#include "Particle.h"
#include "Adafruit_BME280.h"
#include "Adafruit_SSD1306.h"
#include "Colors.h"
#include "Encoder.h"
#include "IoTClassroom_CNM.h"
// Let Device OS manage the connection to the Particle Cloud
SYSTEM_MODE(MANUAL);
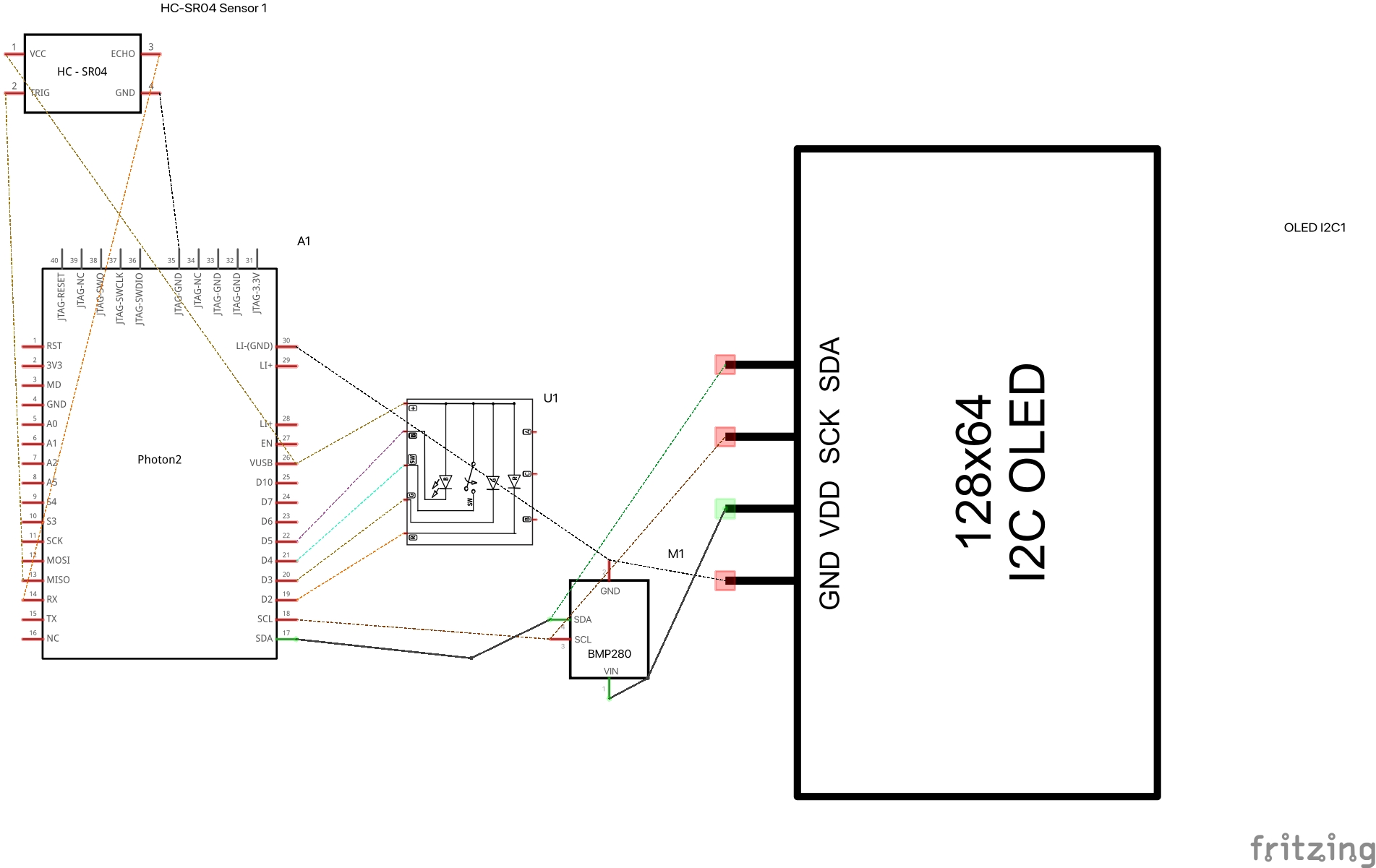
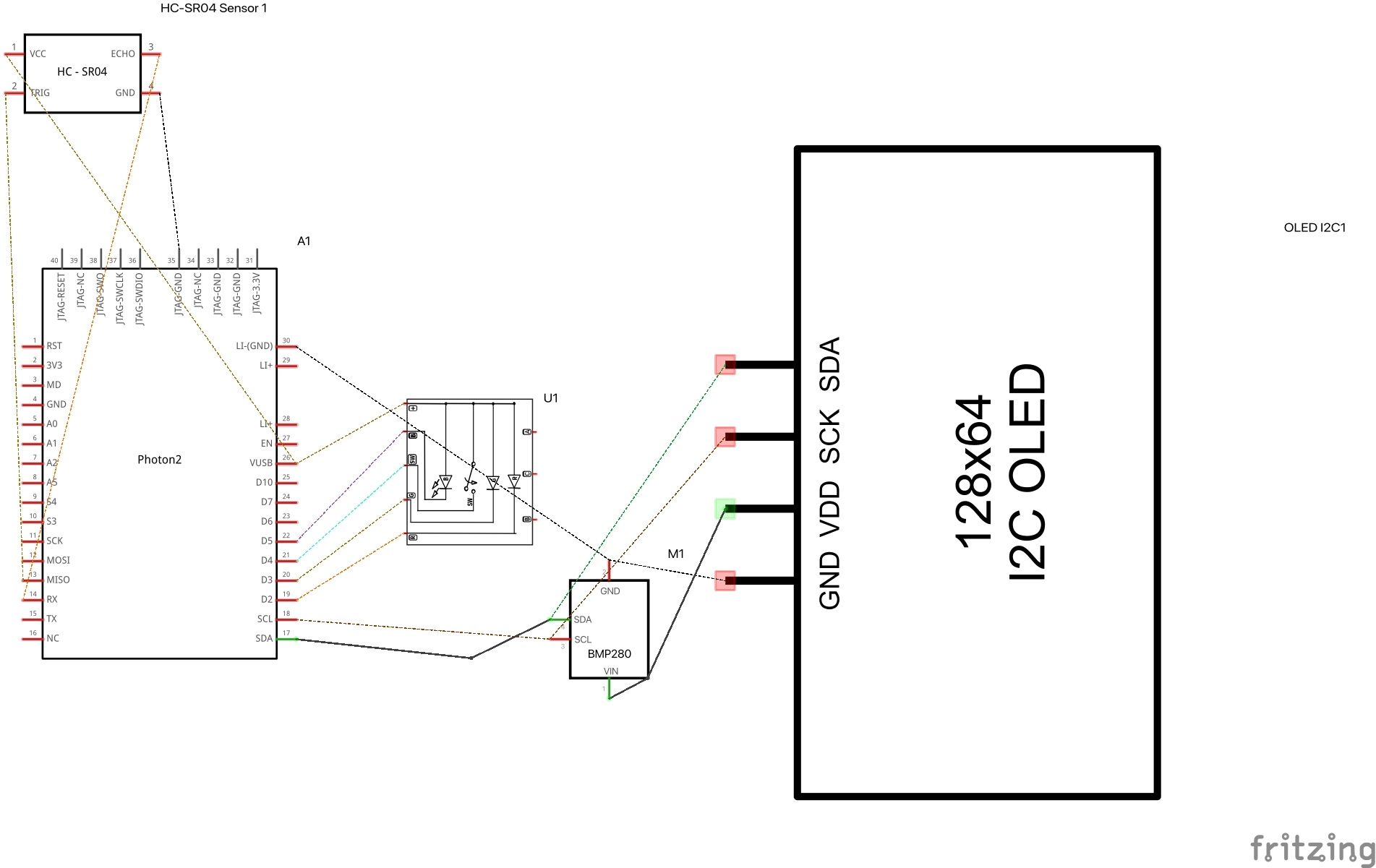
const int trigPin = D16;
const int echoPin = D9;
float duration, distance;
Adafruit_BME280 bme;
const int OLED_RESET=-1;
Adafruit_SSD1306 display(OLED_RESET);
int currentTime;
int lastSec;
int status;
int lastSecond;
int i;
int position;
const int brightness=255;
Encoder myEnc(D17,D15);
int inputValue;
int LEDSwitch;
const int Switch=D6;
const int REDLED=D4;
const int GREENLED=D5;
const int BLUELED=D7;
const int BULB=2;
int perviousPosition;
int pp;
int color;
bool on,off;
const int ENCODERPIN=D6;
Button greybutton(ENCODERPIN);
int PP;
const int MYWEMO=1;
const int MYWEMO1=2;
int BUTTON_PIN=D14;
bool buttonstate;
Button whitebutton(BUTTON_PIN);
int mode;
int timer;
int CURRENTTIME;
void setup() {
Serial.begin(9600);
waitFor(Serial.isConnected,15000);
WiFi.on();
WiFi.clearCredentials();
WiFi.setCredentials("IoTNetwork");
WiFi.connect();
while(WiFi.connecting()) {
Serial.printf(".");
}
Serial.printf("\n\n");
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
status=bme.begin(0x76);
Serial.begin (9600);
waitFor (Serial .isConnected ,10000);
Serial.println ("ready to go");
if (status == false) {
Serial.printf("BME280 at address 0x%02X failed to start", 0x76);
}
waitFor(Serial.isConnected,10000);
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
display.display();
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
pinMode(GREENLED,OUTPUT);
pinMode(REDLED,OUTPUT);
}
// loop() runs over and over again, as quickly as it can execute.
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(5000);
digitalWrite(trigPin, HIGH);
delayMicroseconds(5000);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration*.0343)/2;
Serial.print("Distance: ");
Serial.println(distance);
delayMicroseconds(5000);
CURRENTTIME = millis();
if((CURRENTTIME-timer)>9000){
timer = millis();
if (distance<=100)
{
setHue(BULB,true,HueRainbow[color%7],pp,250);
digitalWrite(GREENLED,LOW);
digitalWrite(REDLED,HIGH);
Serial.printf("led color = %i,\n",inputValue);
}
else
{
setHue(BULB,false,HueRainbow[color%7],pp,250);
digitalWrite(REDLED,LOW);
digitalWrite(GREENLED,HIGH);
}
}
currentTime = millis();
if((currentTime-lastSec)>2000){
lastSec = millis();
float tempC = bme.readTemperature();
float tempF= 1.8*tempC+32;
float pressPA = bme.readPressure();
float inHg= 1/3386.0*pressPA+5;
float humidRH = bme.readHumidity();
Serial.printf("Temperature%0.2f\n,Pressure%0.2f\n,Humidity%0.2f\n" ,tempF,pressPA,humidRH );
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.printf("Temperature%0.2f\n,Pressure%0.2f\n,Humidity%0.2f\n" ,tempF,pressPA,humidRH );
display.display();
display.clearDisplay();
}
position = myEnc.read();
if (position!=perviousPosition)
{
pp=2.6*position;
Serial.printf("i = %d,\n",position);
perviousPosition= position;
setHue(BULB,true,HueRainbow[color%7],pp,255);
}
if (position >brightness)
{
position =brightness;
myEnc.write(brightness);
Serial.printf("i = %d,\n",position);
}
if (position <0)
{
position=0;
myEnc.write(0);
Serial.printf("i = %d,\n",position);
}
analogWrite(Switch,inputValue);
position =myEnc.read();
inputValue = digitalRead(D3);
Serial.printf("button state = %i,\n",inputValue);
if(greybutton.isClicked()){
on =!on;
Serial.printf("Setting color of bulb %i to color %06i\n",BULB,HueRainbow[color%7]);
setHue(BULB,true,HueRainbow[color%7],pp,255);
color++;
if (on)
{
setHue(BULB,true,HueRainbow[color%7],pp,255);
color++;
}
else
{
setHue(BULB,false,HueRainbow[color%7],pp,255);
}
}
if(whitebutton.isClicked()){
on =!on;
if ( mode>3)
{
mode=0;
}
if((mode==0)){
wemoWrite(MYWEMO,HIGH);
wemoWrite(MYWEMO1,LOW);
}
if((mode==1)){
wemoWrite(MYWEMO,HIGH);
wemoWrite(MYWEMO1,HIGH);
}
if((mode==2)){
wemoWrite(MYWEMO,LOW);
wemoWrite(MYWEMO1,HIGH);
}
if((mode==3)){
wemoWrite(MYWEMO,LOW);
wemoWrite(MYWEMO1,LOW);
}
mode++;
Serial.printf("mode %i\n",mode);
Serial.printf("Turning on Wemo# %i\n",MYWEMO);
}
}








{kind=link}
Comments