What is the robot car?
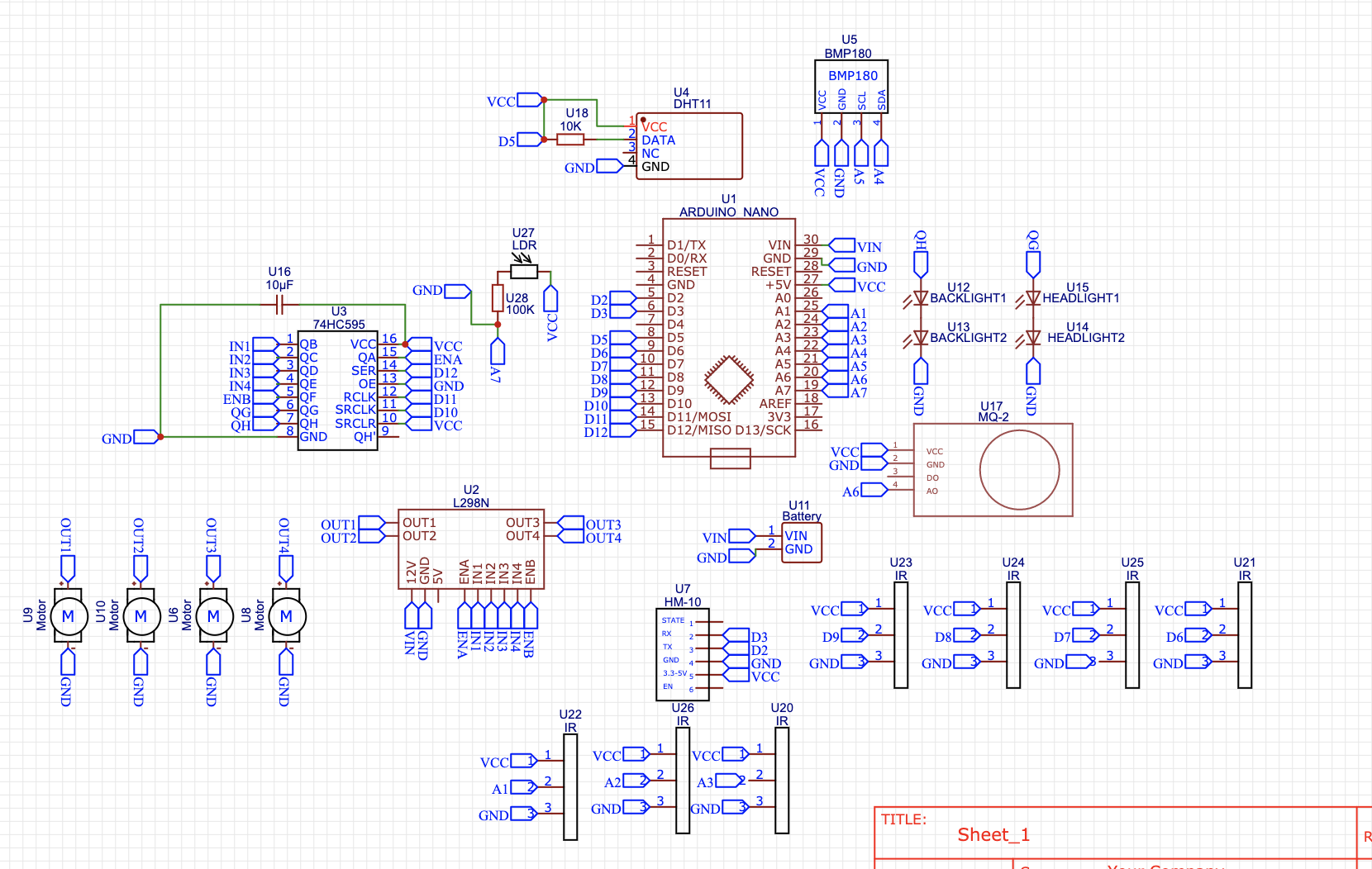
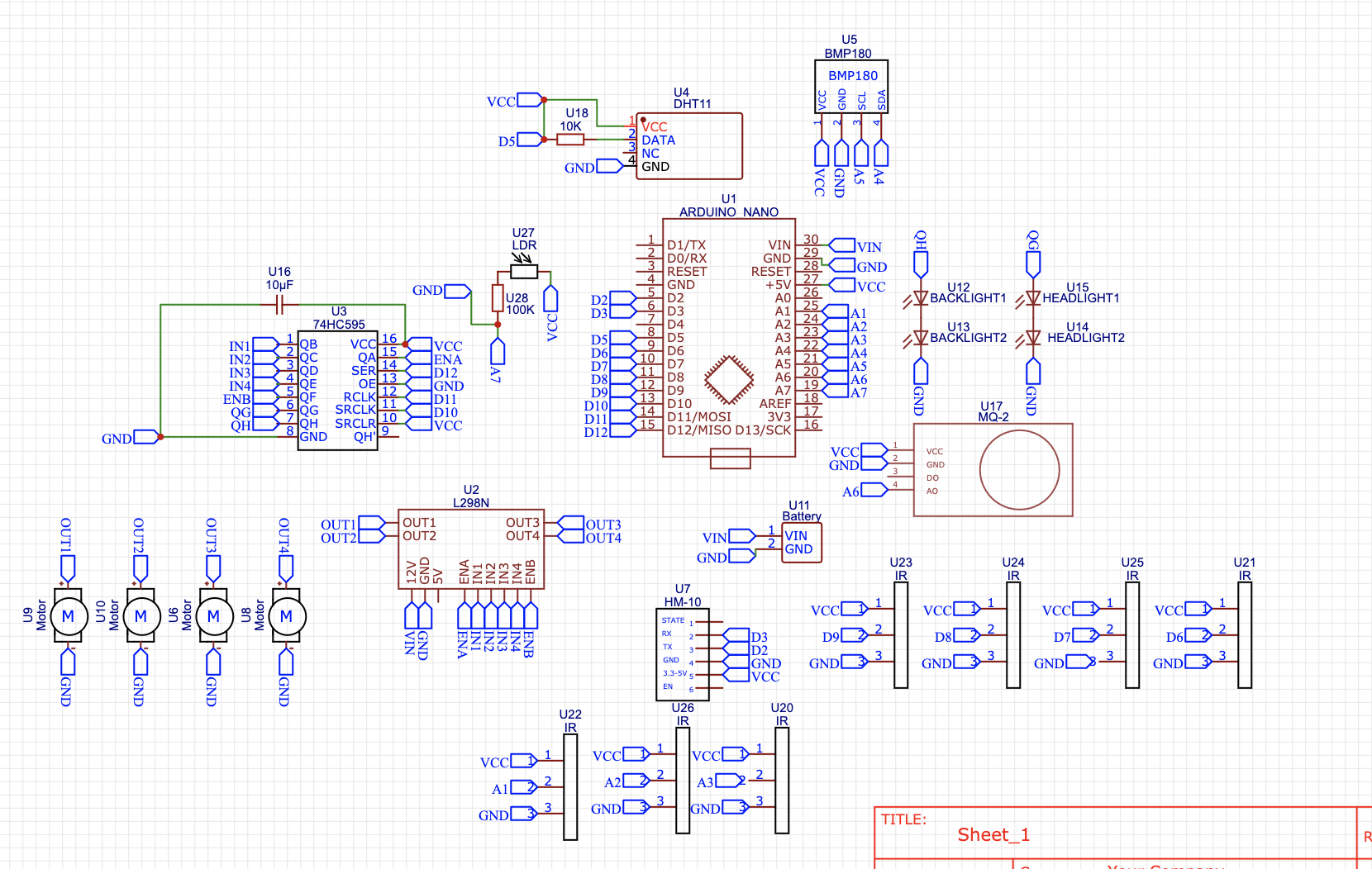
A fun to build and interactive robot car, capable of sending data about your surrounding environment to your very smartphone, they include: temperature, pressure, humidity, gas, and light readings. The car's H-Bridge is controlled by a shift register to minimise the used GPIO pins to maximise the ability to have more sensors. It also has obstacle detection and lift detection by using IR sensors, however ultrasonic sensors may be reliable and so I have left two digital pins plus the extra GPIO pins from the IR sensor's pins so that there is still a challenge for you to complete. If you want however, you can easily remove this functionality by deleting the function/procedure from the loop.
How does the car work?
The inner workings of the car's components are already documented in large amounts online, so if you are curious there are far better tutorials than I could ever include in this project description. The code is quite simple, and is mostly lots of sensor code mashed together, but if there are any problems, both hardware and software, be sure to leave a comment and I'll try to help sort your problem.
A main problem to consider is if you have a different bluetooth module that is not the HM-10, I would assume to change the baud rate in the code to the sensor you are using.
For the shell of the car, I had old parts from an elegoo robot car kit, so I do not have an included CAD model for 3D printing, but just make some rectangles with screw holes, and spacers and you should have your own robot car shell in no time.
Inspiration
The project is largely inspired by the beast of engineering Perseverance rover, despite this tiny car being nothing in comparison, I thought it would nice for us to have something to show some celebration of it.
I hope you have fun building it!
Link to YouTube video: https://www.youtube.com/watch?v=U7NQchaqekI




















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
Comments