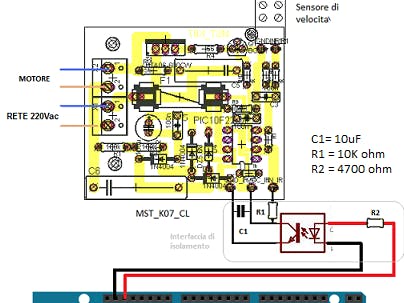
The MST_K07 permits to control an AC universal motor ( brushed motor) maintaining the rotation speed when the load changes. It controls the torque of the motor. To do it, it is needed that the motor has a speed rotation sensor. This regulator is full suitable with wash motor such as MC3064. So it is very interesting to control an universal AC motor using an Arduino board because it is possible to implement many features such as turn on /off the motor when the arduino board recevies an external signal ( coming from sensor or swicth) or to change the speed rotation using a defined profile.
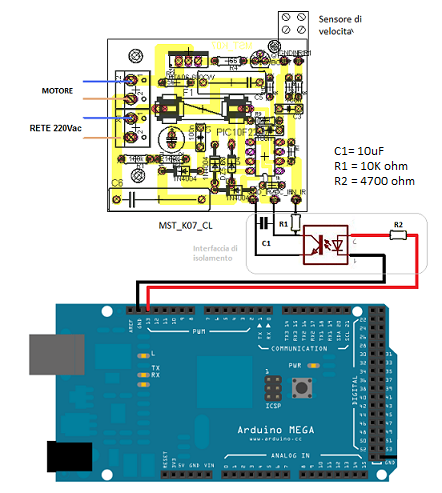
The MST_K07_CL controller can be remotely controlled from a PC using an Arduino board and an isolation board as shown in the figure. Compared to the standard version, the MST_K07_CL regulator is not equipped with a potentiometer because the regulation level setting function is obtained by sending a PWM signal to the voltage input that defines the regulation level. Changing the duty cycle of the PWM signal to the output of the RC filter formed by the network R1 and C1 generates a voltage proportional to the duty cycle which is seen by the regulator as a control signal to set the speed regulation. The isolation board allows transmitting the PWM signal generated by the Arduino board while maintaining the isolation with the MST_K07 board that operates under the electrical network while the Arduino board is connected to the PC.


_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





{kind=link}
Comments