


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 4 | |||
 |
| × | 4 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Hey Friends..
I hope you're all doing fine..
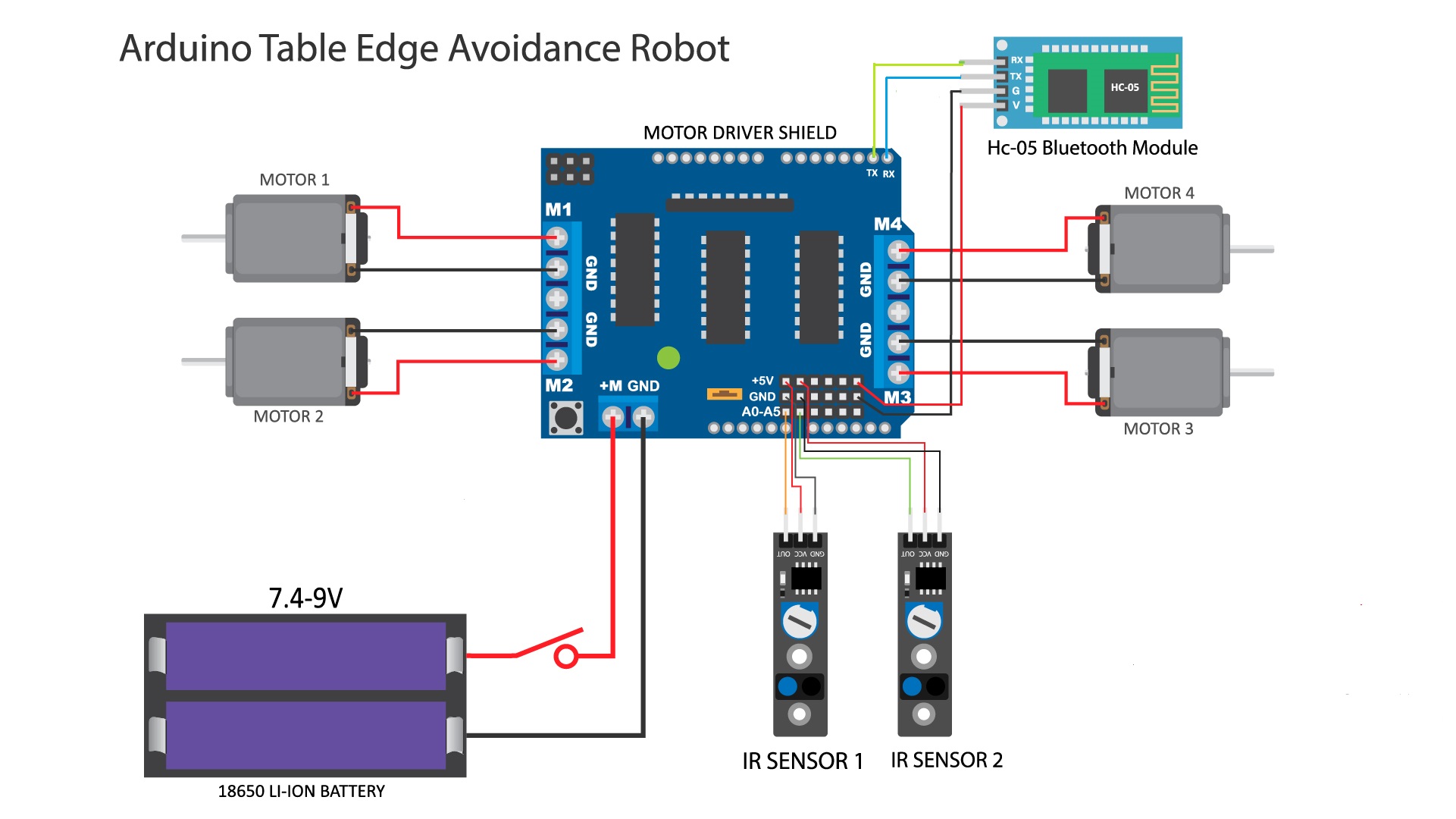
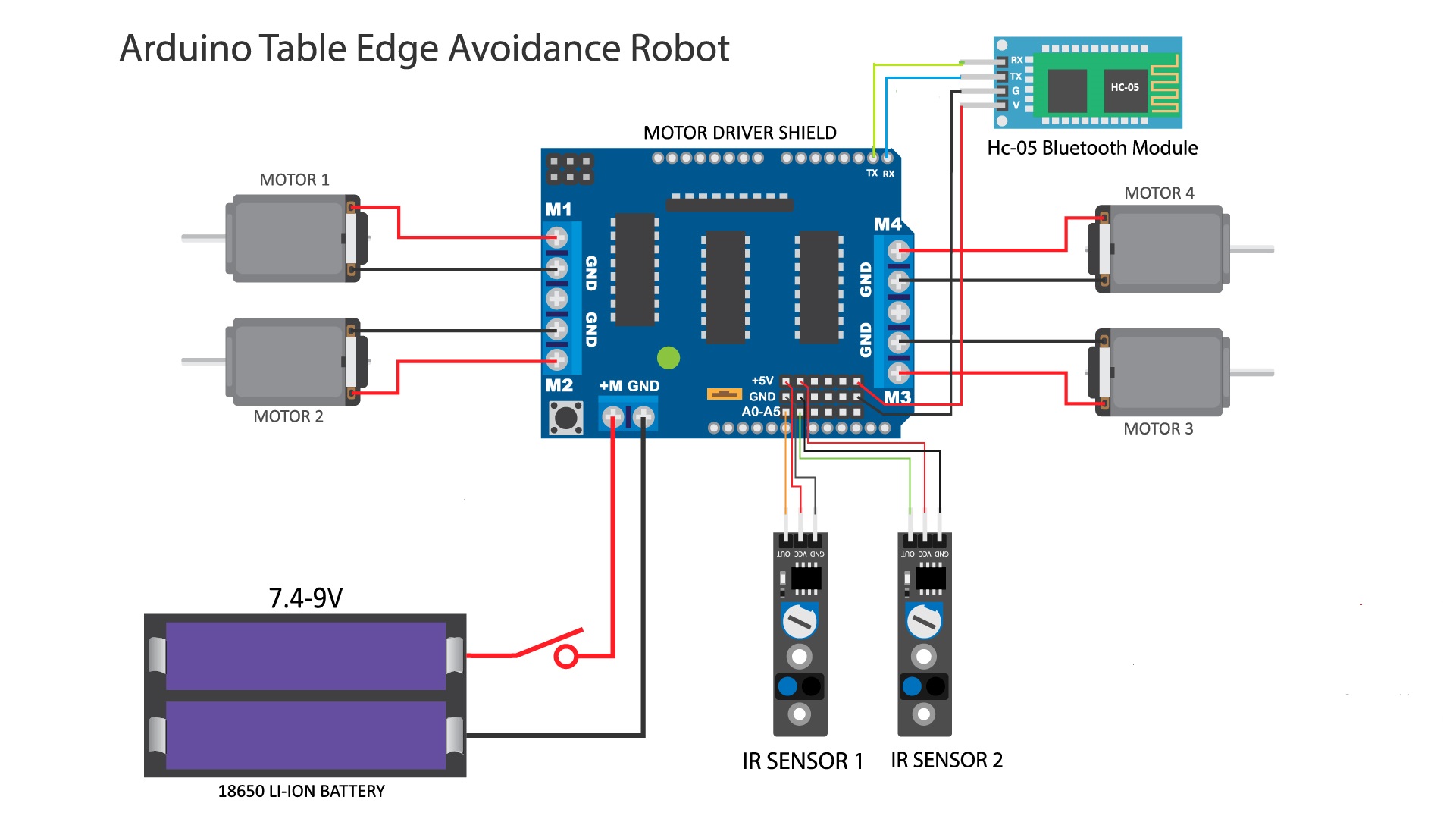
In this project I made a DIY Edge Avoider Robot.
Whenever there is an Edge this robot moves back automatically.
Whenever there is no edge this robot works normal with the Android Application.
Want to make yours..?
Watch the video to make yours.
If you like this project do comment on YouTube video, and do not forget to subscribe my channel, link is below
link is : https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
If you have any doubt regarding this project, you can Telegram me at +919557024177.
If you have any suggestions or project idea, kindly reach out to my channel or Telegram me at above no.
You're most welcome.
Steps to make this project:
1. Gather components.
2. Take car chassis and make robot car.
3. Place Arduino and L293D motor driver on it.
4. Place both IR sensors.
5. Connect Bluetooth module..
6. Do connections from circuit diagram.
7. Install Android app from below link.
8. Connect Hc-05
9. Open app and then play with car.
Your Project is done.
Do comment on the video and do share it.
Android App link : https://cutt.ly/1EKc75g
Download code and circuit from respective sections.


{kind=link}
Comments