/*
* Project: plinkoPiezo
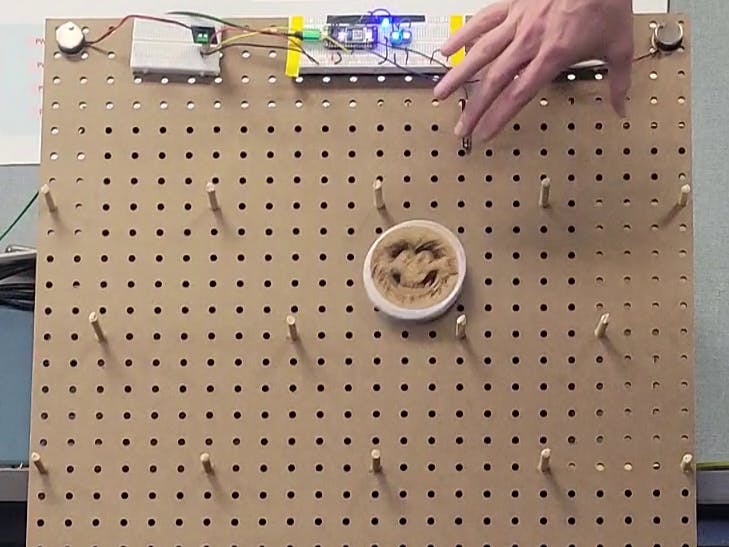
* Description: Uses a pair of piezo elements attached to a Plinko board to triangulate
* and publish position of falling puck. Coordinates of pegs are charted to
* lat/lon coordinates of Albuquerque Plaza.
* Author: Nick Tolk
* Date: 10-APR-2023
*/
// when not "LIVE", events are echoed over Serial rather than being published via MQTT
#define LIVE
#ifdef LIVE
const bool liveRun = true;
#else
SYSTEM_MODE(SEMI_AUTOMATIC)
const bool liveRun = false;
#endif
SYSTEM_THREAD(ENABLED)
#include <math.h>
#include <iostream>
#include <vector>
#include <string>
#include "neopixel.h"
// these are used for image publication to Adafruit dashboard
#include <Adafruit_MQTT.h>
#include "Adafruit_MQTT/Adafruit_MQTT_SPARK.h"
#include "Adafruit_MQTT/Adafruit_MQTT.h"
#include <JsonParserGeneratorRK.h>
#include "credentials.h"
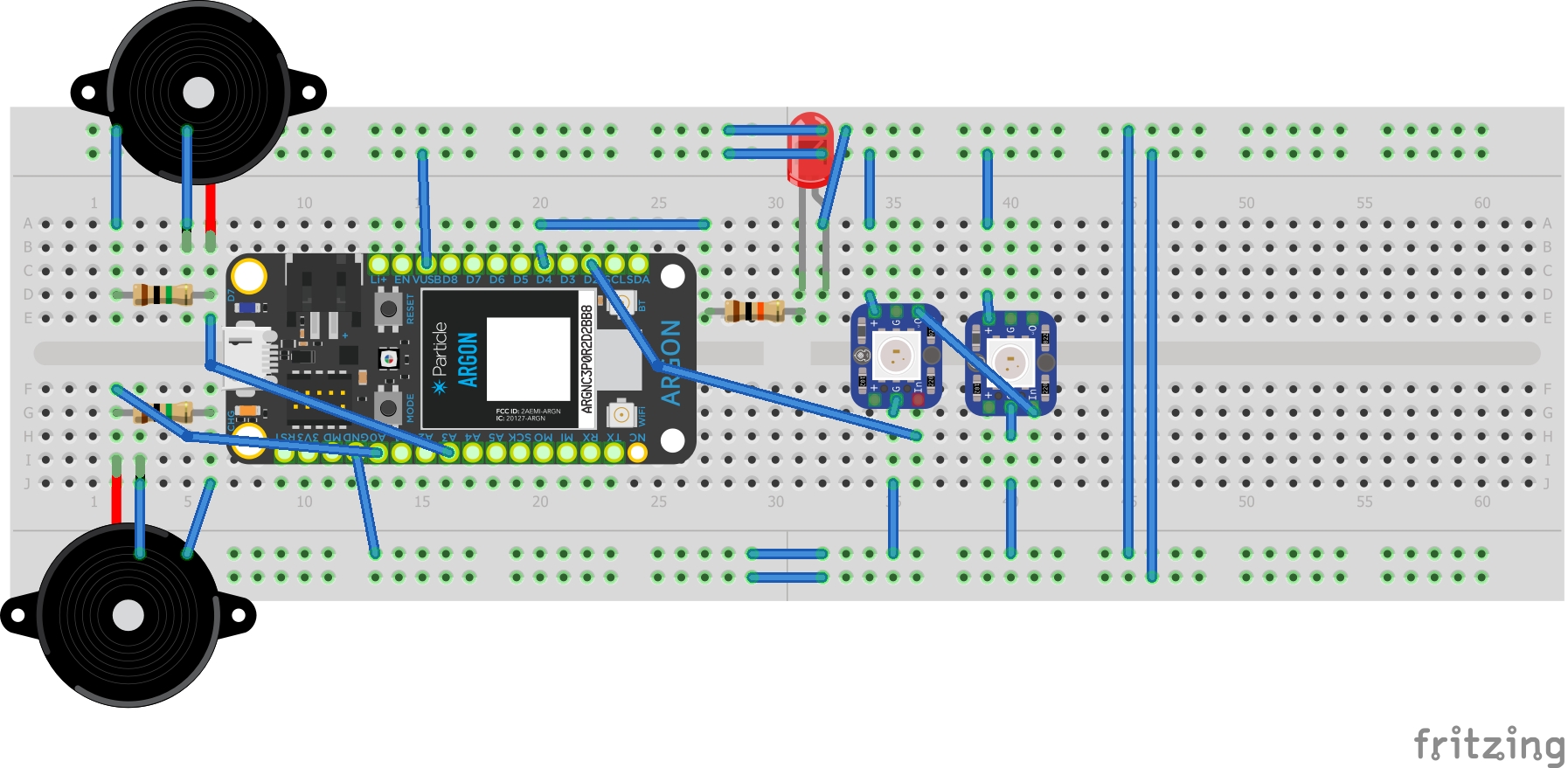
const int ONBOARD_LED = D7;
const int PIXEL_PIN = D2;
const int PIXEL_COUNT = 2;
#define PIXEL_TYPE WS2812B
Adafruit_NeoPixel pixel(PIXEL_COUNT, PIXEL_PIN, PIXEL_TYPE);
const int PIEZO_PIN_L = A3; // analog input pins
const int PIEZO_PIN_R = A4;
const int EVENT_LED = D4; // lit when publishing data
const int PEG_ROWS = 8; // starting from top (0), even rows have 5 pegs and odd rows have 4
// coordinates on Albuquerque Plaza for plotting positions
const double LAT_TOP = 35.08799050651442;
const double LAT_BOTTOM = 35.08560415806543;
const double LON_RIGHT = -106.65038177579693;
const double LON_LEFT = -106.65203434020583;
// these are all constants tweaked to calibrate to the board and elements being used
// they're for handling input ranges on sensors, and thresholds for deciding whether data is impactful
const int PIEZO_MIN_O = -100;
const int PIEZO_MAX_O = 100;
const float PIEZO_MIN_I = -1.5;
const float PIEZO_MAX_I = 4.0;
const float PIEZO_THRESH_L = 60.0;
const float PIEZO_THRESH_R = 60.0;
const float PIEZO_THRESH_ROW = 70.0;
// us to consider an impact missed or erroneous
const int PIEZO_TIMEOUT = 60*1000;
const int NEW_GAME_T = 500; // ms to condider a game restarted
const int EVENT_T = 200; // ms to keep event LED lit when publishing
const int SERIAL_TIMEOUT = 10*1000; // ms to wait for serial connection - may be absent
const int PUB_DELAY = 200; // ms to wait between MQTT publishes
unsigned long lastPub; // for timing
const uint16_t SAMPLES = 4; // average over several samples as low-pass
uint8_t lIn[SAMPLES]; // left piezo data
uint8_t rIn[SAMPLES]; // right piezo data
system_tick_t tIn[SAMPLES]; // time data
unsigned long lastTick = 0; // stores us (micros()) ticks for timing
int elapsed; // us since lastTick
int dataIndex = 0;
// run every timt through loop() to keep alive
void MQTT_connect();
bool MQTT_ping();
// creates JSON payload to be published by mPub() thread
void createEventPayLoad(float lat, float lon);
TCPClient TheClient;
Adafruit_MQTT_SPARK mqtt(&TheClient,AIO_SERVER,AIO_SERVERPORT,AIO_USERNAME,AIO_KEY);
Adafruit_MQTT_Publish pubFeed = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/latlon");
int piezoL, piezoR; // most recent readings from piezo inputs
long tLeft, tRight; // tLeft and tRight are >= 0 to indicate event time. -1 means nothing currently registered.
int tDiff; // difference between left and right impact times; used for triangulation
bool eventOn = false; // used to blink onboard LED erradically during Serial startup and indicate events
system_tick_t tNew; // tracks last impact to decide if a new game has been started
int lr, lrLast, mag; // time of impact offsets and magnitude of piezo read
double latOut, lonOut; // values published correlating peg positions to world lat/lon
// microStart and microNow are used to reset timing and record TOI
unsigned long microStart;
long microNow;
std::vector<String> mqttVector;
int piezoI; // index
float sum; // used for average calculation
float lAvg, rAvg;
float mLeft, mRight; // records magnitude at time-of-impact
uint8_t r, g, b; // for Neopixel feedback
bool playing; // true when game is in play
int row, col; // calculated row/column position of last impact
// these clear data arrays
void resetLeft();
void resetRight();
// set Neopixels according to left/right shift from last location
void setLights(int lr, int mag);
void setup() {
Serial.begin(9600);
// mPub will publish Strings in mqttVector to "/feeds/plinko"
new Thread("mPub", mPub);
pinMode(PIEZO_PIN_L, INPUT);
pinMode(PIEZO_PIN_R, INPUT);
pinMode(EVENT_LED, OUTPUT);
pixel.begin();
pixel.setBrightness (15);
pixel.setPixelColor(0, 0x00ffff);
pixel.setPixelColor(1, 0xff00ff);
pixel.show();
// wait for serial, while blinking onboard LED irregularly to distinguish from system ticks
pinMode(ONBOARD_LED, OUTPUT);
if (!liveRun){
while(!Serial.available() && millis() - lastTick < SERIAL_TIMEOUT){
digitalWrite(ONBOARD_LED, eventOn);
digitalWrite(EVENT_LED, eventOn);
if (random(2)){ // flip on/off chaotically
eventOn = !eventOn;
}
delay(EVENT_T);
Serial.begin(9600);
}
}
// eventOn is used to track and communicate MQTT traffic
eventOn = false;
digitalWrite(ONBOARD_LED, eventOn);
digitalWrite(EVENT_LED, eventOn);
if (Serial.available()){
delay(200);
Serial.println("Serial is up!");
}
// make sure wifi is up if we intend to publish
if (liveRun){
WiFi.on();
WiFi.connect();
while(WiFi.connecting()) {
Serial.printf(".");
delay(100);
}
}
Serial.printf("\n\n");
lastTick = millis();
microStart = micros();
tLeft = -1;
tRight = -1;
playing = false;
row = -1;
}
void loop() {
if (liveRun){
MQTT_connect();
MQTT_ping();
}
// see if we've timed out to new game
if (playing && millis() - tNew > NEW_GAME_T){
playing = false;
row = -1;
resetLeft();
resetRight();
}
// reset event LED if necessary
if (eventOn && millis() - tNew > EVENT_T){
eventOn = false;
digitalWrite(EVENT_LED, eventOn);
}
// check piezos
lIn[dataIndex] = analogRead(PIEZO_PIN_L);
rIn[dataIndex] = analogRead(PIEZO_PIN_R);
tIn[dataIndex] = millis();
// < 0 indicated no currently registered event
if (tLeft < 0){
lAvg = piezoAvg(lIn);
}
if (tRight < 0){
rAvg = piezoAvg(rIn);
}
if (!liveRun){
Serial.printf("\r%6.2f, %6.2f, %f", lAvg, rAvg, (micros()-microStart)/1000000.0);
}
// if we're not playing, the clock hasn't started
if (!playing && tLeft < 0 && tRight < 0){
microStart = micros();
microNow = 0;
} else {
microNow = micros() - microStart;
}
// register times for events if one of our piezos is above the cutoff
if ((tLeft < 0) && (lAvg > PIEZO_THRESH_L)){
mLeft = lAvg - PIEZO_THRESH_L;
tLeft = microNow;
}
if ((tRight < 0) && (rAvg > PIEZO_THRESH_R)){
mRight = rAvg - PIEZO_THRESH_R;
tRight = microNow;
}
// check for registered events on both piezos
if (tRight >= 0 && tLeft >= 0){
tNew = millis(); // keep reset game clock current
if (!playing){
playing = true; // if we weren't playing, we are now
microStart = micros(); // and we'll reset the clock for the last time this game
lastTick = microStart;
}
if (sqrt(mLeft * mLeft + mRight + mRight) > PIEZO_THRESH_ROW){
row++;
}
if (!eventOn){
eventOn = true;
digitalWrite(EVENT_LED, HIGH);
}
elapsed = micros() - lastTick; // time since last registered event
lastTick = micros();
tDiff = tLeft - tRight; // difference to determine position
lr = (int)round(map(tDiff/1000.0, PIEZO_MIN_I, PIEZO_MAX_I, (float)PIEZO_MIN_O, (float)PIEZO_MAX_O));
mag = (int)round(sqrt(mLeft * mLeft + mRight * mRight));
if (row == 0){
col = map(lr, PIEZO_MIN_O, PIEZO_MAX_O, 0, 4);
} else {
if (row % 2){ // 4 pegs on odd rows
if (lr < lrLast && col > 0){
col--;
}
} else { // 5 pegs on even rows
if (lr > lrLast && col < 4){
col++;
}
}
}
col = (col > 4) ? 4 : (col < 0) ? 0 : col;
lrLast = lr;
latOut = map((float)row, 0.0, (float)PEG_ROWS - 1, (float)LAT_TOP, (float)LAT_BOTTOM);
if (row % 2){ // 4 pegs on odd rows
lonOut = map((float)col + 0.5, 0.5, 3.5, LON_LEFT, LON_RIGHT);
} else { // 5 pegs on even rows
lonOut = map((float)col, 0.0, 4.0, LON_LEFT, LON_RIGHT);
}
createEventPayLoad(latOut, lonOut);
if (!liveRun){
Serial.printf("%s\n", mqttVector.front().c_str());
}
setLights(lr, mag);
// reset impact times and levels
resetLeft();
resetRight();
delay(PIEZO_TIMEOUT / 1000.0); // pause so we don't double-count
}
// these check for we have a one-sided event that failed to pair
if (tLeft >= 0 && (microNow - tLeft) > PIEZO_TIMEOUT){
resetLeft();
}
if (tRight >= 0 && (microNow - tRight) > PIEZO_TIMEOUT){
resetRight();
}
dataIndex = (dataIndex + 1) % SAMPLES;
}
// sets Neopixel colors to reflect detected event locations in real-time
void setLights(int lr, int mag){
lr = (lr < PIEZO_MIN_O) ? PIEZO_MIN_O : (lr > PIEZO_MAX_O) ? PIEZO_MAX_O : lr; // bounds check
r = 3 * mag;
r = (r > 0xff) ? 0xff : r;
b = map(lr, PIEZO_MIN_O, PIEZO_MAX_O, 0, 0xff);
g = map(lr, PIEZO_MIN_O, PIEZO_MAX_O, 0xff, 0);
pixel.setPixelColor(0, (((r << 8) | g) << 8) | b);
b = 0xff - b;
g = 0xff - g;
pixel.setPixelColor(1, (((r << 8) | g) << 8) | b);
pixel.show();
}
// returns average of values in *data over SAMPLES elements
float piezoAvg(uint8_t *data){
sum = 0;
for (piezoI = 0; piezoI < SAMPLES; piezoI++){
sum += data[piezoI];
}
return(sum / (float)SAMPLES);
}
// sets tLeft and mLeft to 0 and empties lIn[]
void resetLeft(){
if (!liveRun){
Serial.printf("RL\n");
}
for (piezoI = 0; piezoI < SAMPLES; piezoI++){
lIn[piezoI] = 0;
}
tLeft = -1;
mLeft = 0;
}
// sets tRight and mRight to 0 and empties rIn[]
void resetRight(){
if (!liveRun){
// Serial.printf("RR\n");
}
for (piezoI = 0; piezoI < SAMPLES; piezoI++){
rIn[piezoI] = 0;
}
tRight = -1;
mRight = 0;
}
String strOut;
int tOut;
// runs detached watching for mqttVector to have at least one member, and publishes while honoring the publication throttle delay
void mPub(){
system_tick_t lastThreadTime = 0;
while (true){
if(mqttVector.size() > 0 && millis()- lastPub > PUB_DELAY){
lastPub = millis();
strOut = mqttVector.front();
mqttVector.erase(mqttVector.begin());
if (liveRun){
if(mqtt.Update()) {
pubFeed.publish(strOut);
}
}
}
os_thread_delay_until(&lastThreadTime, 10);
}
}
// Function to connect and reconnect as necessary to the MQTT server.
// Should be called in the loop function and it will take care if connecting.
void MQTT_connect() {
int8_t ret;
// Return if already connected.
if (mqtt.connected()) {
return;
}
Serial.print("Connecting to MQTT... ");
while ((ret = mqtt.connect()) != 0) { // connect will return 0 for connected
Serial.printf("Error Code %s\n",mqtt.connectErrorString(ret));
Serial.printf("Retrying MQTT connection in 5 seconds...\n");
mqtt.disconnect();
delay(5000); // wait 5 seconds and try again
}
Serial.printf("MQTT Connected!\n");
}
bool MQTT_ping() {
static unsigned int last;
bool pingStatus = 0;
if ((millis()-last)>120000) {
Serial.printf("Pinging MQTT \n");
pingStatus = mqtt.ping();
if(!pingStatus) {
Serial.printf("Disconnecting \n");
mqtt.disconnect();
}
last = millis();
}
return pingStatus;
}
// crafts JSON packet from arguments, then pushes that onto mqttVector to be handled elsewhere
// previously also created separate packet pushed to tVector for timing
void createEventPayLoad(float lat, float lon) {
JsonWriterStatic<256> jw;
{
JsonWriterAutoObject obj(&jw);
jw.insertKeyValue ("lat", lat);
jw.insertKeyValue ("lon", lon);
}
mqttVector.push_back(jw.getBuffer());
}



_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)











{kind=link}
Comments