Hello there!
It's always fun having to control the movement of a robot from a remote control but it's more fun to control it from our smartphone.
This tutorial will guide you on how to design, build and control your own Bluetooth-controlled Car.
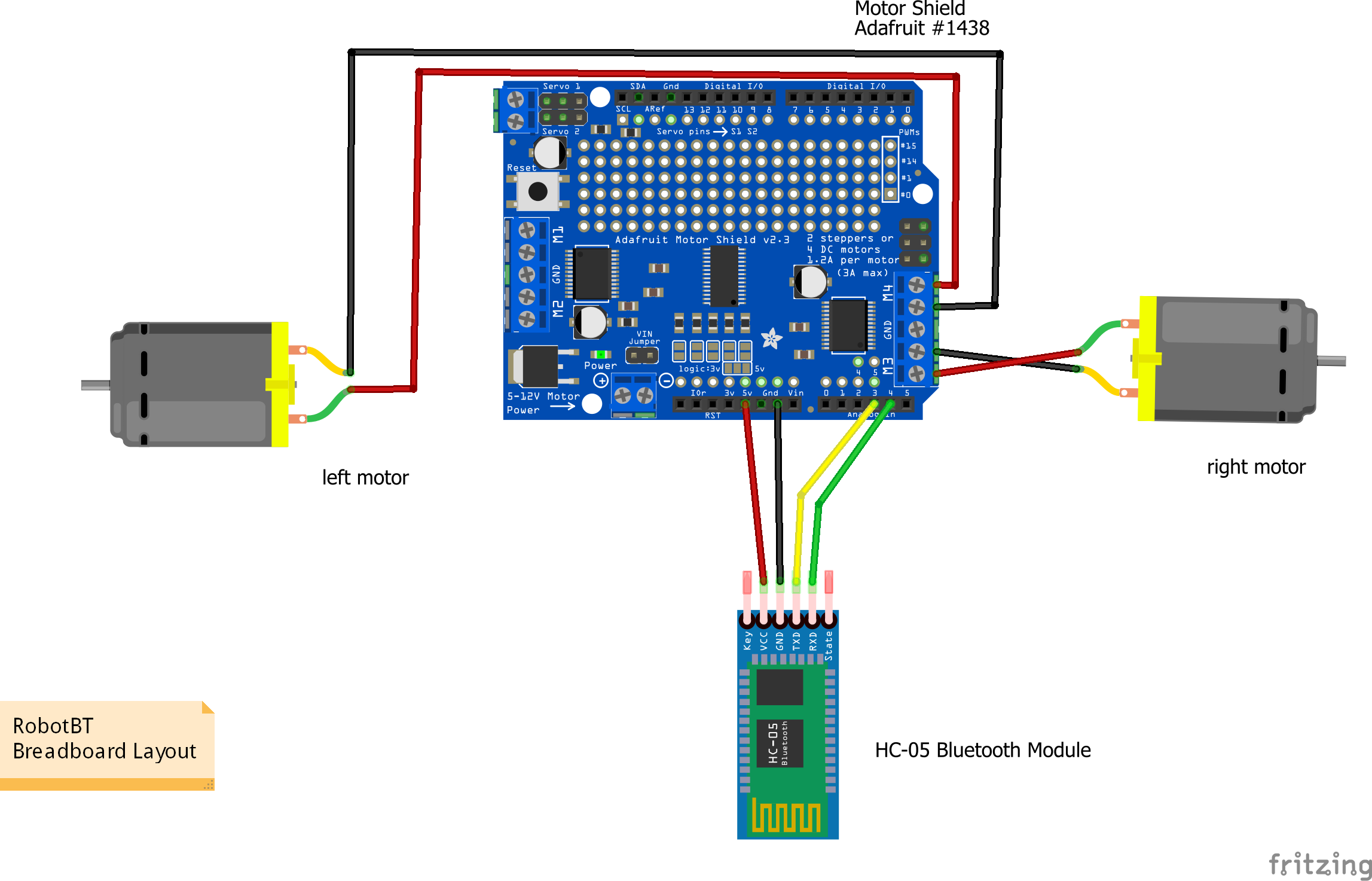
We will be making use of the HC-05 Bluetooth Module to receive data sent from the smartphone. The data received are in form of characters that enable us to change the direction of our car.
The Motor Shield used in this project is the Adafruit Motor Shield. It is stacked on the Arduino. It is used to drive the DC motors because the Arduino alone cannot drive them. It is advisable to use a power supply with good current rating(e.g 12V). This helps in giving your Robot Car traction on any surface you place it.
You may need to solder some headers to the Motor Shield. We made use of analog pins A3 and A4 as the Rx and Tx pins respectively.
About the AppTo control the Car from my smartphone, I designed an App using MIT App inventor. The App was named 'RobotBT'. A screenshot of the app is shown below
In order to use the App, the following steps are required:
- Pair your smartphone with the HC-05 Bluetooth Module. A pin would be required. The default pin is 1234.
- After pairing, launch the RobotBT app
- Click on the Bluetooth icon to connect to the HC-05 Bluetooth Module.
- Once you are connected, the label below the Bluetooth icon will change to 'Client connected'.
- You are now ready to control your Robot Car using the RobotBT App.
To download the RobotBT app, click the link below:
RobotBT download
Coupling PhaseThe following steps are required to couple the 2WD Robot Car:
- Attach the speed encoders to the DC Motor.
- Attach the Arduino Uno to the Chassis base
- Connect the connectors to the rear castor
- Mount the rear castor under the chassis base
- Attach the DC Motors to the Chassis base.
- Attach the wheels to the DC Motors.
- Mount the motor shield on the Arduino.
- Attach the wires from the DC Motors to the motor shield.
- Connect the Arduino to the power source.

_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










{kind=link}
Comments