// Luftdruck Ausgabe aktuell
// Luftdruckdifferenz wird mit 1 und 3 Stunden vorher (im EEPROM) verglichen und ausgegeben
// Temperatur Ausgabe aktuell
//
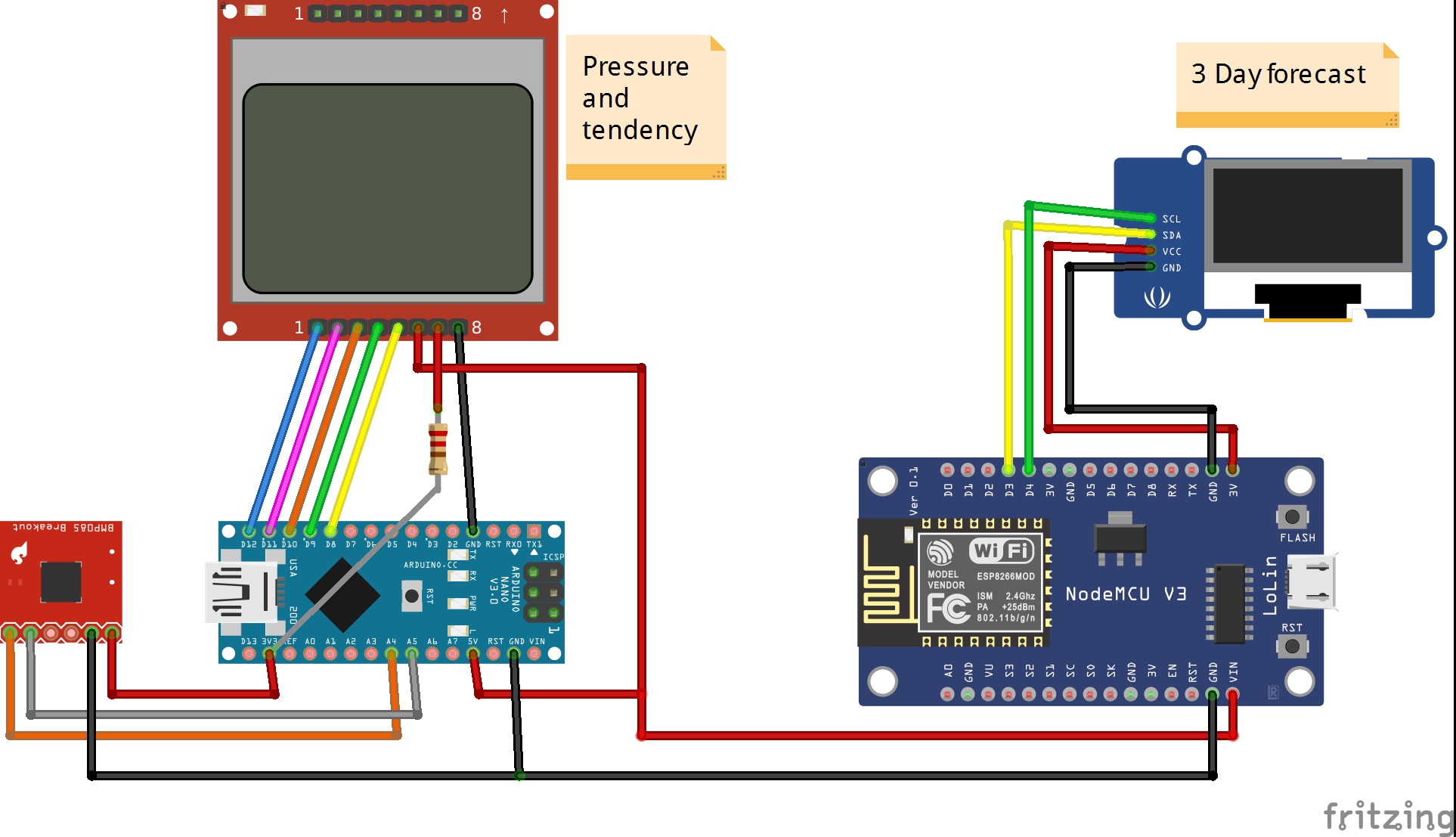
// Bauteile:
// LCD Display vom Nokia 5110
// BMP180 Luftdrucksensor
// Arduino Uno
//
// Matthias Busse Version 1.0 vom 21.9.2014
#include < Wire.h>
#include < avr/sleep.h>
#include < EEPROM.h>
// EEPROM Variablen
int eepromAdresse=0, eepromMax=1023; // 1024 EEPROM Speicherplatze, 0-1023
int eepromOldAdr, eepromDif1=60, eepromDif3=180; // 60/180 Speicherplatze (Minuten) zuruck vergleichen
// BMP180 Variablen
#define I2C_ADDRESS 0x77
const unsigned char oversampling_setting = 3; //oversamplig: 0 ungenau (13ms) ... 3 genau (34ms)
const unsigned char pressure_waittime[4] = { 5, 8, 14, 26 }; // lt. Datenblatt BMP-180
int ac1, ac2, ac3, b1, b2, mb, mc, md;
unsigned int ac4, ac5, ac6;
int temp = 20, temp_mittel=200, test=0;
long druck = 1013, druck_mittel=101300;
float t, temp_offset=0.0, d, dAlt, dDiff, druck_offset=2.0;
int zeitabgl=0, mitteln=5;
char tstring[5], dstring[7];
// Power Down Variablen
volatile int sleepcounter = 0; // Schlafzyklen mitzahlen
// Display Variablen
static const byte ASCII[][5] = {// ASCII Tabelle mit Fonts
{0x00, 0x00, 0x00, 0x00, 0x00} // 20
,{0x00, 0x00, 0x5f, 0x00, 0x00} // 21 !
,{0x00, 0x07, 0x00, 0x07, 0x00} // 22 "
,{0x14, 0x7f, 0x14, 0x7f, 0x14} // 23 #
,{0x24, 0x2a, 0x7f, 0x2a, 0x12} // 24 $
,{0x23, 0x13, 0x08, 0x64, 0x62} // 25 %
,{0x36, 0x49, 0x55, 0x22, 0x50} // 26 &
,{0x00, 0x05, 0x03, 0x00, 0x00} // 27 '
,{0x00, 0x1c, 0x22, 0x41, 0x00} // 28 (
,{0x00, 0x41, 0x22, 0x1c, 0x00} // 29 )
,{0x14, 0x08, 0x3e, 0x08, 0x14} // 2a *
,{0x08, 0x08, 0x3e, 0x08, 0x08} // 2b +
,{0x00, 0x50, 0x30, 0x00, 0x00} // 2c ,
,{0x08, 0x08, 0x08, 0x08, 0x08} // 2d -
,{0x00, 0x60, 0x60, 0x00, 0x00} // 2e .
,{0x20, 0x10, 0x08, 0x04, 0x02} // 2f /
,{0x3e, 0x51, 0x49, 0x45, 0x3e} // 30 0
,{0x00, 0x42, 0x7f, 0x40, 0x00} // 31 1
,{0x42, 0x61, 0x51, 0x49, 0x46} // 32 2
,{0x21, 0x41, 0x45, 0x4b, 0x31} // 33 3
,{0x18, 0x14, 0x12, 0x7f, 0x10} // 34 4
,{0x27, 0x45, 0x45, 0x45, 0x39} // 35 5
,{0x3c, 0x4a, 0x49, 0x49, 0x30} // 36 6
,{0x01, 0x71, 0x09, 0x05, 0x03} // 37 7
,{0x36, 0x49, 0x49, 0x49, 0x36} // 38 8
,{0x06, 0x49, 0x49, 0x29, 0x1e} // 39 9
,{0x00, 0x36, 0x36, 0x00, 0x00} // 3a :
,{0x00, 0x56, 0x36, 0x00, 0x00} // 3b ;
,{0x08, 0x14, 0x22, 0x41, 0x00} // 3c <
,{0x14, 0x14, 0x14, 0x14, 0x14} // 3d =
,{0x00, 0x41, 0x22, 0x14, 0x08} // 3e >
,{0x02, 0x01, 0x51, 0x09, 0x06} // 3f ?
,{0x32, 0x49, 0x79, 0x41, 0x3e} // 40 @
,{0x7e, 0x11, 0x11, 0x11, 0x7e} // 41 A
,{0x7f, 0x49, 0x49, 0x49, 0x36} // 42 B
,{0x3e, 0x41, 0x41, 0x41, 0x22} // 43 C
,{0x7f, 0x41, 0x41, 0x22, 0x1c} // 44 D
,{0x7f, 0x49, 0x49, 0x49, 0x41} // 45 E
,{0x7f, 0x09, 0x09, 0x09, 0x01} // 46 F
,{0x3e, 0x41, 0x49, 0x49, 0x7a} // 47 G
,{0x7f, 0x08, 0x08, 0x08, 0x7f} // 48 H
,{0x00, 0x41, 0x7f, 0x41, 0x00} // 49 I
,{0x20, 0x40, 0x41, 0x3f, 0x01} // 4a J
,{0x7f, 0x08, 0x14, 0x22, 0x41} // 4b K
,{0x7f, 0x40, 0x40, 0x40, 0x40} // 4c L
,{0x7f, 0x02, 0x0c, 0x02, 0x7f} // 4d M
,{0x7f, 0x04, 0x08, 0x10, 0x7f} // 4e N
,{0x3e, 0x41, 0x41, 0x41, 0x3e} // 4f O
,{0x7f, 0x09, 0x09, 0x09, 0x06} // 50 P
,{0x3e, 0x41, 0x51, 0x21, 0x5e} // 51 Q
,{0x7f, 0x09, 0x19, 0x29, 0x46} // 52 R
,{0x46, 0x49, 0x49, 0x49, 0x31} // 53 S
,{0x01, 0x01, 0x7f, 0x01, 0x01} // 54 T
,{0x3f, 0x40, 0x40, 0x40, 0x3f} // 55 U
,{0x1f, 0x20, 0x40, 0x20, 0x1f} // 56 V
,{0x3f, 0x40, 0x38, 0x40, 0x3f} // 57 W
,{0x63, 0x14, 0x08, 0x14, 0x63} // 58 X
,{0x07, 0x08, 0x70, 0x08, 0x07} // 59 Y
,{0x61, 0x51, 0x49, 0x45, 0x43} // 5a Z
,{0x00, 0x7f, 0x41, 0x41, 0x00} // 5b [
,{0x02, 0x04, 0x08, 0x10, 0x20} // 5c ?
,{0x00, 0x41, 0x41, 0x7f, 0x00} // 5d ]
,{0x04, 0x02, 0x01, 0x02, 0x04} // 5e ^
,{0x40, 0x40, 0x40, 0x40, 0x40} // 5f _
,{0x00, 0x01, 0x02, 0x04, 0x00} // 60 `
,{0x20, 0x54, 0x54, 0x54, 0x78} // 61 a
,{0x7f, 0x48, 0x44, 0x44, 0x38} // 62 b
,{0x38, 0x44, 0x44, 0x44, 0x20} // 63 c
,{0x38, 0x44, 0x44, 0x48, 0x7f} // 64 d
,{0x38, 0x54, 0x54, 0x54, 0x18} // 65 e
,{0x08, 0x7e, 0x09, 0x01, 0x02} // 66 f
,{0x0c, 0x52, 0x52, 0x52, 0x3e} // 67 g
,{0x7f, 0x08, 0x04, 0x04, 0x78} // 68 h
,{0x00, 0x44, 0x7d, 0x40, 0x00} // 69 i
,{0x20, 0x40, 0x44, 0x3d, 0x00} // 6a j
,{0x7f, 0x10, 0x28, 0x44, 0x00} // 6b k
,{0x00, 0x41, 0x7f, 0x40, 0x00} // 6c l
,{0x7c, 0x04, 0x18, 0x04, 0x78} // 6d m
,{0x7c, 0x08, 0x04, 0x04, 0x78} // 6e n
,{0x38, 0x44, 0x44, 0x44, 0x38} // 6f o
,{0x7c, 0x14, 0x14, 0x14, 0x08} // 70 p
,{0x08, 0x14, 0x14, 0x18, 0x7c} // 71 q
,{0x7c, 0x08, 0x04, 0x04, 0x08} // 72 r
,{0x48, 0x54, 0x54, 0x54, 0x20} // 73 s
,{0x04, 0x3f, 0x44, 0x40, 0x20} // 74 t
,{0x3c, 0x40, 0x40, 0x20, 0x7c} // 75 u
,{0x1c, 0x20, 0x40, 0x20, 0x1c} // 76 v
,{0x3c, 0x40, 0x30, 0x40, 0x3c} // 77 w
,{0x44, 0x28, 0x10, 0x28, 0x44} // 78 x
,{0x0c, 0x50, 0x50, 0x50, 0x3c} // 79 y
,{0x44, 0x64, 0x54, 0x4c, 0x44} // 7a z
,{0x00, 0x08, 0x36, 0x41, 0x00} // 7b {
,{0x00, 0x00, 0x7f, 0x00, 0x00} // 7c |
,{0x00, 0x41, 0x36, 0x08, 0x00} // 7d }
,{0x10, 0x08, 0x08, 0x10, 0x08} // 7e <
,{0x78, 0x46, 0x41, 0x46, 0x78} // 7f >
};
#define RST 12
#define CE 11
#define DC 10
#define DIN 9
#define CLK 8
void setup(){
for(int i=0; i < eepromMax; i+=4) // EEPROM alles zu null
eepromWriteLong(0,i);
// Power Down Einstellungen
watchdogOn(); // Watchdog timer einschalten.
ADCSRA = ADCSRA & B01111111; // ADC abschalten, ADEN bit7 zu 0
ACSR = B10000000; // Analogen Comparator abschalten, ACD bit7 zu 1
DIDR0 = DIDR0 | B00111111; // Digitale Eingangspuffer ausschalten, analoge Eingangs Pins 0-5 auf 1
Wire.begin(); // BMP180 Einstellungen
bmp180_get_cal_data();
bmp180_read_temperature_and_pressure(&temp_mittel,&druck_mittel); // erstmal Mittelwerte lesen
pinMode(RST, OUTPUT); // 5110 Display Einstellungen
pinMode(CE, OUTPUT);
pinMode(DC, OUTPUT);
pinMode(DIN, OUTPUT);
pinMode(CLK, OUTPUT);
digitalWrite(RST, LOW);
digitalWrite(RST, HIGH);
LcdWriteCmd(0x21); // LCD extended commands
LcdWriteCmd(0xB8); // set LCD Vop (contrast)
LcdWriteCmd(0x04); // set temp coefficent
LcdWriteCmd(0x14); // LCD bias mode 1:40
LcdWriteCmd(0x20); // LCD basic commands
LcdWriteCmd(0x0C); // LCD normal video
LcdClearScreen();
}
void loop() {
bmp180_read_temperature_and_pressure(&temp, &druck); // dauert ca. 51ms
temp_mittel = ((temp_mittel * (mitteln-1)) + temp) / mitteln;
druck_mittel = ((druck_mittel * (mitteln-1)) + druck) / mitteln;
t=((float)temp_mittel/10.0)+temp_offset;
d=((float)druck_mittel/100.0)+druck_offset;
LcdClearLine(0);
LcdXY(12,0);
LcdWriteString(dtostrf(d,7,2,dstring));
LcdXY(60,0);
LcdWriteString("hPa");
eepromWriteLong(d*100, eepromAdresse); // Druck im EEPROM abspeichern mit 2 Kommastellen (*100 long)
eepromOldAdr=eepromAdresse -(eepromDif1*4); // Diff 1h zuruck gehen
if(eepromOldAdr < 0) eepromOldAdr = eepromMax + 1 + eepromOldAdr; // uberlauf
dAlt=(float)eepromReadLong(eepromOldAdr)/100.0; // alten Wert lesen
dDiff=d-dAlt; // Differenz bilden
LcdClearLine(2);
LcdXY(8,2); // Ausgeben
LcdWriteString("1h:");
if(dAlt > 800) {
LcdXY(27,2);
if(dDiff < 0.0) LcdWriteString("-");
else LcdWriteString("+");
if(dDiff < 0.0) dDiff=dDiff*-1.0; // Absolutwert
LcdXY(34,2);
LcdWriteString(dtostrf(dDiff,4,2,dstring));
}
LcdXY(60,2);
LcdWriteString("hPa");
eepromOldAdr=eepromAdresse -(eepromDif3*4); // Diff 3h zuruck gehen
if(eepromOldAdr < 0) eepromOldAdr = eepromMax + 1 + eepromOldAdr; // uberlauf
dAlt=(float)eepromReadLong(eepromOldAdr)/100.0; // alten Wert lesen
dDiff=d-dAlt; // Differenz bilden
LcdClearLine(3);
LcdXY(8,3); // Ausgeben
LcdWriteString("3h:");
if(dAlt > 800) {
LcdXY(27,3);
if(dDiff < 0.0) LcdWriteString("-");
else LcdWriteString("+");
if(dDiff < 0.0) dDiff=dDiff*-1.0; // Absolutwert
LcdXY(34,3);
LcdWriteString(dtostrf(dDiff,4,2,dstring));
}
LcdXY(60,3);
LcdWriteString("hPa");
LcdClearLine(5); // Temperatur ausgeben
LcdXY(8,5);
LcdWriteString("Temp. ");
LcdXY(43,5);
LcdWriteString(dtostrf(t,4,1,tstring));
LcdXY(73,5);
LcdWriteString("C");
eepromAdresse += 4;
if(eepromAdresse > eepromMax) eepromAdresse=0;
pwrDown(54); // ATmega328 fahrt runter fur den Rest der 60 Sekunden
}
void eepromWriteLong(long lo, int adr) {
// long Wert in das EEPROM schreiben
// Eingabe : adr Speicherplatz
// Eingabe : lo Zahl, Wertebereich -2.147.483.648 bis 2.147.483.647
//
// Matthias Busse 23.5.2014 Version 1.0
byte by;
for(int i=0;i < 4;i++) {
by = (lo >> ((3-i)*8)) & 0x000000ff;
EEPROM.write(adr+i, by);
}
} // eepromWriteLong
long eepromReadLong(int adr) {
// long int Wert aus 4 Byte EEPROM lesen
// Eingabe : adr bis adr+3
// Ausgabe : long Wert
//
// Matthias Busse 23.5.2014 Version 1.0
long lo=0;
for(int i=0;i < 3;i++){
lo += EEPROM.read(adr+i);
lo = lo << 8;
}
lo += EEPROM.read(adr+3);
return lo;
} // eepromReadLong
void LcdWriteString(char *characters) {
// String ausgeben
while(*characters) LcdWriteCharacter(*characters++);
}
void LcdWriteCharacter(char character) {
// ASCII Zeichen ausgeben aus der Tabelle oben
for(int i=0; i < 5; i++) LcdWriteData(ASCII[character - 0x20][i]);
LcdWriteData(0x00);
}
void LcdWriteCmd(byte cmd){
// Kommando an Display senden
digitalWrite(DC, LOW); //DC pin is low for commands
digitalWrite(CE, LOW);
shiftOut(DIN, CLK, MSBFIRST, cmd); //transmit serial data
digitalWrite(CE, HIGH);
}
void LcdWriteData(byte cmd){
// Daten an Display senden
digitalWrite(DC, HIGH); //DC pin is high for data
digitalWrite(CE, LOW);
shiftOut(DIN, CLK, MSBFIRST, cmd); //transmit serial data
digitalWrite(CE, HIGH);
}
void LcdClearScreen() {
// Bildschirm leeren
for(int i=0; i < 504; i++)
LcdWriteData(0x00);
}
void LcdClearLine(int line) {
// Zeile leeren
LcdXY(0, line);
for(int i=0; i < 84; i++)
LcdWriteData(0x00);
}
void LcdXY(int x, int y) {
// an X / Y Position gehen
LcdWriteCmd(0x80|x); // Spalte
LcdWriteCmd(0x40|y); // Zeile
}
void bmp180_read_temperature_and_pressure(int* temp, long* druck) {
int ut= bmp180_read_ut();
long up = bmp180_read_up();
long x1, x2, x3, b3, b5, b6, p;
unsigned long b4, b7;
x1 = ((long)ut - ac6) * ac5 >> 15; //Temperatur berechnen
x2 = ((long) mc << 11) / (x1 + md);
b5 = x1 + x2;
*temp = (b5 + 8) >> 4;
b6 = b5 - 4000; //Druck berechnen
x1 = (b2 * (b6 * b6 >> 12)) >> 11;
x2 = ac2 * b6 >> 11;
x3 = x1 + x2;
if (oversampling_setting == 3) b3 = ((int32_t) ac1 * 4 + x3 + 2) << 1;
if (oversampling_setting == 2) b3 = ((int32_t) ac1 * 4 + x3 + 2);
if (oversampling_setting == 1) b3 = ((int32_t) ac1 * 4 + x3 + 2) >> 1;
if (oversampling_setting == 0) b3 = ((int32_t) ac1 * 4 + x3 + 2) >> 2;
x1 = ac3 * b6 >> 13;
x2 = (b1 * (b6 * b6 >> 12)) >> 16;
x3 = ((x1 + x2) + 2) >> 2;
b4 = (ac4 * (uint32_t) (x3 + 32768)) >> 15;
b7 = ((uint32_t) up - b3) * (50000 >> oversampling_setting);
p = b7 < 0x80000000 ? (b7 * 2) / b4 : (b7 / b4) * 2;
x1 = (p >> 8) * (p >> 8);
x1 = (x1 * 3038) >> 16;
x2 = (-7357 * p) >> 16;
*druck = p + ((x1 + x2 + 3791) >> 4);
}
unsigned int bmp180_read_ut() {
write_register(0xf4,0x2e);
delay(5); //mehr als 4.5 ms
return read_int_register(0xf6);
}
void bmp180_get_cal_data() {
ac1 = read_int_register(0xAA);
ac2 = read_int_register(0xAC);
ac3 = read_int_register(0xAE);
ac4 = read_int_register(0xB0);
ac5 = read_int_register(0xB2);
ac6 = read_int_register(0xB4);
b1 = read_int_register(0xB6);
b2 = read_int_register(0xB8);
mb = read_int_register(0xBA);
mc = read_int_register(0xBC);
md = read_int_register(0xBE);
}
long bmp180_read_up() {
write_register(0xf4,0x34+(oversampling_setting<<6));
delay(pressure_waittime[oversampling_setting]);
unsigned char msb, lsb, xlsb;
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(0xf6);
Wire.endTransmission();
Wire.requestFrom(I2C_ADDRESS, 3);
while(!Wire.available()) {} // warten
msb = Wire.read();
while(!Wire.available()) {} // warten
lsb |= Wire.read();
while(!Wire.available()) {} // warten
xlsb |= Wire.read();
return (((long)msb<<16) | ((long)lsb<<8) | ((long)xlsb)) >>(8-oversampling_setting);
}
void write_register(unsigned char r, unsigned char v) {
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(r);
Wire.write(v);
Wire.endTransmission();
}
char read_register(unsigned char r) {
unsigned char v;
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(r);
Wire.endTransmission();
Wire.requestFrom(I2C_ADDRESS, 1);
while(!Wire.available()) {} // warten
v = Wire.read();
return v;
}
int read_int_register(unsigned char r) {
unsigned char msb, lsb;
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(r);
Wire.endTransmission();
Wire.requestFrom(I2C_ADDRESS, 2);
while(!Wire.available()) {} // warten
msb = Wire.read();
while(!Wire.available()) {} // warten
lsb = Wire.read();
return (((int)msb<<8) | ((int)lsb));
}
void pwrDown(int sekunden) {
set_sleep_mode(SLEEP_MODE_PWR_DOWN); // den tiefsten Schlaf auswahlen PWR_DOWN
for(int i=0; i < sekunden; i++) {
sleep_enable(); // sleep mode einschalten
sleep_mode(); // in den sleep mode gehen
sleep_disable(); // sleep mode ausschalten nach dem Erwachen
} // for
}
void watchdogOn() {
MCUSR = MCUSR & B11110111; // Reset flag ausschalten, WDRF bit3 vom MCUSR.
WDTCSR = WDTCSR | B00011000; // Bit 3+4 um danach den Prescaler setzen zu konnen
WDTCSR = B00000110; // Watchdog Prescaler auf 128k setzen > ergibt ca. 1 Sekunde
WDTCSR = WDTCSR | B01000000; // Watchdog Interrupt einschalten
MCUSR = MCUSR & B11110111;
}
ISR(WDT_vect) {
sleepcounter ++; // Schlafzyklen mitzahlen
}













{kind=link}
Comments