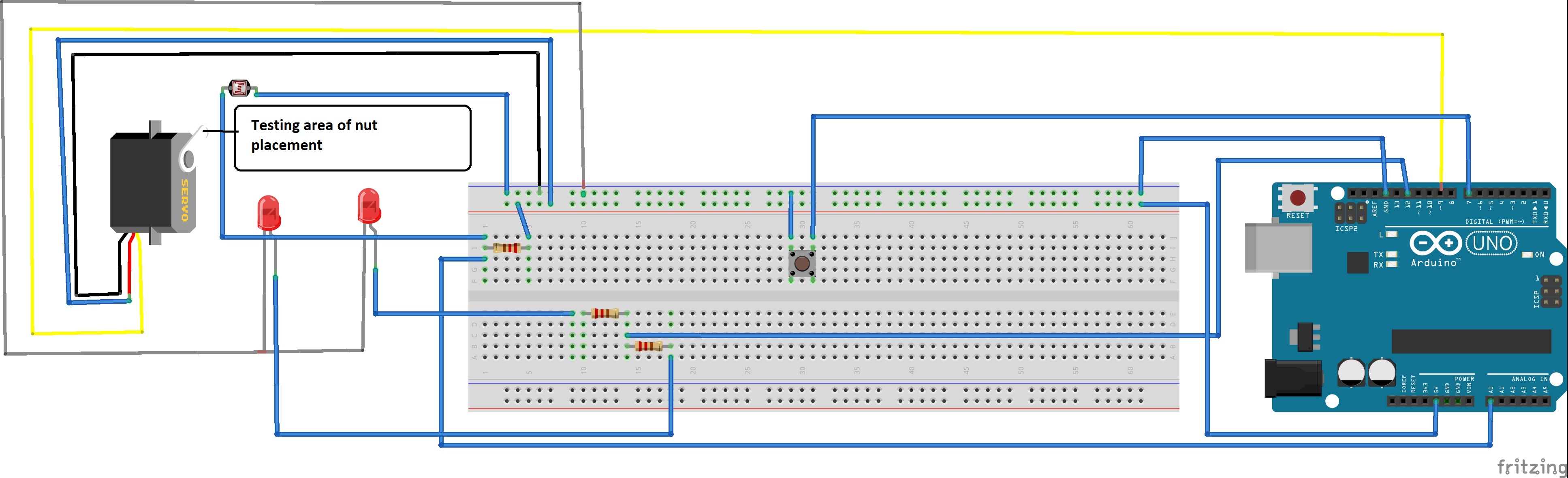
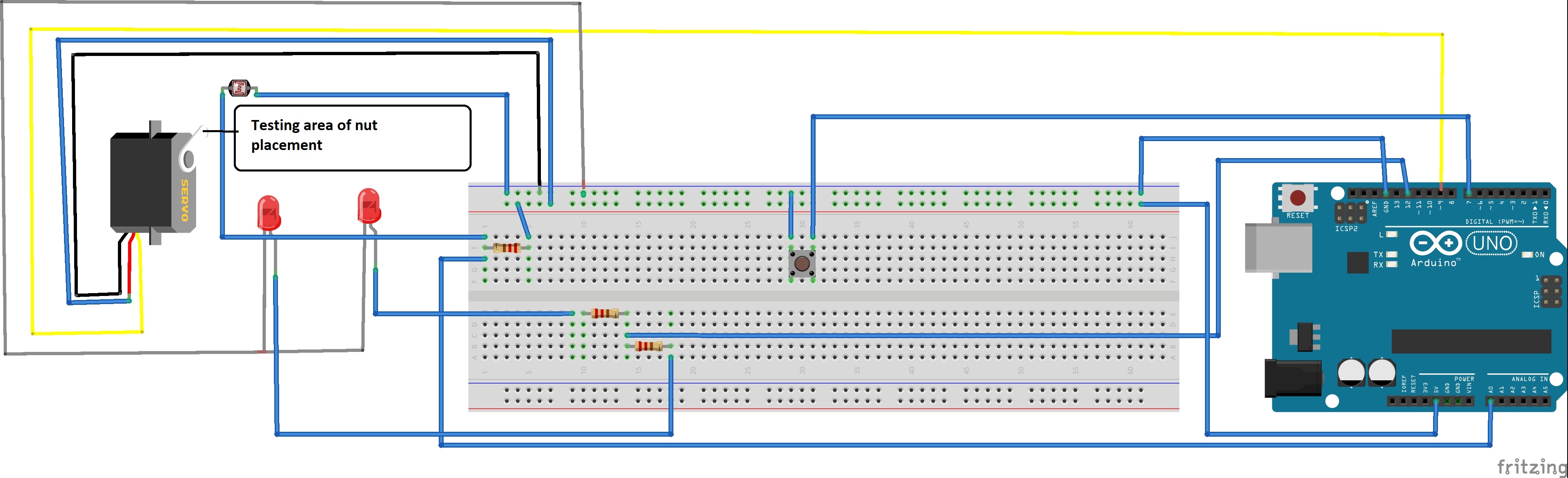
It is a simple industry based project and segregates the nut into a good-quality container and a bad-quality container. It does it by the reflection of light spectrum on the nut and observing the reflected light. As we all the the concept of black reflects hard and white reflects much, and the right suite for this is badam as it has brown outer covering and white hard inside.
- Here I have used a pvc perpendicular and which perfectly fits the size of badam. As above the recognition area is quite dark and light sensitive and there is blue lights which reflects good which there I have installed in the side pvc. And there is a ldr in the top of the pvcfor observation which is fixed with clay. And for the discard and segregating process a servo is used with a rod tied to the pvc which subsequently moves the badam into desired quality-cup of badam.
You can able to check the working of my bot by the video link down:-
https://drive.google.com/file/d/1hM_QdiO0TDkJXdKsLmvfvzIWmxOqWSij/view?usp=drivesdk



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







{kind=link}

Comments