

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
As a 7th-grade maker, I believe that technology should be accessible and life-changing. Traditional canes for the visually impaired haven't changed much in decades. They can detect objects on the ground, but they often fail to protect users from head-level obstacles or provide real-time environment intelligence. My project, ÖmerOS Visionary Path, aims to transform a simple tool into an AI-powered smart assistant.
The ProblemVisually impaired individuals face two major challenges:
Head-Level Hazards: Low-hanging branches or signs that a standard cane cannot reach.
- Head-Level Hazards: Low-hanging branches or signs that a standard cane cannot reach.
Lack of Object Intelligence: A standard cane tells you something is there, but not what it is.
- Lack of Object Intelligence: A standard cane tells you something is there, but not what it is.
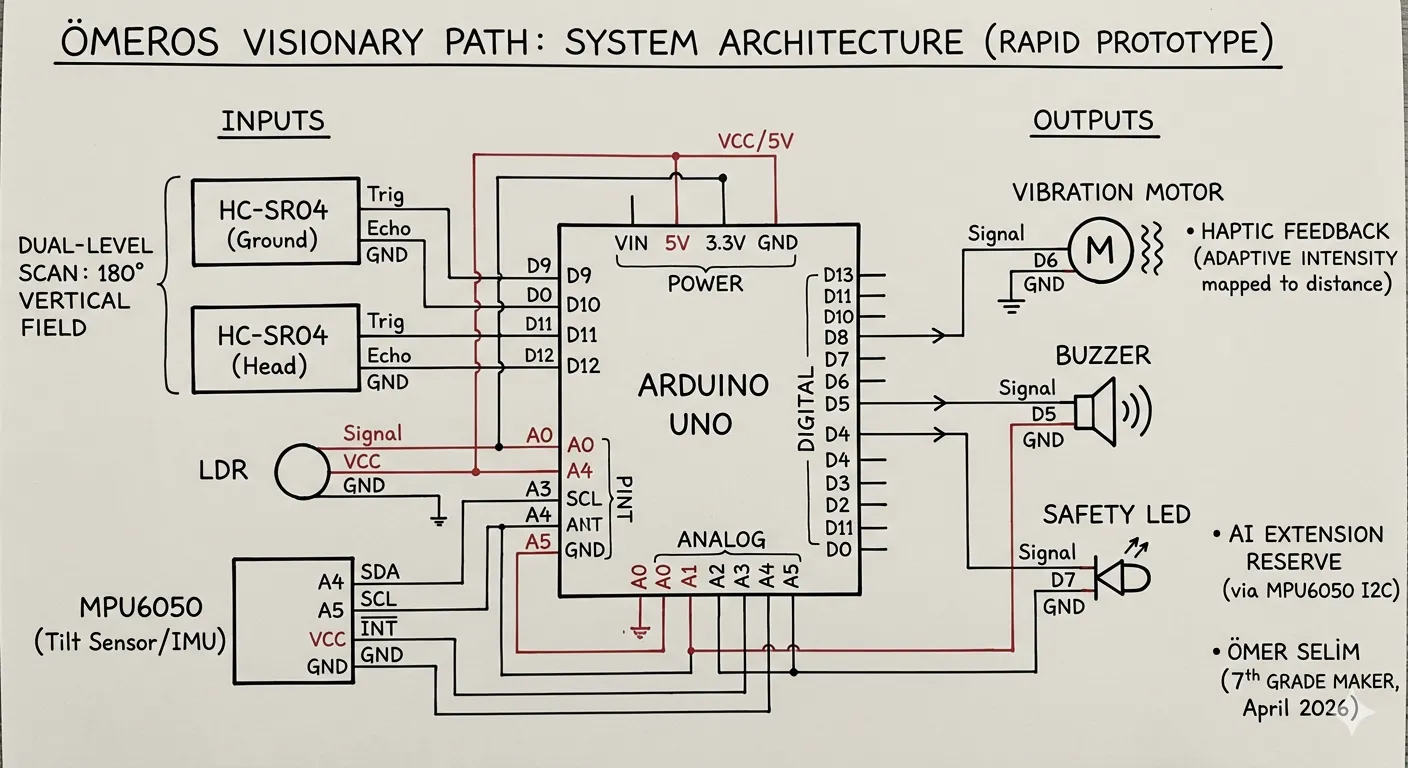
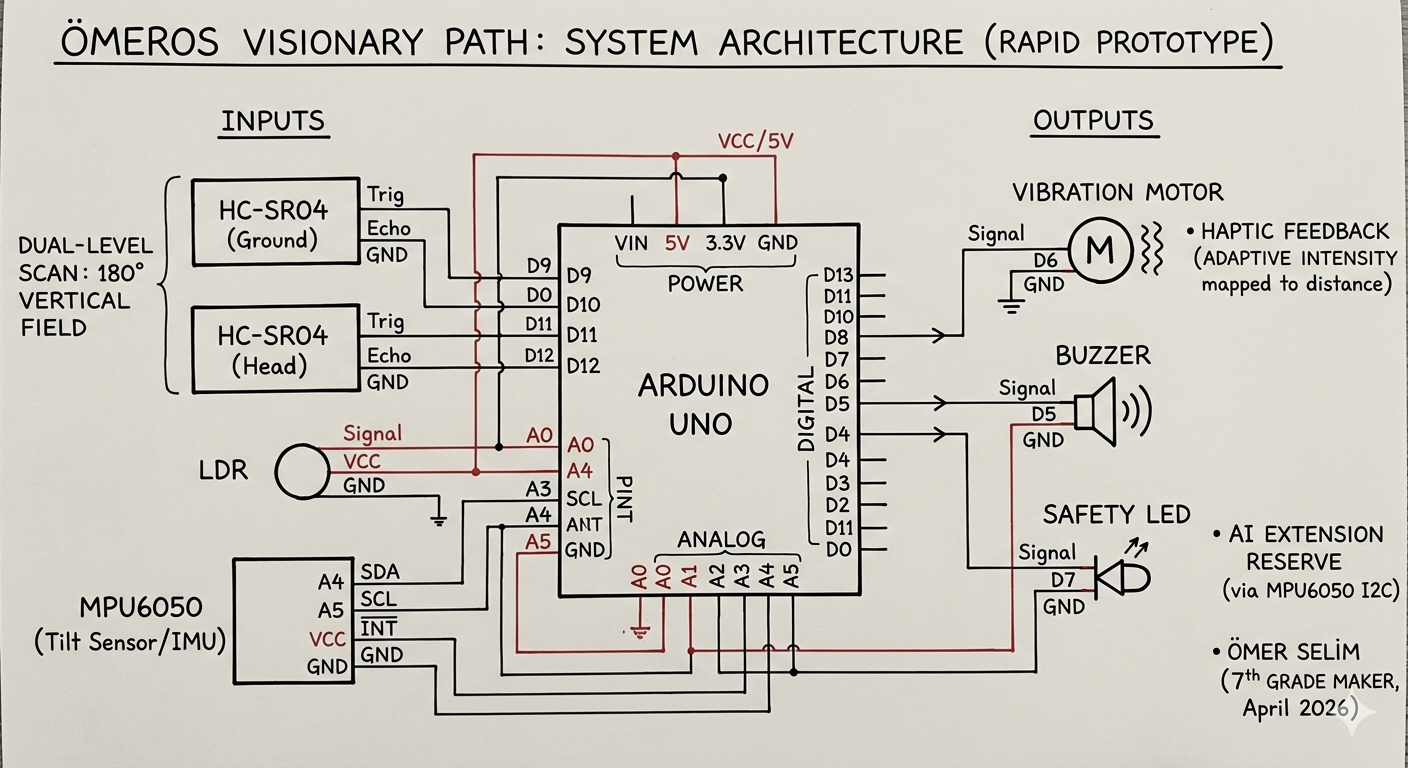
The current prototype uses an Arduino Uno with dual-level ultrasonic sensors to detect obstacles from the ground to the head. However, to take this to the next level, I need the power of the Arduino Uno Q.
By integrating the AI capabilities of the Qualcomm App Lab, I plan to:
Object Recognition: Use AI to distinguish between a wall, a person, or a flight of stairs.
- Object Recognition: Use AI to distinguish between a wall, a person, or a flight of stairs.
Smart Haptic Feedback: Provide different vibration patterns based on the type of obstacle detected.
- Smart Haptic Feedback: Provide different vibration patterns based on the type of obstacle detected.
Fall Detection: Use a tilt sensor (MPU6050) to detect accidents and trigger emergency alerts.
- Fall Detection: Use a tilt sensor (MPU6050) to detect accidents and trigger emergency alerts.
Dual-Sensor Array: Covers a 180-degree vertical field to ensure full-body protection.
- Dual-Sensor Array: Covers a 180-degree vertical field to ensure full-body protection.
Haptic Interface: Silent but effective feedback via a vibration motor in the handle.
- Haptic Interface: Silent but effective feedback via a vibration motor in the handle.
Night Safety: Automatic LED lighting using LDR sensors for better visibility in traffic.
- Night Safety: Automatic LED lighting using LDR sensors for better visibility in traffic.
My goal is not just to build a cane but to develop a professional safety framework under my ÖmerOS brand. With the Arduino Uno Q, I will be able to process environment data faster and more accurately, making independent mobility safer and smarter for everyone.








{kind=link}
Comments