



Hardware components | ||||||
_xcg7vos8ax_LjVH1Q6mKB.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Copy the libeary below to make the arduino IDE support W5100S.https://github.com/WIZnet-ArduinoEthernet/Ethernet
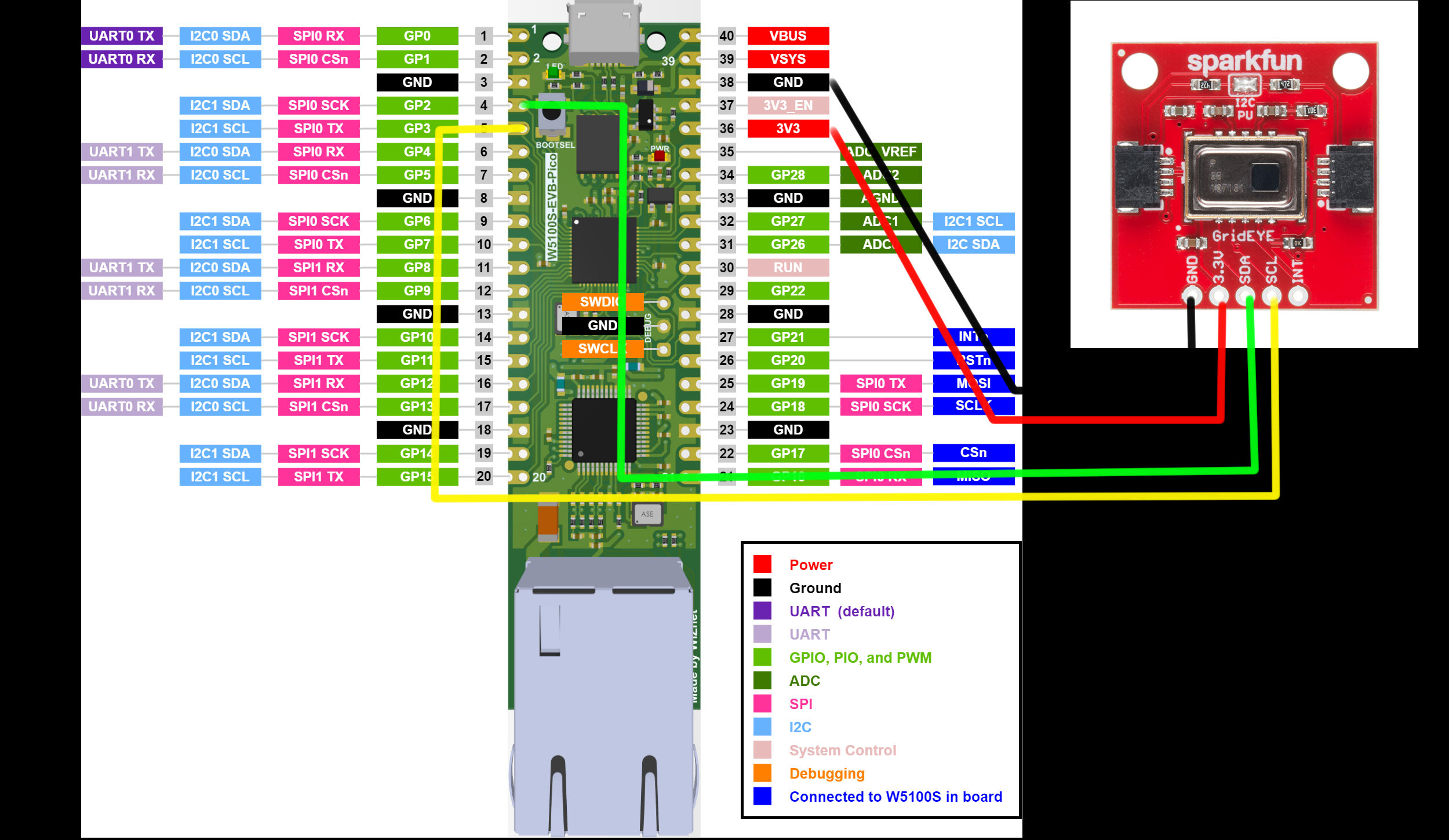
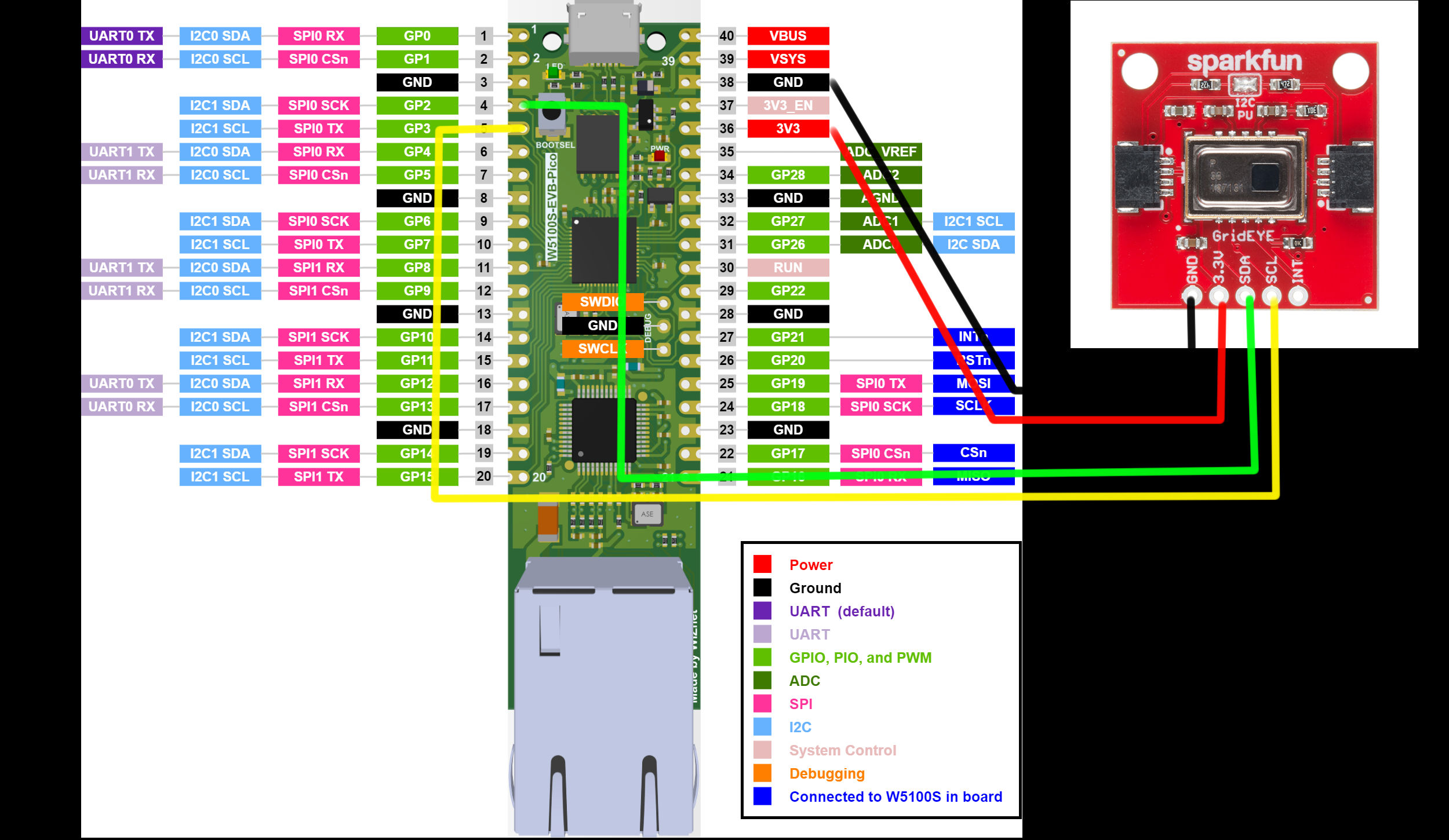
HardwareConnect W5100S-EVB-Pico and sparkfun Grid-EYE module
Please refer to the attached file.
Python result like below.
Since python is not good at making movies, I try to use Processing still testing.
But there is a problem with UDP listening.
Finally, I used PyQt6 to complete the continuous image output.
/*
modify from
example
Ethernet - UDPSendReceiveString
and
Adafruit AMG88xx - pixels_test
*/
/*
UDPSendReceiveString
This sketch receives UDP message strings, prints them to the serial port
and sends an "acknowledge" string back to the sender
A Processing sketch is included at the end of file that can be used to send
and receive messages for testing with a computer.
created 21 Aug 2010
by Michael Margolis
This code is in the public domain.
*/
/***************************************************************************
This is a library for the AMG88xx GridEYE 8x8 IR camera
This sketch tries to read the pixels from the sensor
Designed specifically to work with the Adafruit AMG88 breakout
----> http://www.adafruit.com/products/3538
These sensors use I2C to communicate. The device's I2C address is 0x69
Adafruit invests time and resources providing this open source code,
please support Adafruit andopen-source hardware by purchasing products
from Adafruit!
Written by Dean Miller for Adafruit Industries.
BSD license, all text above must be included in any redistribution
***************************************************************************/
/*
AMG88xx
*/
#include <Wire.h>
#include <Adafruit_AMG88xx.h>
Adafruit_AMG88xx amg;
float pixels[AMG88xx_PIXEL_ARRAY_SIZE];
/*
Ethernet
*/
#include <Ethernet.h>
#include <EthernetUdp.h>
// Enter a MAC address and IP address for your controller below.
// The IP address will be dependent on your local network:
byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED};
IPAddress ip(192, 168, 137, 200);//the IP address is dependent on your network
IPAddress dnsServer(192, 168, 137, 1);// the dns server ip
IPAddress gateway(192, 168, 137, 1);// the router's gateway address:
IPAddress subnet(255, 255, 255, 0);// the subnet:
unsigned int localPort = 8888; // local port to listen on
// buffers for receiving and sending data
char packetBuffer[UDP_TX_PACKET_MAX_SIZE]; // buffer to hold incoming packet,
char ReplyBuffer[1000]; // a string to send back
// An EthernetUDP instance to let us send and receive packets over UDP
EthernetUDP Udp;
/*
this project use
*/
bool measure_state = 0;
String Sendbuf;
void setup() {
// Open serial communications and wait for port to open:
Serial.begin(115200);
// while (!Serial) {
// ; // wait for serial port to connect. Needed for native USB port only
// }
Serial.println("Start Serial");
Wire1.setSDA(2);
Wire1.setSCL(3);
Wire1.begin();
Serial.println(F("AMG88xx pixels"));
bool status;
// default settings
status = amg.begin(AMG88xx_ADDRESS, &Wire1);
if (!status) {
Serial.println("Could not find a valid AMG88xx sensor, check wiring!");
}
// You can use Ethernet.init(pin) to configure the CS pin
Ethernet.init(17); // W5100S-EVB-Pico
// start the Ethernet
Ethernet.begin(mac, ip, dnsServer, gateway, subnet);
// Check for Ethernet hardware present
if (Ethernet.hardwareStatus() == EthernetNoHardware) {
Serial.println("Ethernet shield was not found. Sorry, can't run without hardware. :(");
Serial.println(Ethernet.hardwareStatus());
while (true) {
delay(1); // do nothing, no point running without Ethernet hardware
}
}
if (Ethernet.linkStatus() == LinkOFF) {
Serial.println("Ethernet cable is not connected.");
}
//print out the IP address
Serial.print("IP = ");
Serial.println(Ethernet.localIP());
Serial.print("Port = ");
Serial.println(localPort);
// start UDP
Udp.begin(localPort);
IPAddress remote = Udp.remoteIP();
Serial.println("connect with UDP and send \"start\" ");
}
void loop() {
// if there's data available, read a packet
int packetSize = Udp.parsePacket();
if (packetSize) {
// Serial.print("Received packet of size ");
// Serial.println(packetSize);
// Serial.print("From ");
// read the packet into packetBuffer
Udp.read(packetBuffer, UDP_TX_PACKET_MAX_SIZE);
// Serial.println("Contents:");
Serial.println(packetBuffer);
if (strcmp(packetBuffer, "start") == 0) //start commend
{
Serial.println("start!");
measure_state = 1;
}
else if (strcmp(packetBuffer, "stop") == 0) //stop commend
{
Serial.println("stop!");
measure_state = 0;
}
memset(packetBuffer, 0, sizeof(packetBuffer));
}
if (measure_state)
{
amg.readPixels(pixels);
Sendbuf = "";
for (int i = 1; i <= AMG88xx_PIXEL_ARRAY_SIZE; i++) {
String j = "";
Sendbuf += String(pixels[i - 1]);
if (i < AMG88xx_PIXEL_ARRAY_SIZE)
{
Sendbuf += ", ";
}
}
// Sendbuf += ", 55555"; //magic number
// Serial.println(Sendbuf.length());
Sendbuf.toCharArray(ReplyBuffer, 1000);
Serial.println(ReplyBuffer);
// send a reply to the IP address and port that sent us the packet we received
Udp.beginPacket(Udp.remoteIP(), Udp.remotePort());
// Serial.print("IP = ");
// Serial.println(Udp.remoteIP());
//
// Serial.print("Port = ");
// Serial.println(Udp.remotePort());
Udp.write(ReplyBuffer);
Udp.endPacket();
}
delay(100);
}
import numpy as np
from PyQt6 import QtWidgets
from PyQt6.QtGui import *
from PyQt6.QtCore import *
import matplotlib.pyplot as plt
from matplotlib.backends.backend_qt5agg import FigureCanvasQTAgg as FigureCanvas
import sys
import socket
HOST = '192.168.137.200'
PORT = 8888
server_addr = (HOST, PORT)
class GridEYE(QtWidgets.QWidget):
def __init__(self):
super().__init__()
self.setWindowTitle('Grid EYE')
self.resize(640, 480)
self.t = 0
self.ui()
def ui(self):
self.canvas = FigureCanvas(self.heatmap())
self.graphicview = QtWidgets.QGraphicsView(self)
self.graphicview.setGeometry(0, 0, 640, 480)
self.graphicscene = QtWidgets.QGraphicsScene()
self.graphicscene.setSceneRect(0, 0, 620, 460)
self.graphicscene.addWidget(self.canvas)
self.graphicview.setScene(self.graphicscene)
def heatmap(self):
fig = plt.figure(figsize=(6,4), dpi=100)
client_socket = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
client_socket.settimeout(0.15)
message = b'start'
client_socket.sendto(message, server_addr)
try:
data, server = client_socket.recvfrom(1024)
data = data.decode('utf-8')
string_data = data.split(',')
array = np.array(string_data,dtype=np.float32)
# array = np.delete(array, -1)
mx = array.reshape((8,8))
# plt.imshow(mx, vmin=array.min(), vmax=array.max(),cmap='hot', interpolation='bicubic')
plt.imshow(mx,cmap='hot', interpolation='bessel')
# plt.show()
except socket.timeout:
print('REQUEST TIMED OUT')
plt.close()
return fig
def count(self):
self.canvas = FigureCanvas(self.heatmap())
self.graphicscene.clear()
self.graphicscene.addWidget(self.canvas)
if __name__ == '__main__':
app = QtWidgets.QApplication(sys.argv)
Form = GridEYE()
Form.show()
timer = QTimer()
timer.timeout.connect(Form.count)
timer.start(5)
app.exec()
client_socket = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
message = b'stop'
client_socket.sendto(message, server_addr)
client_socket.close()
sys.exit()
import numpy as np
import matplotlib.pyplot as plt
import socket
HOST = '192.168.137.200'
PORT = 8888
server_addr = (HOST, PORT)
for pings in range(10):
client_socket = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
client_socket.settimeout(0.15)
message = b'start'
addr = (HOST, 8888)
client_socket.sendto(message, addr)
try:
data, server = client_socket.recvfrom(1024)
data = data.decode('utf-8')
string_data = data.split(',')
array = np.array(string_data,dtype=np.float32)
# array = np.delete(array, -1) #pop magic number
mx = array.reshape((8,8))
# plt.imshow(mx, vmin=array.min(), vmax=array.max(),cmap='hot', interpolation='bicubic')
plt.imshow(mx,cmap='hot', interpolation='bicubic')
plt.savefig(f'myimage{pings}.png')
# plt.show()
except socket.timeout:
print('REQUEST TIMED OUT')



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments