

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
This time I will show you how to make Arduino-based ultrasonic radar. We could call it a Sonar because it is using sound, however, sonars are generally considered for use underwater. In this case, it is interesting that are used two sensors to scan the entire 360-degree space. Ultrasonic sensor modules are mounted on a servo motor that rotates between 0 and 180°. This method also simplifies the design because you don’t have the problem of cables getting tangled around the servo.
Head to: https://bit.ly/3DQGHBn to make your PCB. $50 coupon for new users
The process starts with a test of the servo rotation. First, it rotates a 0° to 180° and then 180° to 0° to check the correct movement of the headset. The process starts with a test of the servo rotation. First, it rotates a 0° to 180° and then 180° to 0° to check the correct movement of the headset. The process starts with a test of the servo rotation. First, it rotates a 0° to 180° and then 180° to 0° to check the correct movement of the headset.
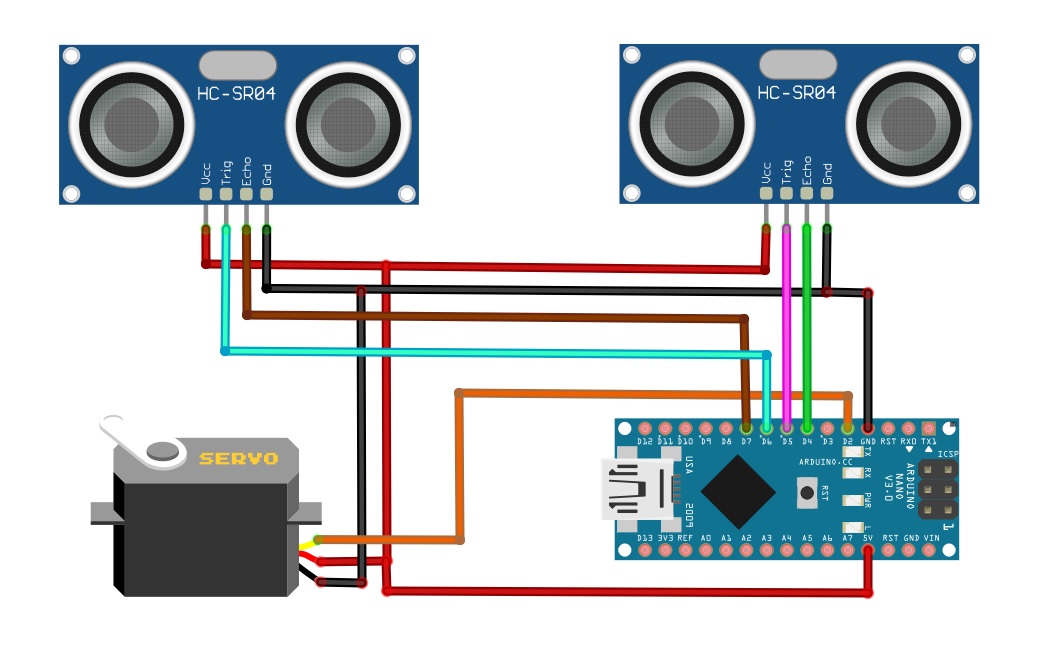
The device is extremely simple to build and consists of several elements:
- Arduino Nano Microcontroller
- Small 9g servo motor
- and two HC-SR04 Ultrasonic modules
At startup, is tested the movement of the servo motor. Immediately after that, the radar starts scanning. Next, we start the Processing application on the PC, and then we need to enter the correct serial port through which the Arduino communicates. This displays a Radar-like monitor on which the objects are being monitored. Let me mention that the idea and the code are the work of Victor Casado, an Electronics Engineering Student from Spain. It can be seen in the pictures that the device also contains a piezo Buzzer. This is because I am currently testing modified code and depending on the distance of an object, is emitted soundwith a certain frequency. If it succeeds, I will publish the new code in the form of an update.
Finally, the device is built into a suitable box made of PVC board with thicknesses of 3 and 5 mm and coated with self-adhesive colored wallpaper.



{kind=link}
Comments