


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
For the legions of us who work at desks day in and day out posture problems can be a real pain in the derrière. Various gadgets out there address this issue by constantly reminding their users to sit up right, but they too can be a pain thanks to their tediousness. so I built a posture corrector robot.
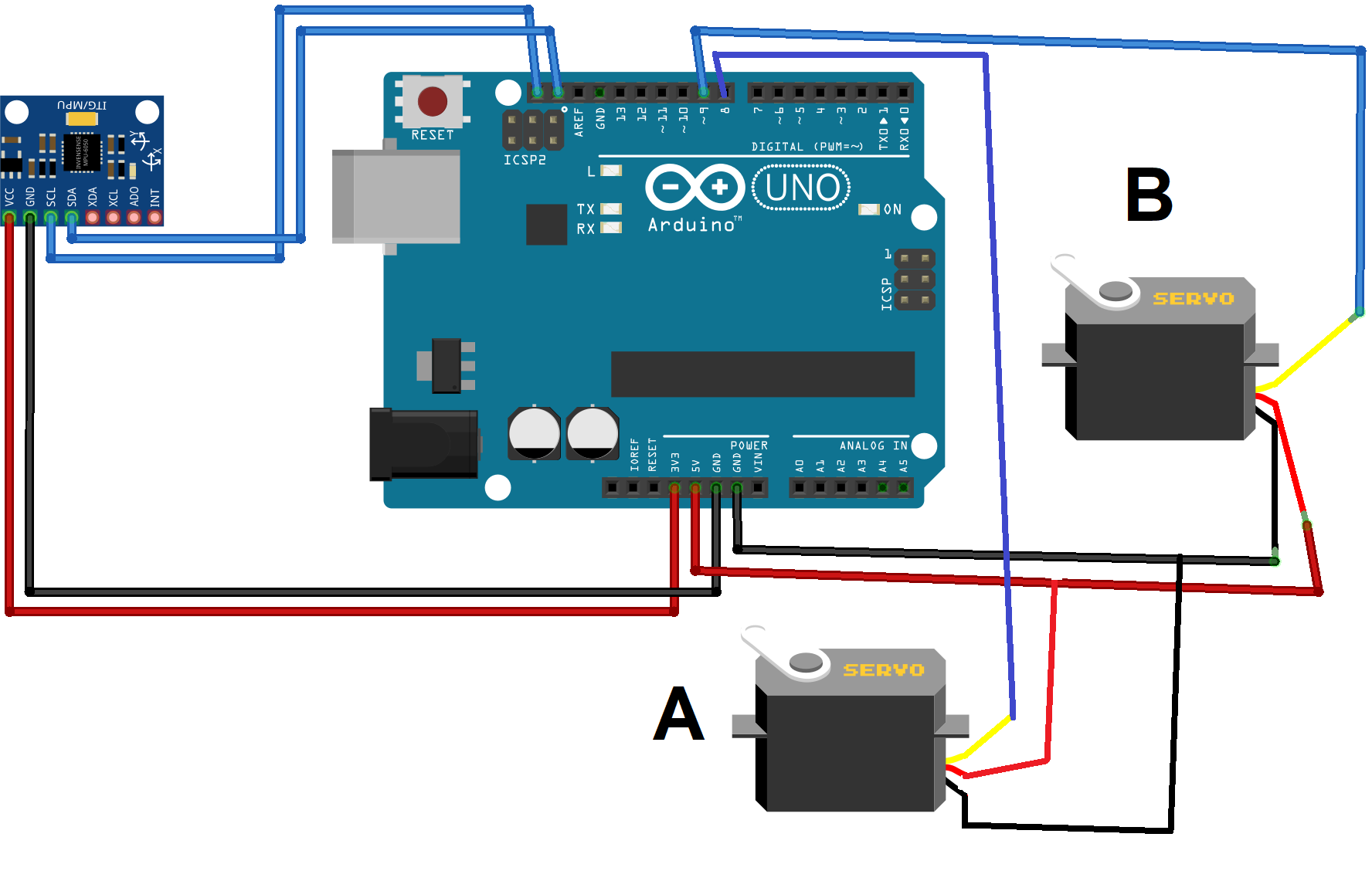
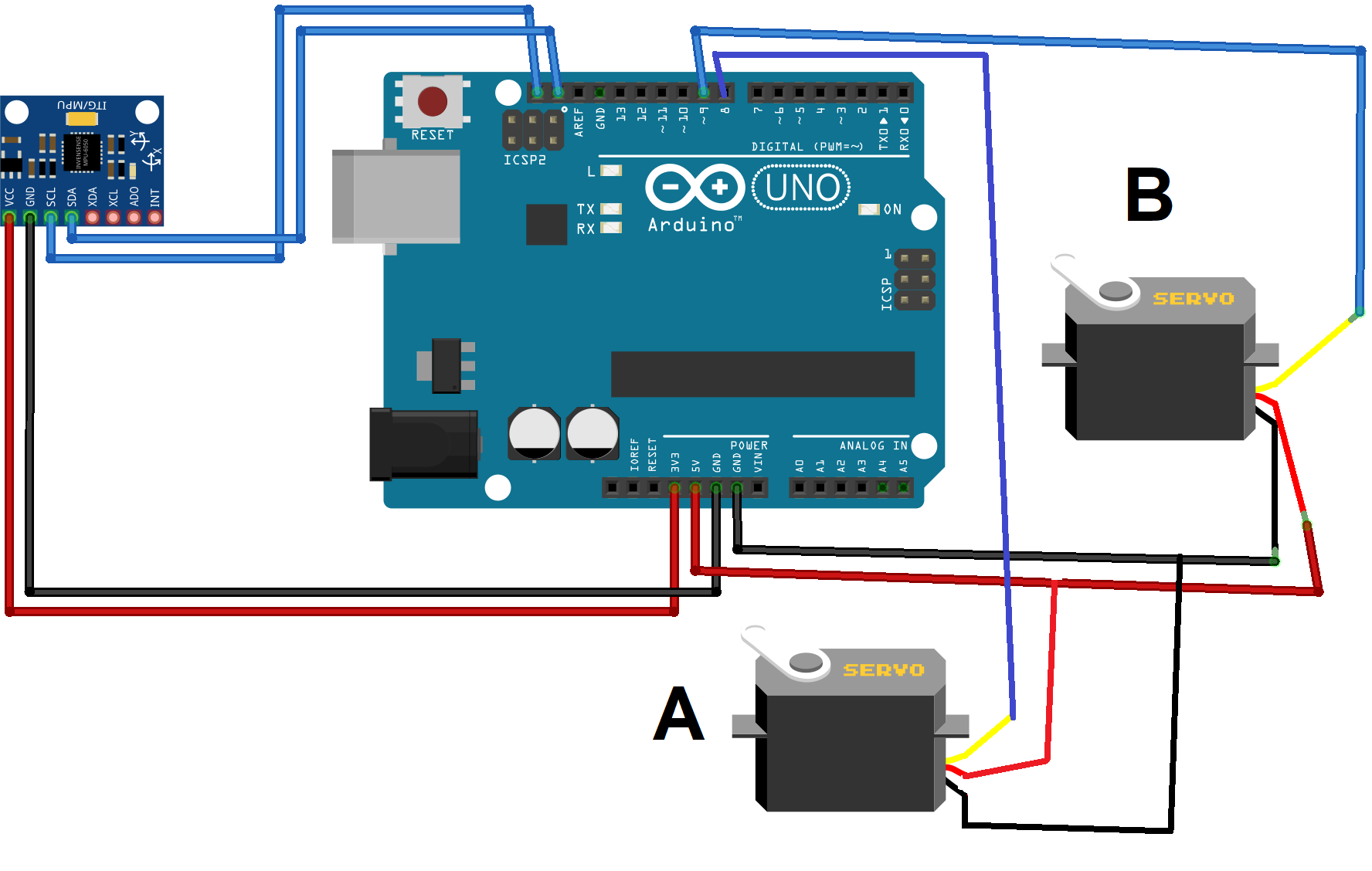
in this project I used an Arduino Uno, mpu6050 and 2 servo Motors.mpu6050 sensor attaches to a person and when he/she hunch The robot arm corrects the person's posture.
MPU-6050 is a low-cost, highly accurate inertial measurement unit (IMU) with six degrees of freedom (DOF). IMUs can measure acceleration, inertia and a number of other parameters to allow you to determine their spatial position and velocity.MPU-6050 is capable to send data in i2c protocol. (SCL & SDA pins)
SG90 is a 180° rotation servo. Servo motors works on PWM (Pulse Width Modulation) signal.
mpu6050 sensor attaches to person shoulder and when he/she hunch, roll variable gets more than than 55 degree so Arduino sends signal to the servos to raises the robot arm and corrects the person posture. And after 1 second goes back to first position.
I have also posted this project to PCBWay community, here is the link:
https://www.pcbway.com/project/shareproject/Posture_Corrector_Robot_1e1bb7de.html





{kind=link}
Comments