


Hardware components | ||||||
| × | 2 | ||||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
I was inspired to create Seat Sentry due to years of:
A. Being called out by my sisters, mom, and girlfriend for forgetting to put the seat down after using it (I know, very un-gentlemanly of me).
B. Being annoyed at my even less tidy roommates leaving the seat down even during use (#1 obviously!) and making a mess. Gross.
So, being the lazy engineering student I am, I decided to automate this up/down battle and eliminate some headache for myself and my female friends and family.
*An added bonus is the Seat Sentry can be setup to control the raising and lowering of the toilet lid instead of the seat which can keep pesky kids and pets out of the toilet water.
How it WorksThe function of this project is actually very simple. While the system shown here is a proof of concept, the fully implemented Seat Sentry uses an IR range sensor mounted and directed across a bathroom doorway to detect when someone enters or leaves. This powers the motors (mounted on the tank of the toilet) to raise or lower the toilet seat by retracting or paying out a spool of string attached to the toilet seat.
BuildThis project was made possible by the generous and tireless help of the manager, instructor, wizard, robot master of the UIUC Control Systems Laboratory: Dan Block. The TA staff were also endlessly helpful in this project.
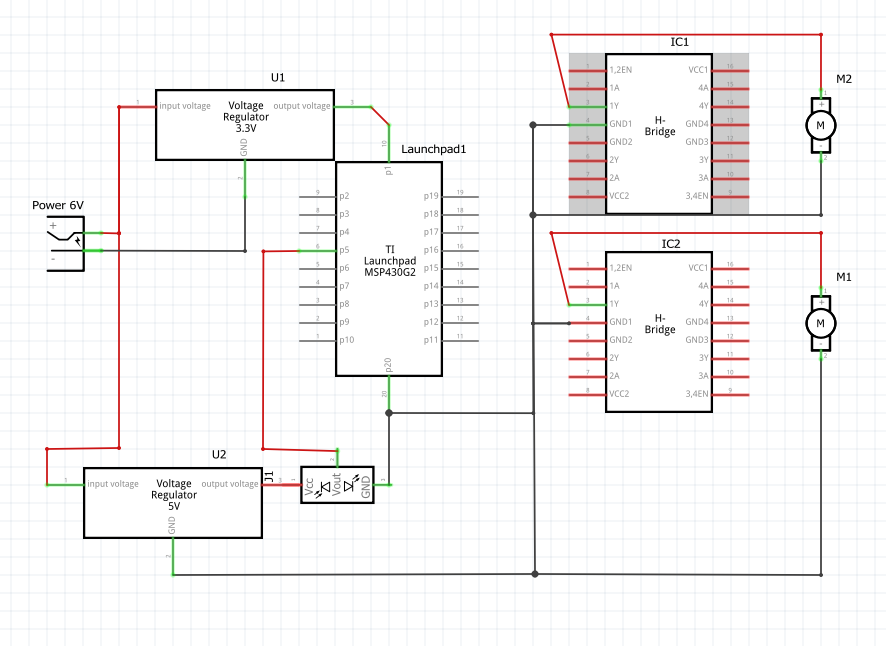
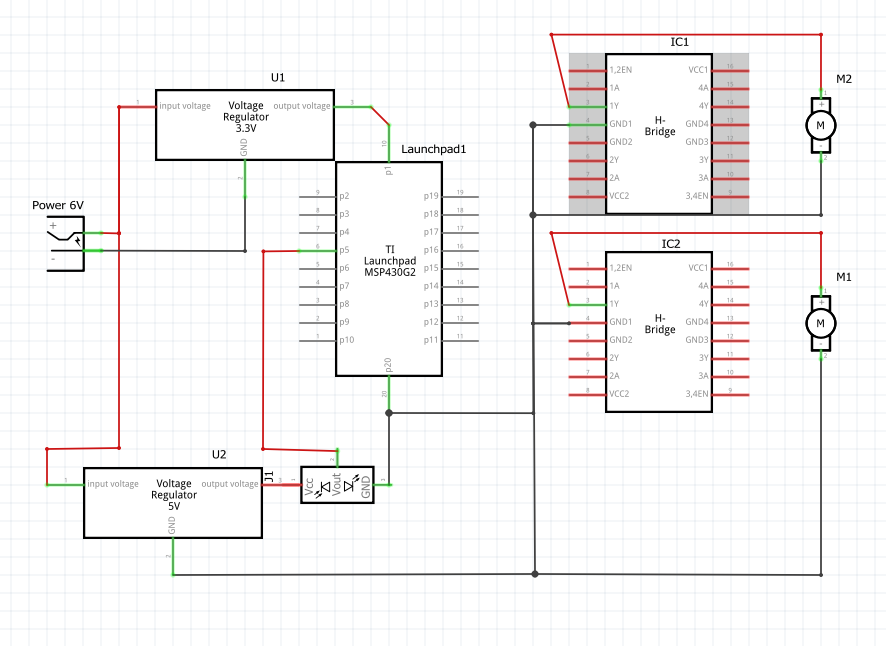
The hardware development platform for Seat Sentry is the Texas Instruments MSP430G2553 processor and Launchpad which were generously provided through the mechatronics course (SE 423) I am taking this semester with Dan. I was able to interface with the IR range sensor as an input to my motor control scheme which actuates the motors when someone passes through the bathroom doorway.
The logic of this process is handled by the C code which is flashed to the MSP430G2553. A simple switch case is setup to control raising time, lowering time and waiting between doorway threshold senses. Make sure to reference MSP430 documentation from TI to understand the necessary support files and installations.
ResultsSee for yourself!
As you can see the general logic and hardware control are working as expected and the project can be further scaled to a working model mounted to a real toilet somewhere out there in the world!





{kind=link}
Comments