About SelsaSelsa is a girl that is just known how to reject or avoid the boys that like her. (i.e how to avoid disturbance in front of her).
At first, she was only able to move horizontal direction without turning because of hard coding. However, after she got her eyes (i.e ultrasonic sensor), she can avoid obstacles and walls and turn according to the program.
Note (Selsa named is derived from Tesla and some random thoughts of my friend and mine. It is a girl name.)
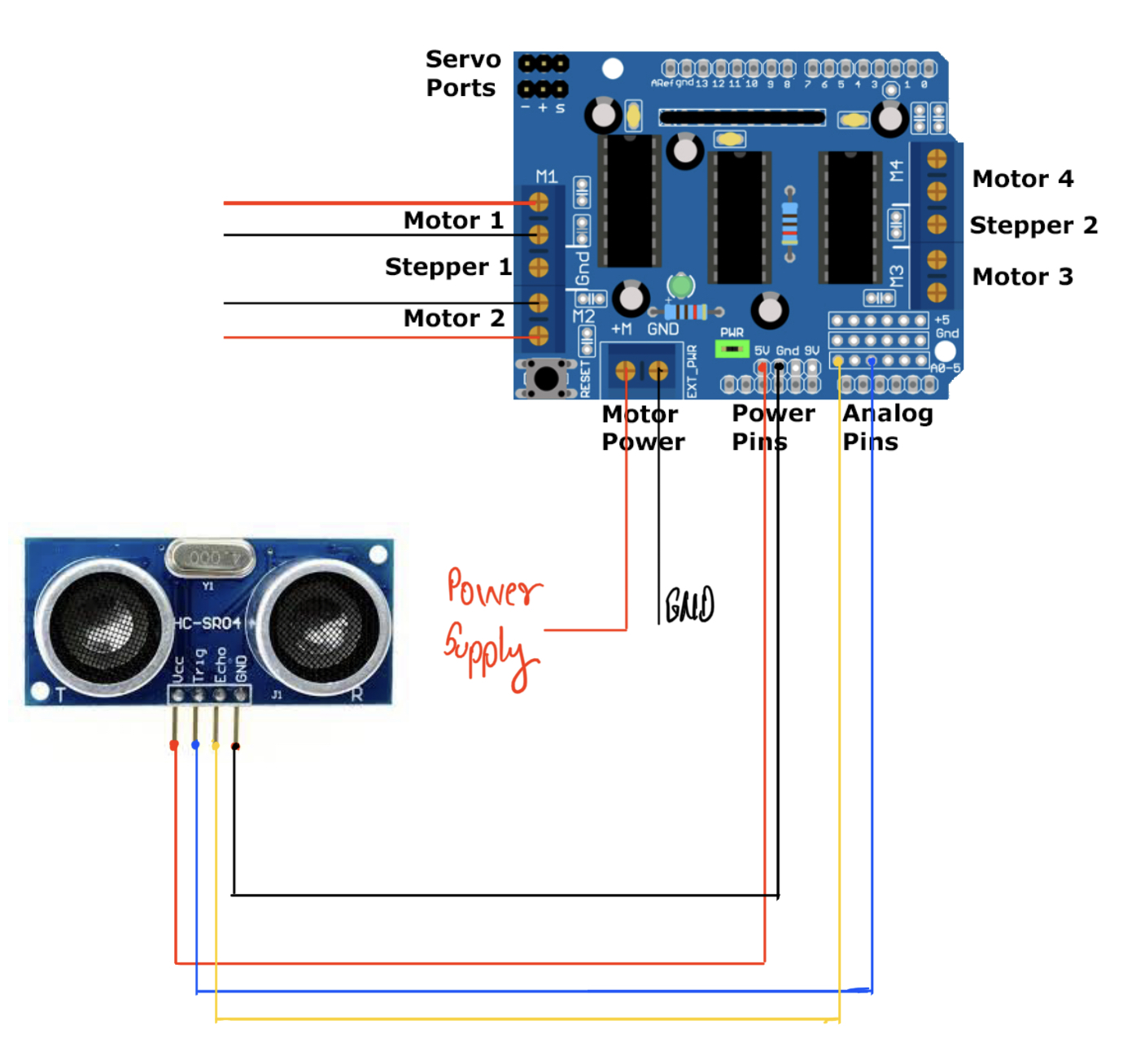
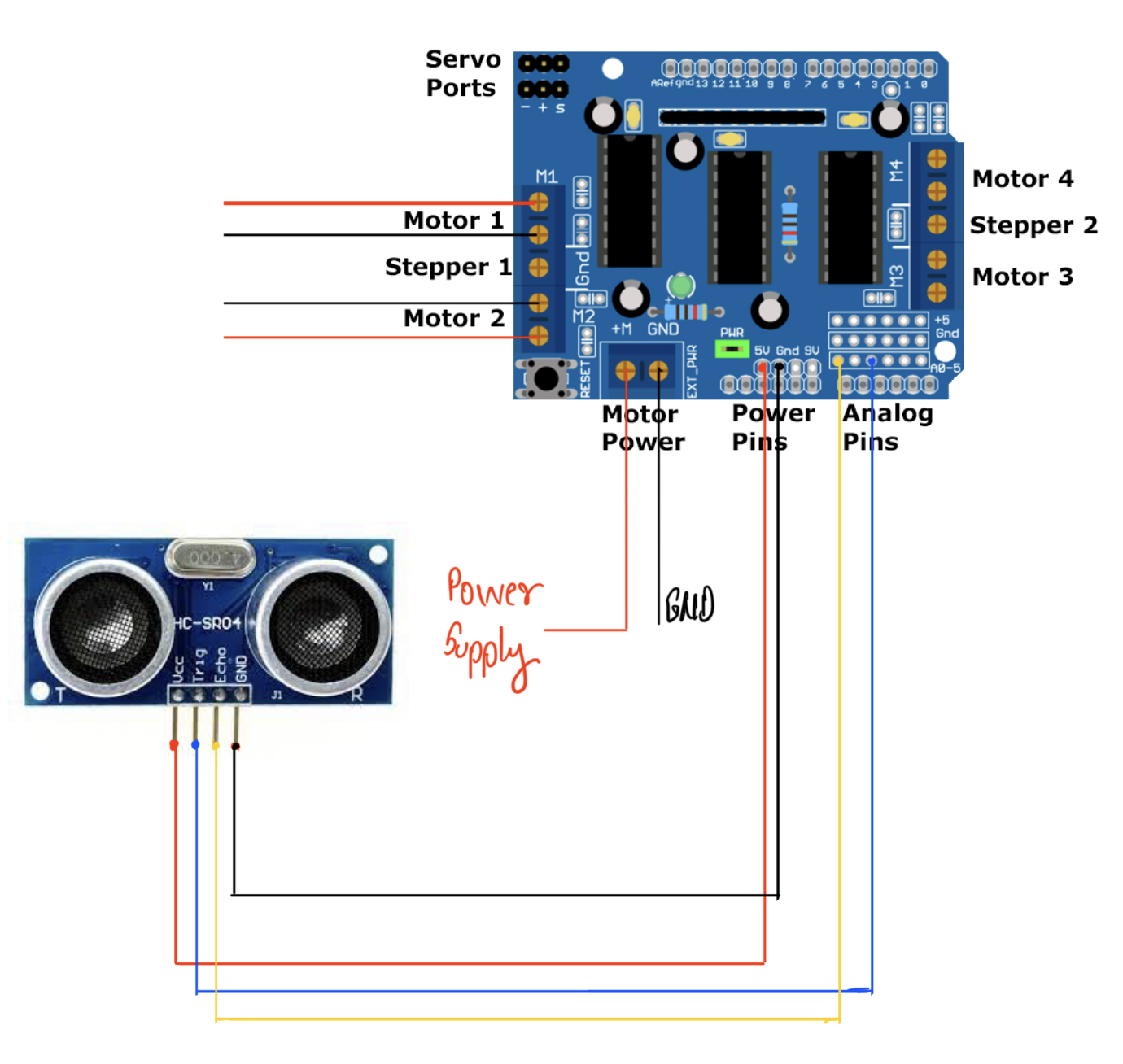
How does it work?It works with the use of L293D motor driver shield together Arduino and ultrasonic sensor.
During this current version, it can avoid the obstacle in front of it and turn back and turn around 270 degree.
Why I decided to make this project?It is because I am interested in robotics and want to create a self-driven car (my dream) as final version of Selsa. Another reason is that I want to learn and test more about Arduino and its components. Moreover, this project is also for a part of the application of my dream university.
VideoHere is the video of how it works.
(This is the current version so called version 2.0)
Note : For circuit diagram, I am still trying to make one. It is still pending.
Caution : Be careful of your power supply. 



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)













{kind=link}
Comments