
Hardware components | ||||||
 |
| × | 1 | |||
| × | 3 | ||||
| × | 3 | ||||
 |
| × | 6 | |||
 |
| × | 7 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
This project is about the development of an electro-pneumatic circuit for the control of a soft robot.
Soft Robotics is the specific subfield of robotics dealing with constructing robots from highly compliant materials, similar to those found in living organisms. [wikipedia]
The actual soft robot for which I have done this project is a small part of a bigger system that is under patent protection; this is why I have used balloons in all the photos/videos here.
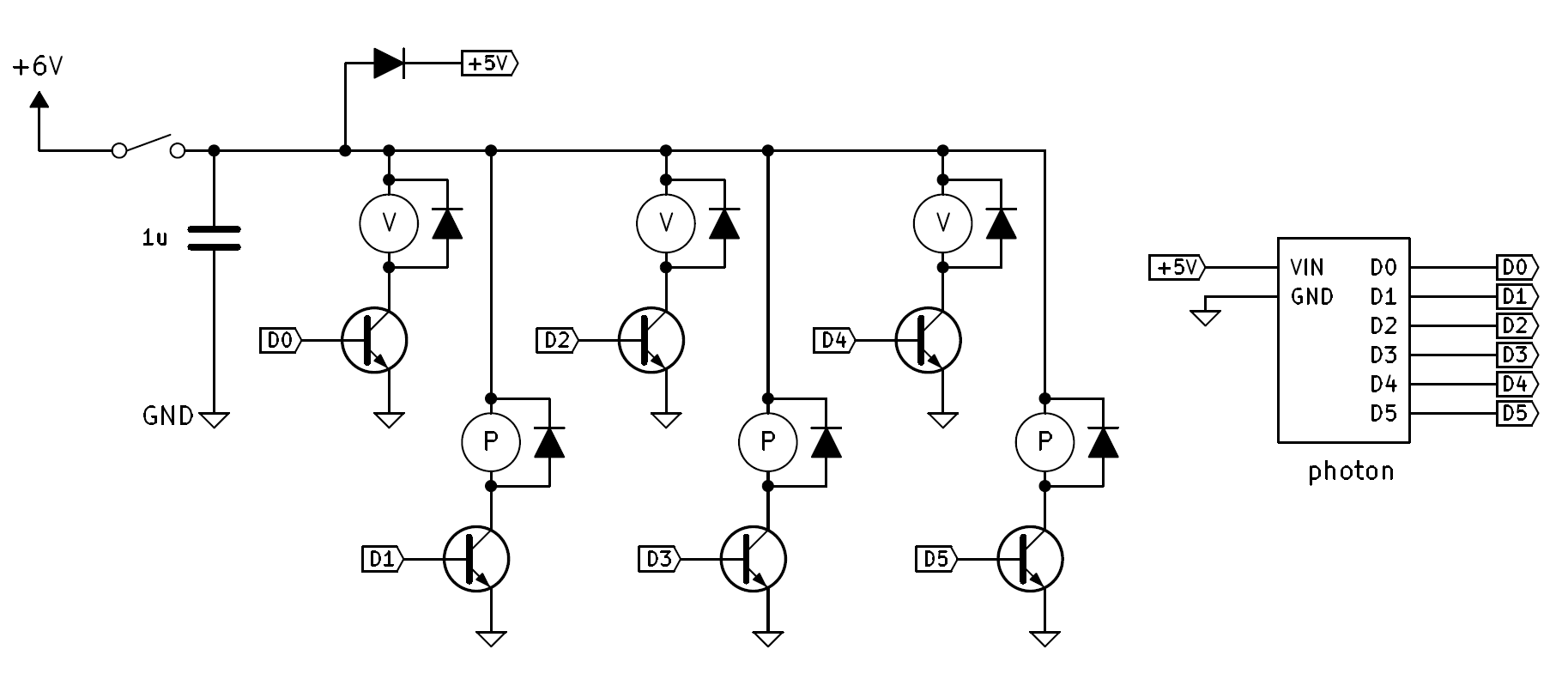
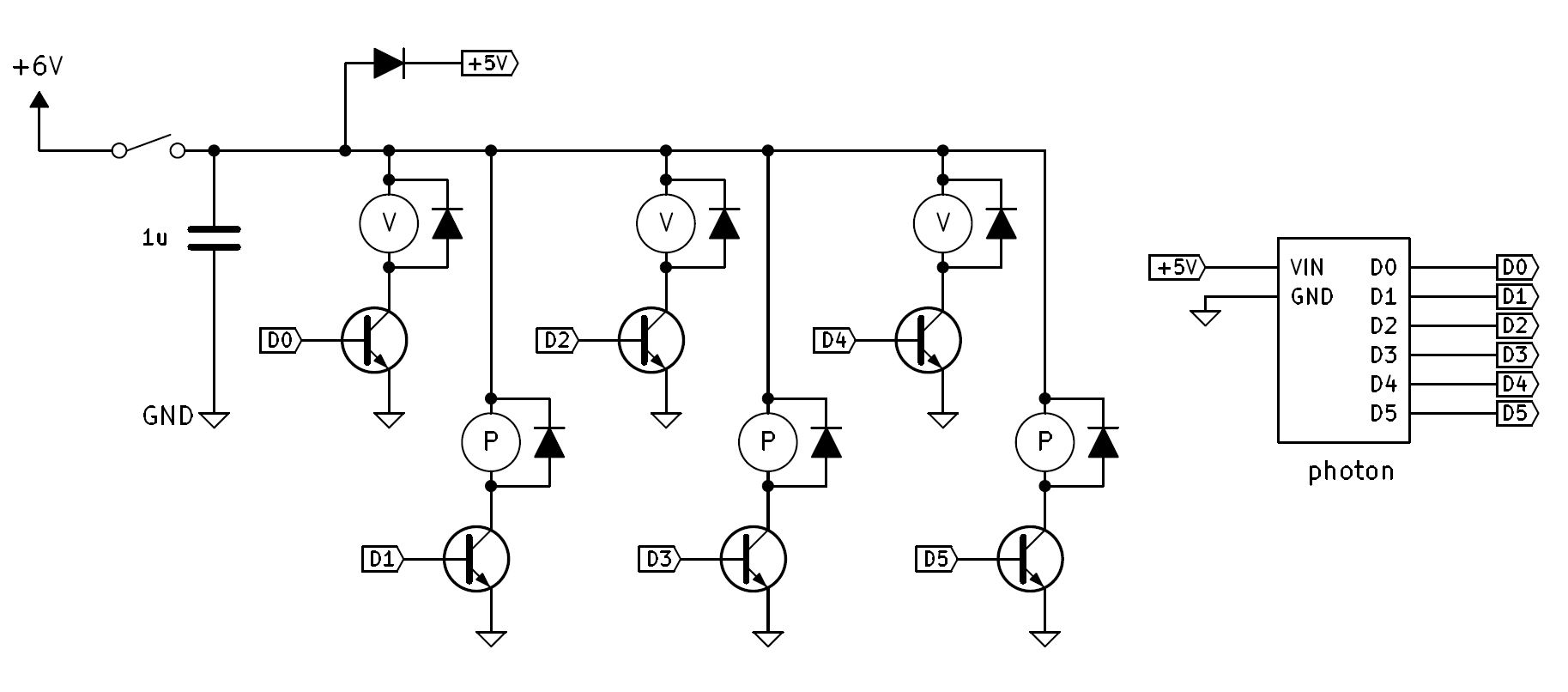
The system allows inflating and deflating up to three soft pneumatic actuators independently switching the air pumps and the 3-way solenoid valves. The circuit design is highly modular, and it can be easily extended to enable the control of more actuators.
The actuation pattern can be selected remotely via a PC or a smartphone thanks to the Zerynth App.
Hardware Set up1. Connect each air pump to the normally open port of a valve, and each actuator to the common port of a valve. The normally closed ports will be used as an outlet to passively deflate the actuators.
2. To switch on and off each pump and valve, use an NPN transistor as a low-side switch. Also place a flyback diode at each pump and valve to protect the circuit! See the schematic for more details.
3. Connect the transistors' bases to digital pin of the Photon. I have used pins D0 to D5.
4. Provide a proper power supply to the pumps, the valves and the microcontroller. I used an old 6V DC charger to power directly the pumps and the valves. To get the 5V needed for the Photon I just added a diode.
Programming the deviceTo program the board download and install Zerynth Studio from www.zerynth.com/zerynth-studio/.
Plug the Photon to your pc, then register and virtualize the board. From the "Connected Device" tab, click on "Add a device": uid and token must be copied and pasted into the code. Click on "set template" (plus icon), then on "create a new one" and on "update": use the template.html file posted below.
Finally, paste the code in the IDE, set wifi and Zerynth App variables, and uplink the code to the board. Now you can control the actuation pattern using the html template from your PC, tablet or smartphone through the Zerynth App.
Take a look at this step-by-step tutorial to see how to get started with the Zerynth App: link.
Here are two projects where you can find more info about how the Zerynth App works and get inspired:






{kind=link}
Comments