As I was tidying up my cupboard, I stumbled upon an old game controller (Gamesir G3s) that I had purchased during my childhood. Nostalgia hit me hard! However, being the kind of person who enjoys inviting trouble, I decided to embark on the challenge of connecting this android gamepad to my new Arduino Nano RP2040 Connect. Before I knew it, I was knee-deep in research, scouring the internet for ways to connect the gamepad to my Arduino. Needless to say, my cleaning plans were quickly put on hold.
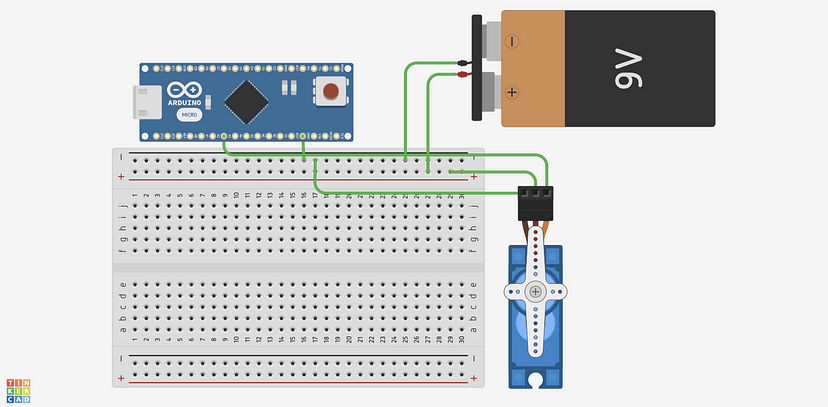
After dedicating an entire day to research, I stumbled upon a fantastic project created by Ricardo Quesada called Bluepad32. Hats off to Ricardo for making this seemingly daunting task a breeze! To make the overall process interesting, I will be controlling a servo motor using the gamepad.
Read more






{kind=link}
Comments