
Hardware components | ||||||
_front_Ud6jOyWaCT.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
- This project is based on optical tracking, i.e. we shine a light from one of the directions on the sensor. The sensor detects the light and then commands the servo motor to move in the direction of the light.
- This idea can be further developed into a solar tracking system
- Solar tracking systems play an important and effective role in increasing the productivity of projects by moving the photovoltaic panels installed on them so that they face the sun directly throughout the day.
Another very important aspect that needs to be highlighted is that by using solar tracking systems, not only does the energy production increase, but these systems also improve the power generation curve and make it more stable. By using solar tracking systems, the time of maximum available power can be extended, so that more hours per day can be produced with a higher capacity.
We'll list the tools and modules used in this project:
1) Hexabitz Sensor Hub Module (H0AR9):
Sensor Hub is a Temperature, Humidity, Light, Color, Sound and Motion Sensor Hub module [1].
2) Hexabitz Power Supply Module (H03R0x):
Power Supply is a 3.3V / 1A DC-DC Buck Power Supply With Terminal Block or DC Jack Input module [2].
3) Servo Motor MG996R:
MG996R high torque metal gear dual ball bearing servo [3].
4) User Tools Kit:
- STLINK-V3MODS Programmer (H40Rx):
H40Rx is a programmer module which contains STLINK-V3MODS stand-alone debugging and programming mini probe for STM32 microcontrollers (Hexabitz modules and other MCUs) [4].
- E-Z-Hook Programming Kit:
Instead of soldering SMD connectors there, you could use a nice off-the-shelf E-Z-Hook kit that we assembled for you [5].
We'll mention step by step instructions from designing to implementing of the project:
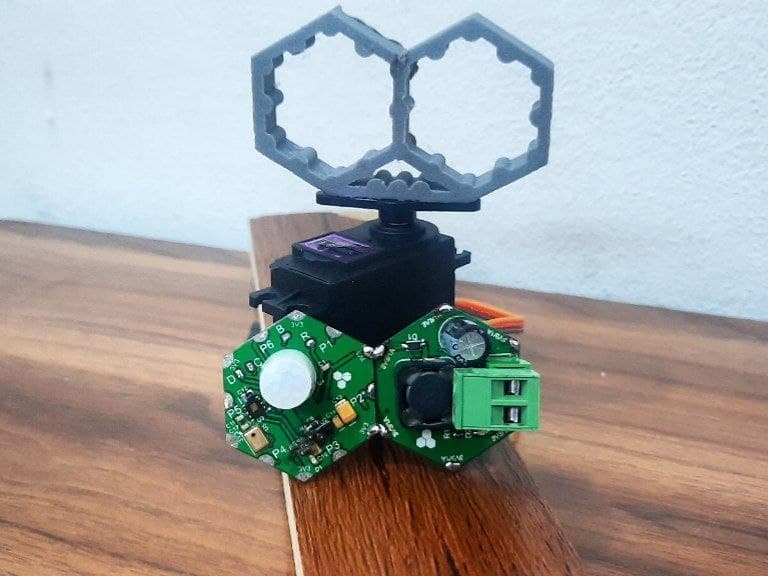
1. Assembling The Hardware:
2. Writing Codes With STM32CubeIDE Software:
Secondly, before you start writing the code, you should note that the UART function of the P5 has been cleared and the GPIO function has been enabled so that we can send commands from the module to the actuator.
Then we calibrate the required proportions according to the intensity of the desired color (white color) and then command the servo motor to rotate in the direction of the light.
Final Result:The following video shows the final results of our project.
References:[1]: Temperature, Humidity, Light, Color, Sound and Motion Sensor Hub (H0AR9x) – Hexabitz
[2]: 3.3V/1A DC-DC Power Supply (H03R0x) – Hexabitz
[3]: MG996R Tower-Pro (electronicoscaldas.com)






Comments