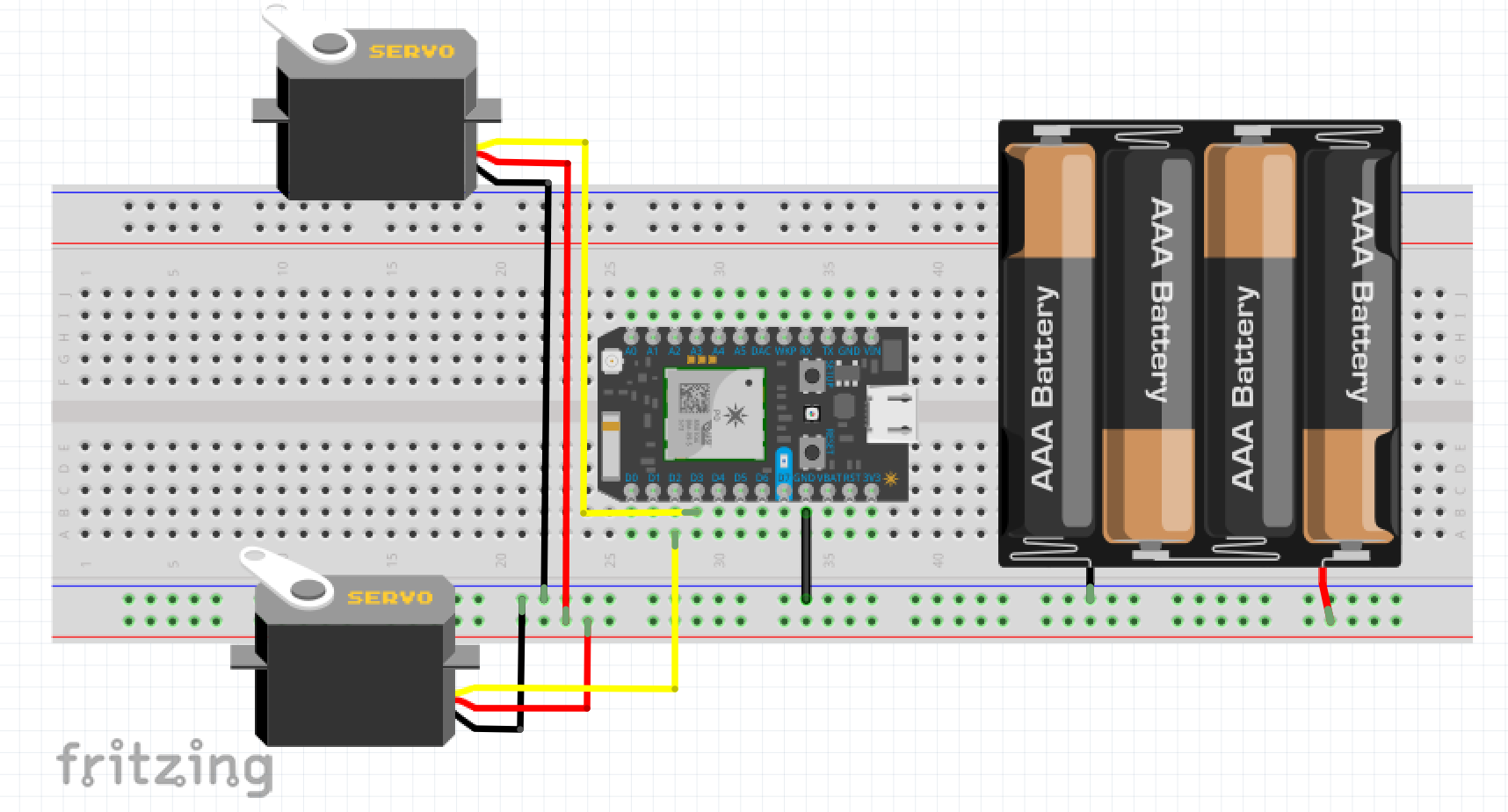
With this project, you can set up anywhere in your home and without any supervision, this sentry gun will protect your home from any intruder, with extreme prejudice. All while keeping you informed from a safe distance and giving you time to call the police and prepare yourself.
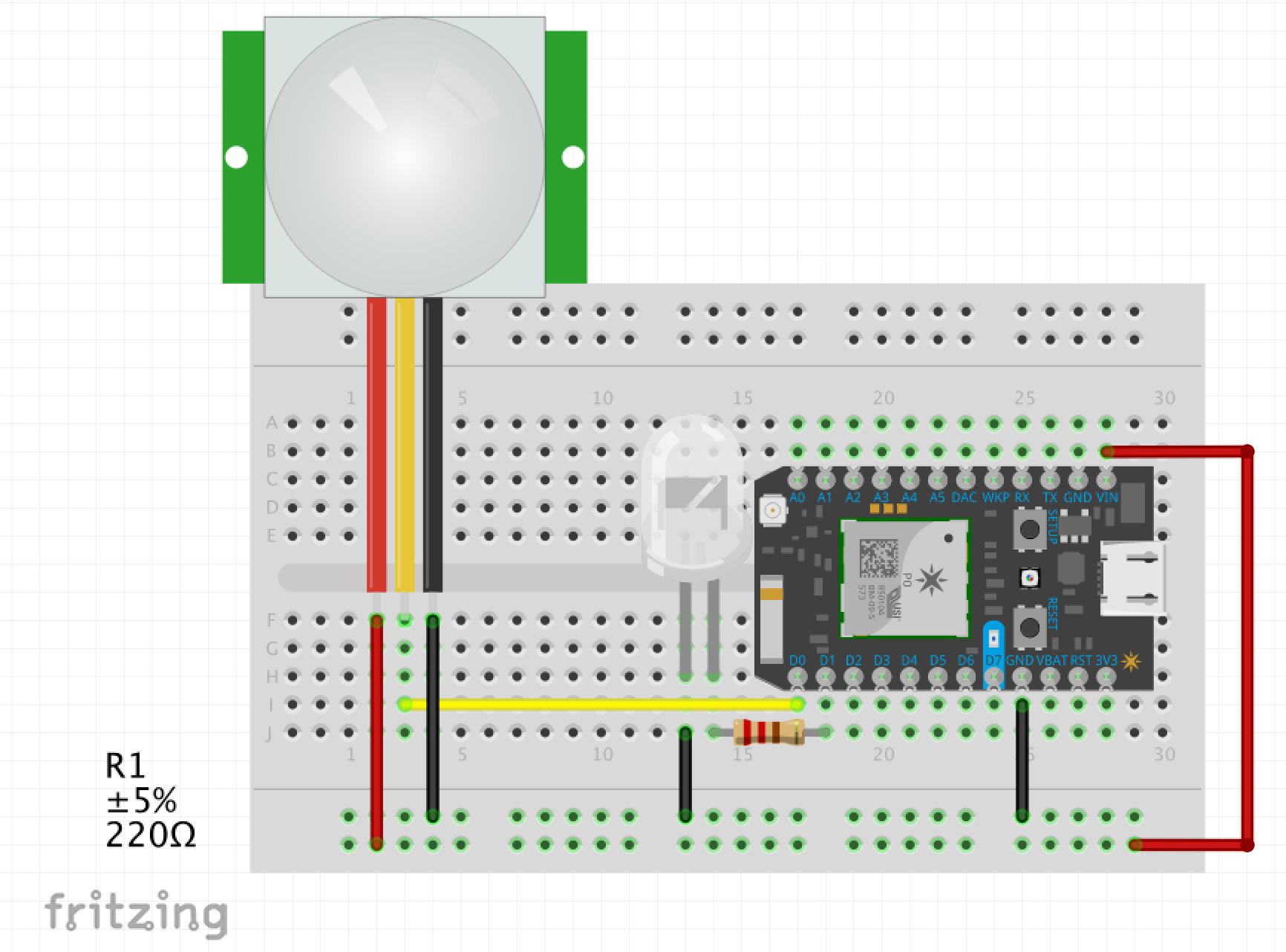
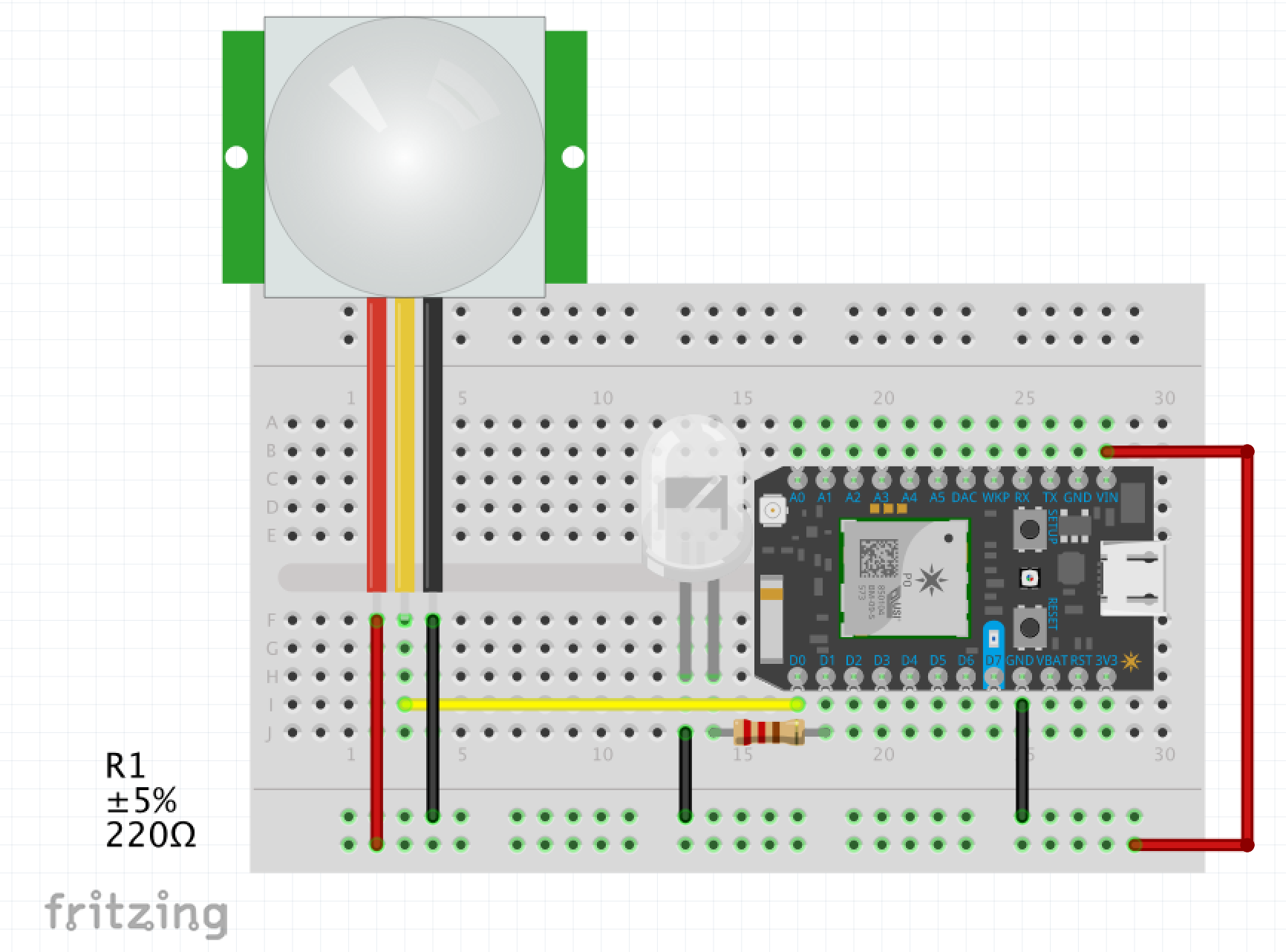
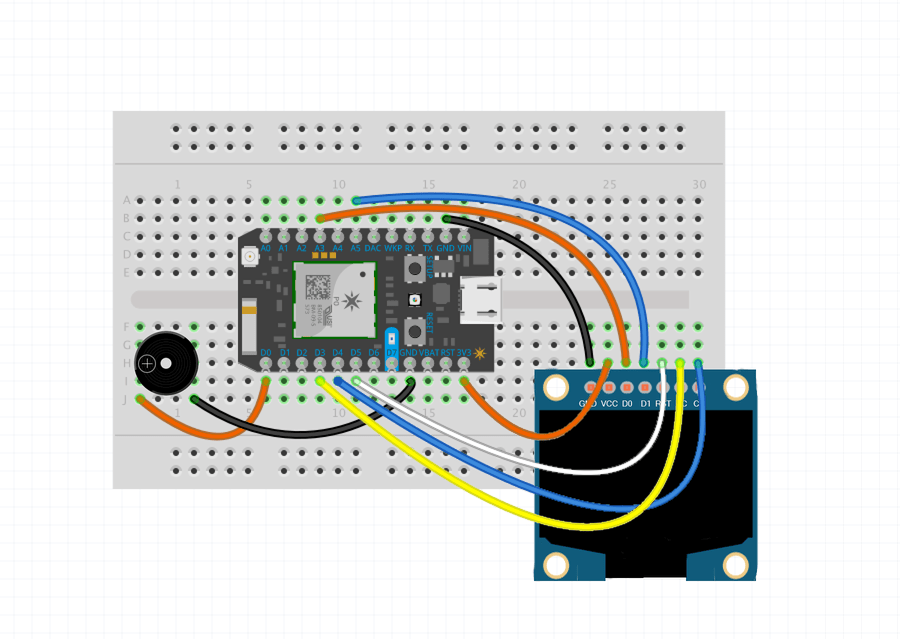
// This #include statement was automatically added by the Particle IDE.#include<Adafruit_SSD1306.h>/*****************************************************************************Motion Sensor DisplayNOTE: This code example requires the Adafruit_SSD1306 library to be included,so make sure to add it via the Libraries tab in the left sidebar.******************************************************************************/#define OLED_DC D3#define OLED_CS D4#define OLED_RESET D5Adafruit_SSD1306display(OLED_DC,OLED_RESET,OLED_CS);inty,x,minX;voidsetup(){pinMode(D7,OUTPUT);Particle.publish("DisplayPowerOn","On",PUBLIC);Particle.subscribe("DickInAVice",getMotionData);delay(2000);display.begin(SSD1306_SWITCHCAPVCC);display.setTextSize(2);display.setTextColor(WHITE);display.setTextWrap(false);y=display.height()/3;x=display.width();minX=-1500;display.clearDisplay();display.display();}voidgetMotionData(constchar*event,constchar*data){intgaveWarning=false;Stringstr=String(data);digitalWrite(D7,HIGH);if(str.equals("Motion Detected")){digitalWrite(D7,HIGH);display.clearDisplay();display.setCursor(x/6,y);display.print("*Firing*");display.display();if(--x<minX){x=display.width()*2;}if(gaveWarning==false){for(inti=0;i<3;i++){tone(D0,2000,100);delay(200);}gaveWarning=true;}}if(str.equals("Still")){digitalWrite(D7,LOW);display.clearDisplay();display.display();}}























{kind=link}
{kind=link}
{kind=link}
Comments