

Hardware components | ||||||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
Certainly, here's a professional version of your description:
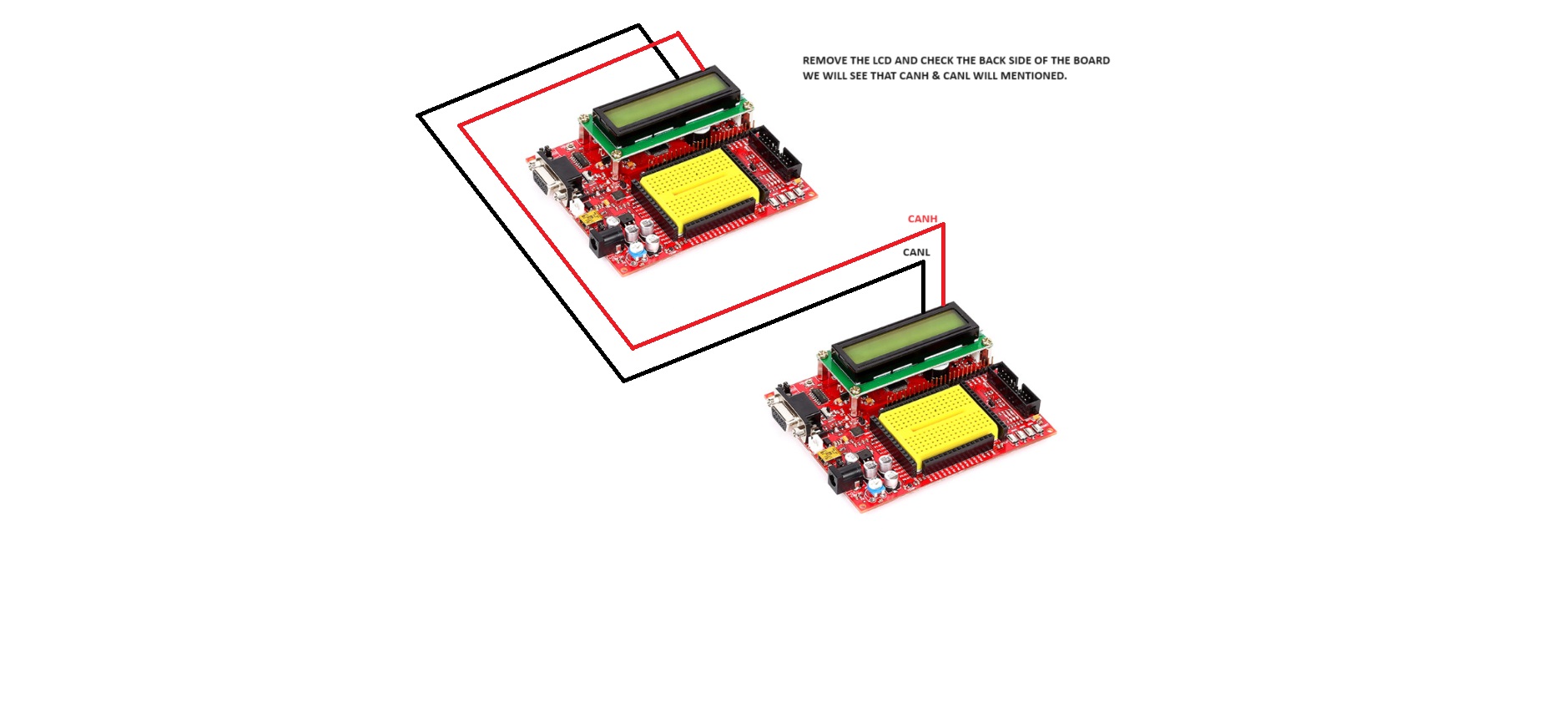
"I was responsible for the integration of two LPC2129 32-bit microcontrollers manufactured by NXP Semiconductor in a recent project. Within this project scope, my primary focus was on the implementation of functionalities pertaining to Side-light and Head-light operations.
Specifically, I replicated the functionality of real-world automotive lighting systems, encompassing side light indicators, parking lights, and headlight functionalities. This involved meticulous coding to emulate the behavior of these automotive lighting components accurately.
Furthermore, a critical aspect of my contribution involved the implementation of an Acceptance Filter Setting within the codebase. This feature enabled the microcontrollers to discern and selectively process incoming data frames based on specific identifiers. Consequently, data frames not meeting the defined criteria were disregarded. Additionally, I configured the Remote Transmission Request (RTR) bit within the data register to ensure that only data frames, rather than remote frames, were accepted, thus enhancing the precision of data processing."
#include <LPC21xx.H>
#include "header.h"
#define LED 1<<17 //left-indecator
#define LED1 1<<19//right-indecator
#define LED2 1<<18//head-light
unsigned int flag=0,lif=0,rif=0,hif=0;
CAN1 v1;
unsigned char left[]={0,0,0x04,0x08,0x1F,0X08,0X04,0};
unsigned char right[]={0,0,0x4,0X2,0X1F,0X2,0X4,0};
unsigned char head1[]={0X18,0X14,0X12,0X11,0X11,0X12,0X14,0X18};
unsigned char head2[]={0x1F,0,0x1F,0,0x1F,0,0x1F,0};
unsigned char clear[]={0,0,0,0,0,0,0,0};
int main()
{
can1_init();
IODIR0=LED|LED1|LED2;
IOSET0=LED|LED1|LED2;
lcd_init();
can1_interupt_init();
config_vic_CAN();
lcd_cgram1(left); // page:0 && left-indecator
lcd_cgram2(right);// page:1 && right-indecator
lcd_cgram3(head2);// page:2 && Head-light
lcd_cgram4(head1);// page:3 && Head-light
lcd_cgram5(clear);// page:4 && clear
lcd_cmd(0xC1);
lcd_string("CAR DASHBOARD");
while(1)
{
lcd_cmd(0xC1);
lcd_string("CAR DASHBOARD");
L1:
if(flag==1 && v1.rtr==0)
{
flag=0;
if(v1.id==0x3F0 && v1.byteA==0x13)//left-indecator on
{
L2:
rif=0;
lif=1;
IOSET0=LED1;//right off;
while(1)
{
IOCLR0=LED;
lcd_cmd(0x83);
lcd_data(0);
delay_ms(100);
IOSET0=LED;
lcd_cmd(0x83);
lcd_data(4);
delay_ms(100);
if(v1.id==0x3F0 && v1.byteA==0x14)//left-indecator off
{
lif=0;
IOSET0=LED;
if(hif==1)
{
lcd_cmd(0x83);
lcd_data(4);
}
else
{
lcd_cmd(0x01);
}
break;
}
if(v1.id==0x3F6 && v1.byteA==0x30)//Head-light on
{
IOCLR0=LED2;
lcd_cmd(0x87);
lcd_data(2);
lcd_cmd(0x88);
lcd_data(3);
hif=1;
}
if(v1.id==0x3F6 && v1.byteA==0x31)//Head-light off
{
IOSET0=LED2;
lcd_cmd(0x87);
lcd_data(4);
lcd_cmd(0x88);
lcd_data(4);
hif=0;
}
if(v1.id==0x3F1 && v1.byteA==0x15)//Right Indecator on
{
lif=0;
rif=1;
IOSET0=LED;
while(1)
{
IOCLR0=LED1;
lcd_cmd(0x8C);
lcd_data(1);
delay_ms(100);
IOSET0=LED1;
lcd_cmd(0x8C);
lcd_data(4);
delay_ms(100);
if(v1.id==0x3F1 && v1.byteA==0x16)//Right Indecator off
{
rif=0;
IOSET0=LED1;
if(hif==1)
{
lcd_cmd(0x8C);
lcd_data(4);
}
else
{
lcd_cmd(0x01);
}
goto L1;
}
if(v1.id==0x3F6 && v1.byteA==0x30)//Head-light on
{
IOCLR0=LED2;
lcd_cmd(0x87);
lcd_data(2);
lcd_cmd(0x88);
lcd_data(3);
hif=1;
}
if(v1.id==0x3F6 && v1.byteA==0x31)//Head-light off
{
IOSET0=LED2;
lcd_cmd(0x87);
lcd_data(4);
lcd_cmd(0x88);
lcd_data(4);
hif=0;
}
if(v1.id==0x3F0 && v1.byteA==0x13)//left-indecator on
{
goto L2;
}
}
}
}
}
if(v1.id==0x3F0 && v1.byteA==0x14)//left-indecator off
{
lif=0;
IOSET0=LED;
if(hif==1)
{
lcd_cmd(0x83);
lcd_data(4);
}
else
{
lcd_cmd(0x01);
}
}
if(v1.id==0x3F1 && v1.byteA==0x15)//Right Indecator on
{
IOSET0=LED;
rif=1;
lif=0;
while(1)
{
IOCLR0=LED1;
lcd_cmd(0x8C);
lcd_data(1);
delay_ms(100);
IOSET0=LED1;
lcd_cmd(0x8C);
lcd_data(4);
delay_ms(100);
if(v1.id==0x3F1 && v1.byteA==0x16)//Right Indecator off
{
rif=0;
IOSET0=LED1;
if(hif==1)
{
lcd_cmd(0x8C);
lcd_data(4);
}
else
{
lcd_cmd(0x01);
}
goto L1;
}
if(v1.id==0x3F0 && v1.byteA==0x13)//left-indecator on
{
goto L2;
}
if(v1.id==0x3F6 && v1.byteA==0x30)//Head-light on
{
IOCLR0=LED2;
lcd_cmd(0x87);
lcd_data(2);
lcd_cmd(0x88);
lcd_data(3);
hif=1;
}
if(v1.id==0x3F6 && v1.byteA==0x31)//Head-light off
{
IOSET0=LED2;
lcd_cmd(0x87);
lcd_data(4);
lcd_cmd(0x88);
lcd_data(4);
hif=0;
}
}
}
if(v1.id==0x3F1 && v1.byteA==0x16)//Right Indecator off
{
rif=0;
IOSET0=LED1;
if(hif==1)
{
lcd_cmd(0x8C);
lcd_data(4);
}
else
{
lcd_cmd(0x01);
}
goto L1;
}
if(v1.id==0x3F6 && v1.byteA==0x30)//Head-light on
{
IOCLR0=LED2;
lcd_cmd(0x87);
lcd_data(2);
lcd_cmd(0x88);
lcd_data(3);
hif=1;
}
if(v1.id==0x3F6 && v1.byteA==0x31)//Head-light off
{
IOSET0=LED2;
lcd_cmd(0x87);
lcd_data(4);
lcd_cmd(0x88);
lcd_data(4);
hif=0;
}
}
}
}
#include <LPC21xx.H>
#include "header.h"
extern int flag;
extern CAN1 v1;
void can1_init(void)
{
VPBDIV=1;//pclk 60MHz
PINSEL1|=0X14000;
C2MOD=1;//Transmission Request
C2BTR=0X001C001D;//Baud-Rate setting (125 kbps)
AFMR=2;//By-pass filter ON
C2MOD=0;//Reset mode
}
void can1_tx(CAN1 v)
{
C2TID1=v.id; //0x123
C2TFI1=v.dlc<<16; //1
if(v.rtr==0) //1
{
C2TDA1=v.byteA;
C2TDB1=v.byteB;
}
else
{
C2TFI1=(1<<30);
}
C2CMR=1|(1<<5);
while(TCS==0);
}
void can1_rx(CAN1 *ptr)
{
while(RBS==0);
ptr->id=C2RID;
ptr->dlc=((C2RFS>>16)&0XF);
ptr->rtr=((C2RFS>>30)&1);
if(ptr->rtr==0)
{
ptr->byteA=C2RDA;
ptr->byteB=C2RDB;
}
C2CMR=(1<<2);
}
__irq void can1_rx_interupt_handler(void)
{
v1.id=C2RID;
v1.dlc=((C2RFS>>16)&0XF);
v1.rtr=((C2RFS>>30)&1);
if(v1.rtr==0)
{
v1.byteA=C2RDA;
v1.byteB=C2RDB;
}
C2CMR=(1<<2);
flag=1;
VICVectAddr=0;
}
void can1_interupt_init(void)
{
C2IER=1;
}
void config_vic_CAN(void)
{
VICIntSelect=0;
VICVectCntl0=27|(1<<5);
VICVectAddr0=(unsigned int)can1_rx_interupt_handler;
VICIntEnable=(1<<27);
}
#include <LPC21xx.H>
#include "header.h"
#define LED (1<<17)
#include <stdio.h>
void uart0_init(unsigned int baud)
{
unsigned int pclk,res;
int a[]={15,60,30,15,15};
PINSEL0|=0X5;
pclk=a[VPBDIV]*1000000;
res=pclk/(16*baud);
U0LCR=0X83;
U0DLL=((res>>0)&0xFF);
U0DLM=((res>>8)&0XFF);
U0LCR=0X03;
}
void uart0_tx(unsigned char data)
{
while(THRE==0);
U0THR=data;
}
unsigned char uart0_rx(void)
{
while(RDR==0);
return U0RBR;
}
void uart0_tx_string(unsigned char* ptr)
{
while(*ptr!=0)
{
uart0_tx(*ptr);
ptr++;
}
}
void uart0_rx_string(unsigned char*ptr,unsigned int len)
{
int i;
for(i=0;i<len;i++)
{
while(RDR==0);
ptr[i]=U0RBR;
uart0_tx(ptr[i]);
if(ptr[i]=='\r')
{
break;
}
}
ptr[i]='\0';
}
void uart_tx_integer(int num)//123
{
unsigned char a[10];
int i;
for(i=0;num>0;num/=10,i++)
{
a[i]=((num%10)+48);//321
}
for(i=i-1;i>=0;i--)
{
uart0_tx(a[i]);
}
}
void integer_to_hex(unsigned int num)
{
int c=0,d=1,n,n1,n2;
unsigned char s[]="0123456789ABCDEF";
n=num;
for( ;n;n/=10)
{
c++;
}
for( ;c--; )
{
d=d*10;
}
n=num;
while(num) //255
{
n1=num%16;//
n2=num/16;//
if(n1>9)
{
n1=s[n1];
}
else
{
n1=n1+48;
}
if(n2>9)
{
n2=s[n2];
}
else
{
n2=n2+48;
}
num=num/d;
}
uart0_tx_string("0x");
uart0_tx(n2);
uart0_tx(n1);
}
int uart0_atoi(unsigned char*a1)
{
int i,num=0;
if(a1[0]=='-')
{
i=1;
}
else
{
i=0;
}
for( ;a1[i];i++)
{
if(a1[i]>='0' && a1[i]<='9')
{
num=((num*10)+(a1[i]-48));//123
}
else
{
break;
}
}
if(a1[0]=='-')
{
return -num;
}
return num;
}
#include <LPC21xx.H>
#define THRE ((U0LSR>>5)&1)
#define RDR (U0LSR&1)
#define RS (1<<17)
#define RW (1<<18)
#define EN (1<<19)
#define CS (1<<7)
#define SPIF ((S0SPSR>>7)&1)
#define SI ((I2CONSET>>3)&1)
#define SW1 ((IOPIN0>>14)&1)
#define SW2 ((IOPIN0>>15)&1)
#define SW3 ((IOPIN0>>16)&1)
#define TCS ((C1GSR>>3)&1)
#define RBS ((C1GSR>>0)&1)
typedef struct CAN_MSG
{
unsigned int id;
unsigned int byteA;
unsigned int byteB;
unsigned char rtr;
unsigned char dlc;
}CAN1;
extern void uart0_init(unsigned int);
extern void uart0_tx(unsigned char);
extern unsigned char uart0_rx(void);
extern void uart0_tx_string(unsigned char*);
extern void uart_tx_integer(int num);
extern void uart0_config_VIC(void);
extern void uart0_interupt_enable(void);
extern void uart0_rx_string(unsigned char*ptr,unsigned int len);
extern void integer_to_hex(unsigned int);
extern int uart0_atoi(unsigned char*a1);
extern void delay_ms(unsigned int);
extern void delay_sec(unsigned int);
extern void delay_us(unsigned int);
extern void lcd_data(unsigned char);
extern void lcd_cmd(unsigned char);
extern void lcd_init(void);
extern void lcd_string(char*);
extern void lcd_cgram1(unsigned char *ptr);
extern void lcd_cgram2(unsigned char *ptr);
extern void lcd_cgram3(unsigned char *ptr);
extern void lcd_cgram4(unsigned char *ptr);
extern void lcd_cgram5(unsigned char *ptr);
extern void timer0_interupt_init(unsigned int);
extern void config_VIC(void);
extern void i2c_byte_write_frame(unsigned char ad,unsigned char mr,unsigned char data);
extern unsigned char i2c_byte_read_frame(unsigned char ad,unsigned char mr);
extern void i2c_init(void);
extern void spi0_init(void);
extern unsigned char spi0_data(unsigned char data);
extern unsigned short int mcp3204_read_data(unsigned char ch_num);
extern void can1_tx(CAN1 v);
extern void can1_init(void);
extern void can1_rx(CAN1 *ptr);
extern void config_vic_CAN(void);
extern void can1_interupt_init(void);
#include <LPC21xx.H>
#include "header.h"
unsigned int flag;
CAN1 v1={0X3F0,0X13,0,0,1};//Left-Indecator ON
CAN1 v2={0X3F0,0X14,0,0,1};//Left-Indecator OFF
CAN1 v3={0X3F1,0X15,0,0,1};//Right-Indecator ON
CAN1 v4={0X3F1,0X16,0,0,1};//Right-Indecator OFF
CAN1 v5={0X3F6,0X30,0,0,1};//Head-Light ON
CAN1 v6={0X3F6,0X31,0,0,1};//Head-Light OFF
int main()
{
unsigned int le=0,re=0,h=0;
can1_init();
uart0_init(9600);
can1_interupt_init();
config_vic_CAN();
while(1)
{
if(SW1==0)
{
while(SW1==0);
if(le)
{
le=0;
re=1;
uart0_tx_string("Left-OFF\r\n");
can1_tx(v2);//Left-Indecator off
}
else
{
le=1;
re=!re;
uart0_tx_string("Left-ON\r\n");
can1_tx(v1);//Left-Indecator on
}
}
if(SW2==0)
{
while(SW2==0);
if(re)
{
re=0;
le=1;
can1_tx(v4);//Right-Indecator off
}
else
{
re=1;
le=0;
can1_tx(v3);//Right-Indecator on
}
}
if(SW3==0)
{
while(SW3==0);
if(h)
{
h=0;
can1_tx(v6);//Head-light off
}
else
{
h=1;
can1_tx(v5);//Head-light on
}
}
}
}







{kind=link}
Comments