


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
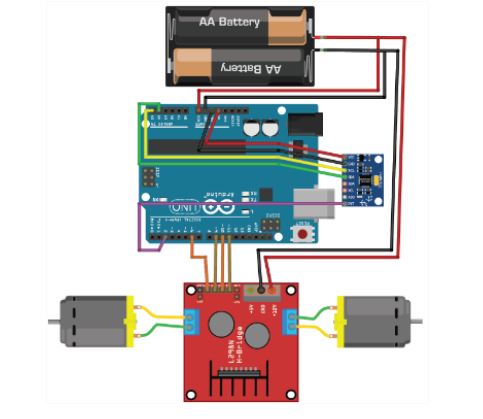
self-balancing robot is in trending nowadays. many students making this for fun and their projects also. and this concept also having the future also. coz we are growing up to techno era where bike also should be the self-balanced. so everyone can derive safely.
but this is a small projects prototype-based and you can do it in a day. it uses Arduino, accelerometer and some other electronic components. if you are going to use the accelerometer you should know the analog pin and its uses.
The idea of this project is straightforward we use Accelerometer mount over the robot which gives the 3-axis value. accelerometer associated with the Arduino. arduino gather information from the accelerometer and contrast the worth and the given condition. there are two conditions.
1.if robot tilt in forward direction then accelerometer gives some an incentive to the Arduino and Arduino give the guidance to the engine to move in reverse
2. in the event that robot tilt in reverse direction accelerometer gives some another incentive to the Arduino. arduino, offer guidance to move in sending bearing.
Required Components:-
1. Arduino
2. accelerometer
3. motor Driver
4. wires
to get more information and code visit here





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments