int x,y,tempX,tempY; // Variables To Store X-Y Coordinates
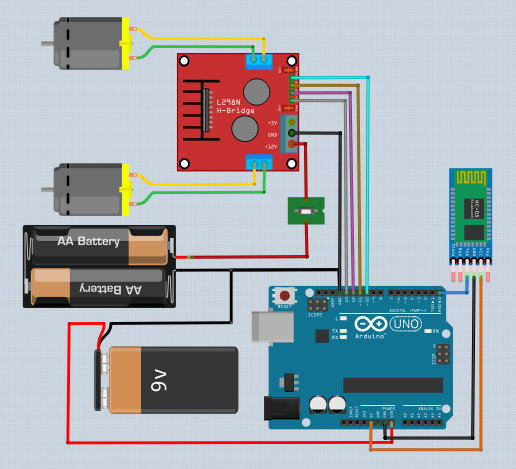
const int r1=13,r2=12,l1=11,l2=10; // Motor Control Pins
void setup()
{
Serial.begin(9600); // Set Baud-Rate At 9600
pinMode(r1,OUTPUT); // Set Motor Control Pins As O/P
pinMode(r2,OUTPUT);
pinMode(l1,OUTPUT);
pinMode(l2,OUTPUT);
}
void loop()
{
while(Serial.available()>0)
{
x= Serial.parseInt(); // Capture X Coordinate
y= Serial.parseInt(); // Capture Y Coordinate
tempX = map(x,-100,100,0,200); // Map Value Of X Coordinate
tempY = map(y,-100,100,0,200); // Map Value Of Y Coordinate
if(tempX<90)
{
if (tempY>90 && tempY<110)
{
foward(); // Move Forward
}
}
if(tempX>110)
{
if (tempY>90 && tempY<110)
{
reverse(); // Move Backward
}
}
if(tempX>90 && tempX<110)
{
if (tempY>110)
{
left(); // Turn Left
}
else if (tempY<90)
{
right() ; // Turn Right
}
}
if (tempX>90 && tempX<110)
{
if (tempY>90 && tempY<110)
{
brake(); // Stop
}
}
}
}
void foward ()
{
digitalWrite(r2,HIGH);
digitalWrite(r1,LOW);
digitalWrite(l2,HIGH);
digitalWrite(l1,LOW);
}
void reverse()
{
digitalWrite(r2,LOW);
digitalWrite(r1,HIGH);
digitalWrite(l2,LOW);
digitalWrite(l1,HIGH);
}
void right()
{
digitalWrite(r2,LOW);
digitalWrite(r1,HIGH);
digitalWrite(l2,HIGH);
digitalWrite(l1,LOW);
}
void left()
{
digitalWrite(r2,HIGH);
digitalWrite(r1,LOW);
digitalWrite(l2,LOW);
digitalWrite(l1,HIGH);
}
void brake()
{
digitalWrite(r2,LOW);
digitalWrite(r1,LOW);
digitalWrite(l2,LOW);
digitalWrite(l1,LOW);
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)












_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments