#include<Servo.h>
#include<PID_v1.h>
#include<SoftwareSerial.h>
int set=6,neg=-24,pos=24,base=130;//Setpoint,Negative,Positive,Base values.neg shows tilt on other side of ultrasonic sensor
long cm1=set; //For filtering purpose
const double a=0.5; //Exponential filter parameter
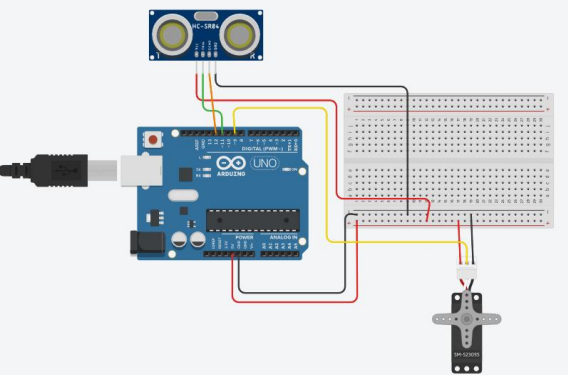
const int servoPin = 9; //Servo pin
float Kp = 0.8; //Initial Proportional Gain
float Ki = 0.02; //Initial Integral Gain
float Kd = 0.75; //Intitial Derivative Gain
double Setpoint, Input, Output, ServoOutput;
PID myPID(&Input, &Output, &Setpoint, Kp, Ki, Kd, REVERSE); //Initialize PID object, which is in the class PID.
Servo myServo; //Initialize Servo.
void setup() {
Serial.begin(9600); //Begin Serial
myServo.attach(servoPin); //Attach Servo
Input = readPosition(); //Calls function readPosition() and sets the balls
// position as the input to the PID algorithm
myPID.SetMode(AUTOMATIC); //Set PID object myPID to AUTOMATIC
myPID.SetOutputLimits(neg,pos); //Set Output limits to neg and pos degrees.
}
void loop()
{
Setpoint = set; //Give value for setpoint
Input = readPosition();
myPID.Compute(); //computes Output in range of neg to pos degrees
ServoOutput=base+Output; // value in base is my horizontal
myServo.write(ServoOutput); //Writes value of Output to servo
}
float readPosition() {
delay(40);
const int TrigPin = 11;//Trig
const int EchoPin = 12;//Echo
long duration, cm,cmn;
unsigned long now = millis();
pinMode(TrigPin, OUTPUT);
digitalWrite(TrigPin, LOW);
delayMicroseconds(2);
digitalWrite(TrigPin, HIGH);
delayMicroseconds(5);
digitalWrite(TrigPin, LOW);
pinMode(EchoPin, INPUT);
duration = pulseIn(EchoPin, HIGH);
cm = duration/(15*2);
if(cm > 30) // 30 cm is the maximum position for the ball
{cm=30;} //Signal Conditioning for ultrasonic sensor
cmn = a * cm + (1 - a) * cm1; //Exponential filter- signal conditioning
Serial.print(cm); Serial.print("\t");
Serial.println(cmn); //cmn is filtered value
delay(10);
cm1 = cmn; //saved to cm1 which is used as history in exponential filter
return (cmn); //Returns filtered distance value in cm
}




{kind=link}
Comments