//
// updated 2023.03.23
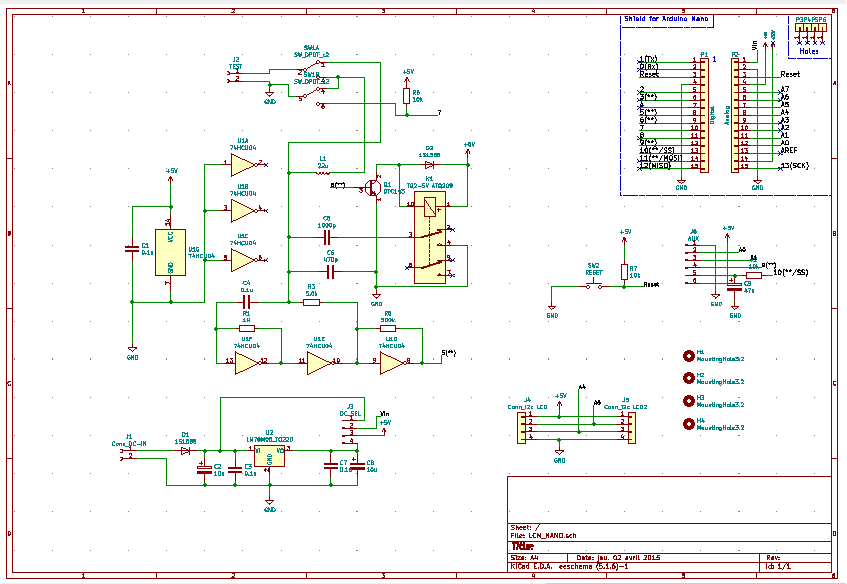
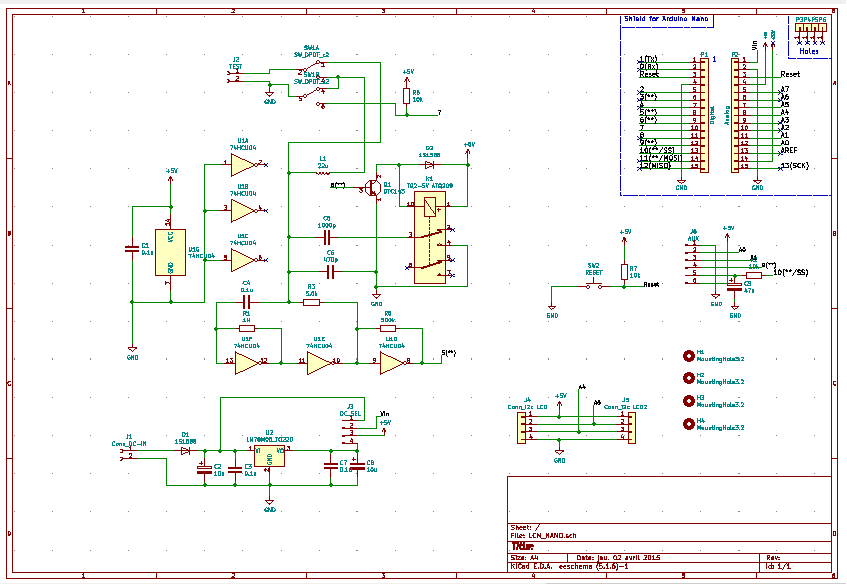
// Arduino LC meter V2.42
//
// D5:FRQ input, D6:Driving the relay, D7:L/C select PINMODE setting
//
// Thanks for Teensy-based project to refer FreqCount Library.
// https://www.pjrc.com/teensy/td_libs_FreqCount.html
#include <FreqCount.h>
#include <Wire.h>
// i2c lcd instance
// Thanks for giving information about i2c LCD adapter
// https://github.com/marcoschwartz/LiquidCrystal_I2C
#include <LiquidCrystal_I2C.h>
int PIN_Led = 13; // Gate timing LED lit port
boolean LED_Stat = 1; // Gate ON/OFF timing LED
int SEL_SW = 7; // L/C select SW
boolean SEL_SW_Stat = 1;
int CAL_ON = 6; // Caliblation relay
int ON = 1;
int OFF = 0;
int f3_SW = 8; // f3 display select SW
// initialize Serial, i2cLCD, PCF8574
LiquidCrystal_I2C lcdi2c(0x27,16,2); // Adress*0x27, 16 columns, 2 lines
volatile unsigned long freq_d;
volatile unsigned long freq;
volatile boolean err;
char charbuf[16]; // Character array for sprintf function
char unitbuf[] = {"pF "};;
char set_msg[14];
char set_C[] = {" SetCapacitor"};
char set_L[] = {" Set Inductor"};
volatile unsigned char i, l_power, l_digi, l_unit, c_power, c_digi, c_unit;
volatile unsigned long freq1, freq2, freq3;
volatile float c_int, l_int, l_inv, f_sq;
volatile float c_cal=1.000e+3;
volatile float test_value;
volatile unsigned long freq_count() // Get average from double counting
{
delay(800); // Wait settling v2.41
FreqCount.begin(200); // Start counting with gatetime of 200ms
while (FreqCount.available() == 0); // wait until counter ready
freq_d = 5*FreqCount.read(); // read result of 200mS window
Serial.println(freq_d); // 2023.02.26 print freq_d@1000ms
if(freq_d<2000) err=1; // ?? too low, less than 2kHz
return freq_d; //
}
float freq_cal(unsigned long f1, unsigned long f2){
// Coefficient calculating
return((float)(f1)/(float)(f2)*(float)(f1)/(float)(f2)-1);
}
void LCDSetCursor( int column, int line )
{
lcdi2c.setCursor( column, line ) ;
}
void LCDPuts( char *const s )
{
lcdi2c.print( s ) ;
}
void setup() {
Serial.begin(9600); // connect to the serial port
Serial.println("LCM on i2cLCD v2.42"); // Version 2.0
pinMode(PIN_Led, OUTPUT);
pinMode(SEL_SW, INPUT);
pinMode(CAL_ON, OUTPUT);
pinMode( 2, OUTPUT); // To stabilize
pinMode( 3, OUTPUT);
pinMode( 4, OUTPUT);
pinMode( f3_SW, INPUT_PULLUP);
digitalWrite( 2, 0);
digitalWrite( 3, 0);
digitalWrite( 4, 0);
// PCF8574 LCD
// Iniatilize i2c LCD
lcdi2c.init();
lcdi2c.backlight();
delay(100);
// Write
LCDSetCursor(0,0) ; // Starting point [00H]
LCDPuts("LCM METER v2.42") ; //
LCDSetCursor(0,1) ; // 2nd line [40H]
LCDPuts("Let calibrate ") ; //
}
void loop()
{
// START SWITCH CHECK
// If calibration
Serial.println("WAIT SEL SW ON");
while( digitalRead(SEL_SW) == 0 ){ } // CAL switch check
delay(20);
while( digitalRead(SEL_SW) == 0 ){ } // Check again
delay(200);
/* Get frequency 1 and display */
Serial.println("SEL SW ON");
freq1=freq_count(); // F1 get
// result is based on 1000ms gate
Serial.println("F1 gotten");
Serial.println(freq1);
LCDSetCursor(3,0) ; // Display position set on 4th column
LCDPuts(" f1=");
sprintf( charbuf,"%ld", freq1, 7);
LCDPuts(charbuf);
LCDPuts("Hz "); //
// Relay on f2 getting
digitalWrite( CAL_ON, ON); // Calibration capasitor on
delay(200); // Wait 200ms
freq2=freq_count(); // Get F2
digitalWrite( CAL_ON, OFF); // Calibration capasitor off
Serial.println("F2 gotten");
Serial.println(freq2);
/* F2 displaying */
LCDSetCursor(0,1); // Move cursur to the top of 2nd line
LCDPuts("f2=");
sprintf( charbuf,"%ld", freq2, 7);
LCDPuts(charbuf);
LCDPuts("Hz "); //
delay(50);
/* Calculating C and L */
c_int=(float)(c_cal)/freq_cal(freq1,freq2);
// Calcurate c_int from F and F2 pF
f_sq=(float)(freq1)*(float)(freq1)/+1.000E+2;
// (F1*F1)
Serial.println("freq_cal= ");
Serial.println(freq_cal(freq1,freq2));
l_inv=(+3.9438E+1)*f_sq*c_int; //
l_int=(+1.000E+16)/l_inv; // uH
/* for debugging */
Serial.println("C/L unit gotten");
Serial.println("C=");
Serial.println(c_int);
Serial.println("L=");
Serial.println(l_int);
LCDSetCursor(0,1); // Move cursur to the top of 2nd line
LCDPuts("C=");
sprintf( charbuf,"%d", (int)c_int);
LCDPuts(charbuf);
LCDPuts("pF "); //
LCDPuts("L=");
sprintf( charbuf,"%d", (int)l_int);
LCDPuts(charbuf);
LCDPuts("uH "); //
// Calibration finished
Serial.println("Calibration end ");
LCDSetCursor(3,0) ; // Move cursur to the 4th of 1st line
LCDPuts(" Calibrated ");
delay(1000);
// Measurement starting check
while( digitalRead(SEL_SW) == 1 ){ } // Wait sw status changed
while (1) // Testing forever
{
digitalWrite(PIN_Led, LED_Stat=!LED_Stat); // LED on/off
delay(100);
LCDSetCursor(4,0); // Move cursur to the 4th of 1st line
if(digitalRead(SEL_SW) == 0) // If SW==0, Ask L measuring
{ // L position
LCDPuts( "Set Inductor"); // Set inductor
}
else{ // C position
LCDPuts( "SetCapacitor" ); // Ask setting C
}
delay(300);
freq3=freq_count(); // Get F3
Serial.println("F3 gotten");
Serial.println(freq3);
LCDSetCursor(3,0); // Move cursur to the top of 2nd line
if ( digitalRead(f3_SW) == 1)
{ // f3_SW on
LCDPuts(" f3=");
sprintf( charbuf,"%ld", freq3, 7);
LCDPuts(charbuf);
LCDPuts("Hz "); //
}
else
{
LCDPuts(" ");
}
delay(100);
/* displaying value */
LCDSetCursor(0,1); // Move cursur to the top of 2nd line
l_power=1;
l_digi=1;
l_unit='u';
c_power=1;
c_digi=0;
c_unit='p';
/* Calculating value whether C position or L */
if(digitalRead(SEL_SW) == 0) // If SW==0, start L measuring
{ // L position
if ( freq3> 1000 ){
test_value= ((freq_cal(freq1,freq3))*l_int);
int f_rate = (freq_cal(freq1,freq3)*1000);
Serial.println("f_rate");
Serial.println(f_rate);
// test_value unit is uH, if test_value < 1, nH used
unitbuf[1] = 0x48 ; // H
if ( test_value < 1 ){
unitbuf[0] = 0x6E ; // nH
test_value = test_value * 1000 ;
}
else if ( test_value < 1000 ){
unitbuf[0] = 0x75 ; // uH
}
else {
unitbuf[0] = 0x6D ; // mH
test_value = test_value / 1000;
}
LCDPuts("L=");
dtostrf( test_value, 4, 1, charbuf); // Changed to use dtostrf(**)
LCDPuts( charbuf );
LCDPuts( unitbuf );
LCDPuts( " ");
Serial.println("L=");
Serial.println( test_value);
Serial.println("uH");
}
else {
LCDPuts(" No inductor ") ;
Serial.println( " No inductor ");
}
}
else
{
test_value=((freq_cal(freq1,freq3))*c_int/c_power);
Serial.println("C=");
Serial.println( test_value);
Serial.println("pF");
unitbuf[1] = 0x46 ; // F
if ( test_value < 1000 ){
unitbuf[0] = 0x70 ; // pF
}
else if ( test_value < 1000000 ){
unitbuf[0] = 0x6E ; // nF
test_value = test_value / 1000 ;
}
else {
unitbuf[0] = 0x75 ; // uF
test_value = test_value / 1000000 ;
}
LCDPuts("C=");
dtostrf( test_value, 4, 1, charbuf); // Changed to use dtostrf(**)
LCDPuts( charbuf );
LCDPuts( unitbuf );
LCDPuts( " ");
}
delay (500);
}
}








{kind=link}
Comments