


Hardware components | ||||||
 |
| × | 1 | |||
This is a camera mount controlled by smartphone via Bluetooth Low Energy.
Set azimuth and tilt angle value from smartphone, then camera mount moves appropriate position. These data are transmitted through characteristics in BLE.
Application on the smartphone doesn't need to control this, but I wrote an application using Android Studio and Bluetooth Developer Studio(BDS) for my convenience. BDS generates complete application code, that makes much easier than write from scratch.
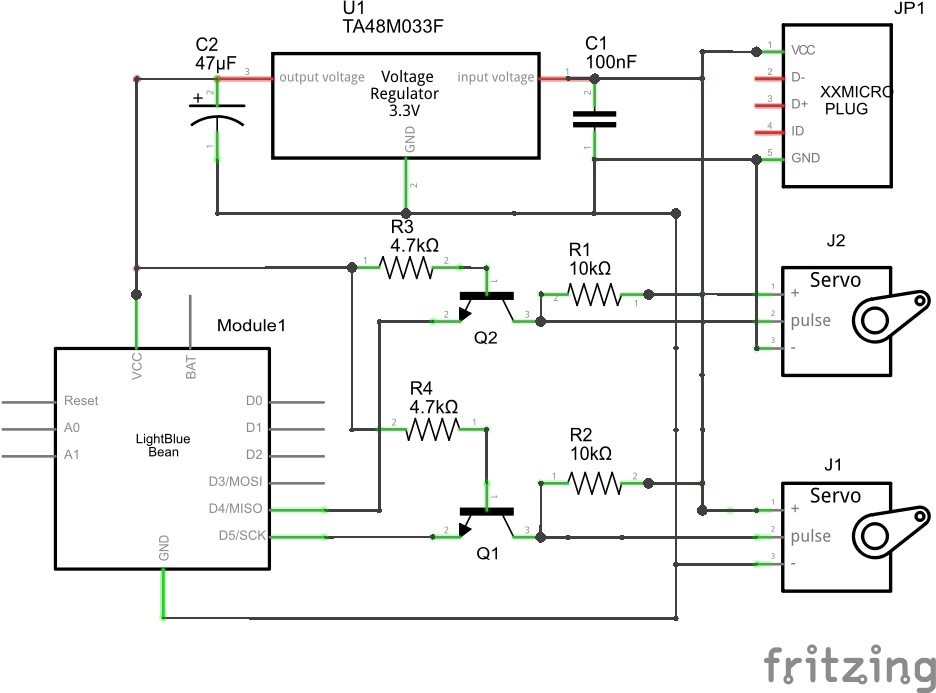
Key point of this project is voltage. Servo motor I use are SG90, which operate at 5V. But BLE module (LightBlue Bean) operate at 3V. I must make 3V from 5V power supply and change signal levels.




{kind=link}
Comments