//this is the whole code running via Processing 3.3.6. (MicroLab-Greece)
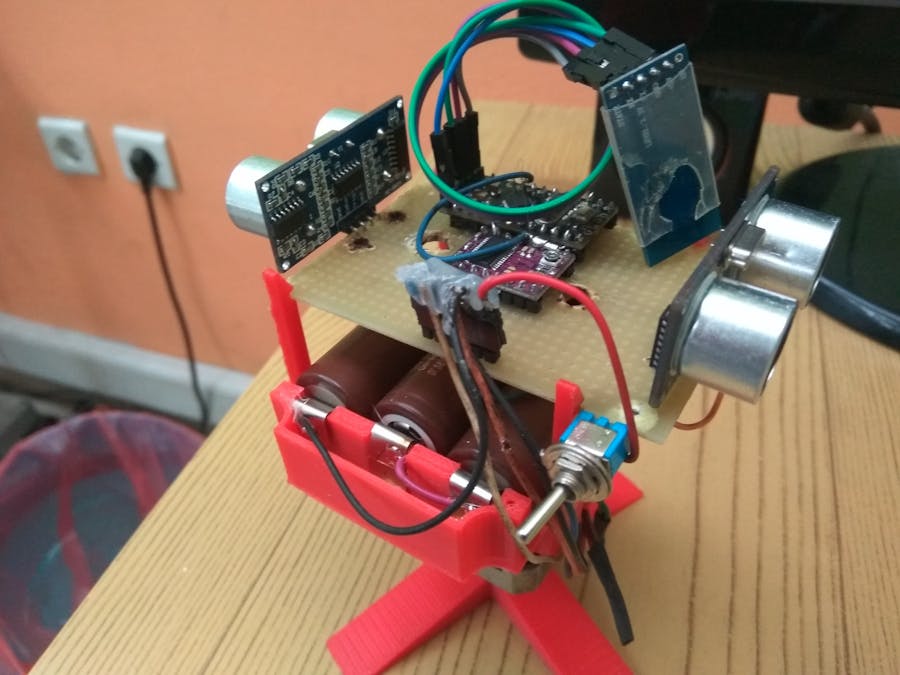
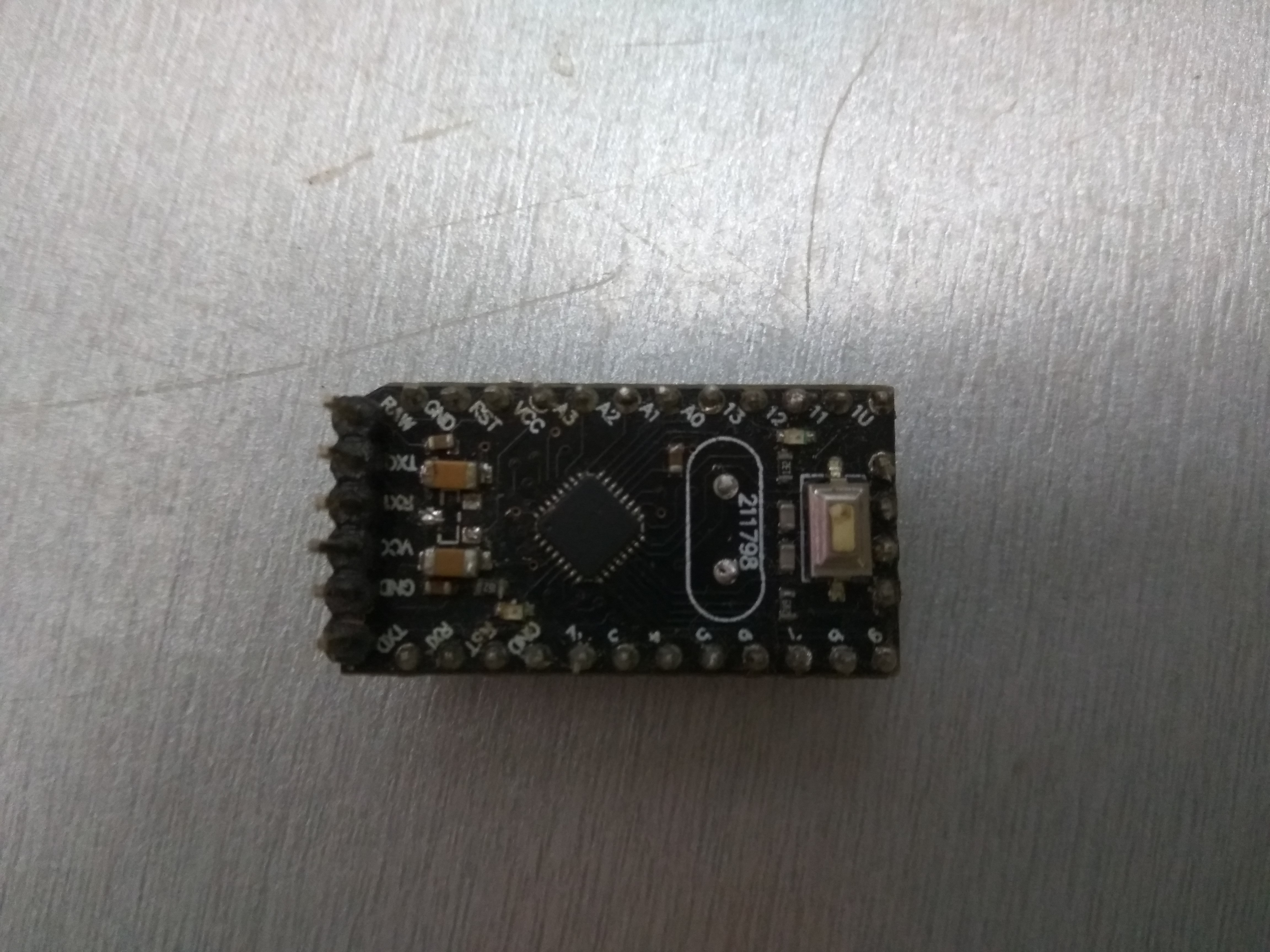
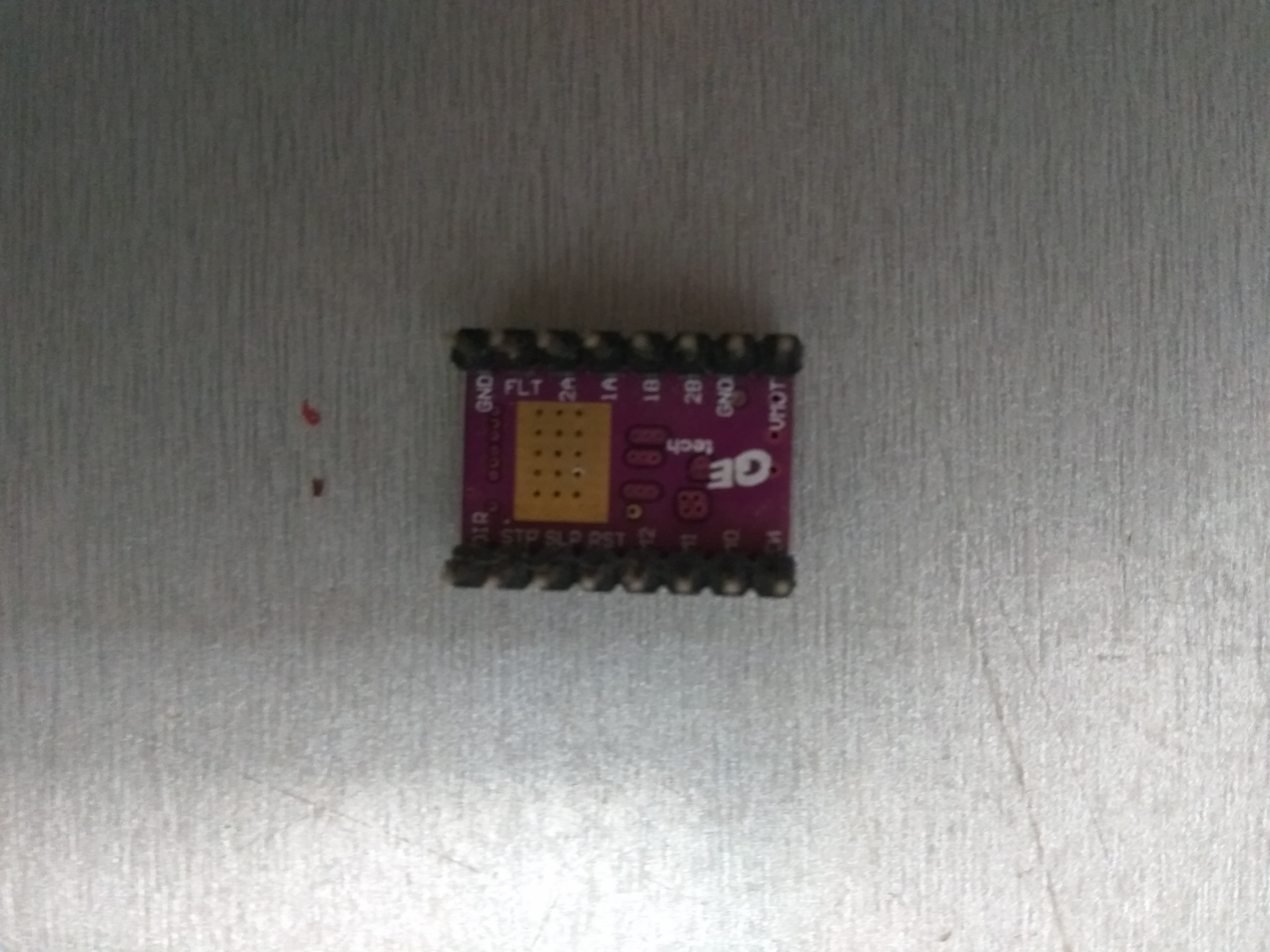
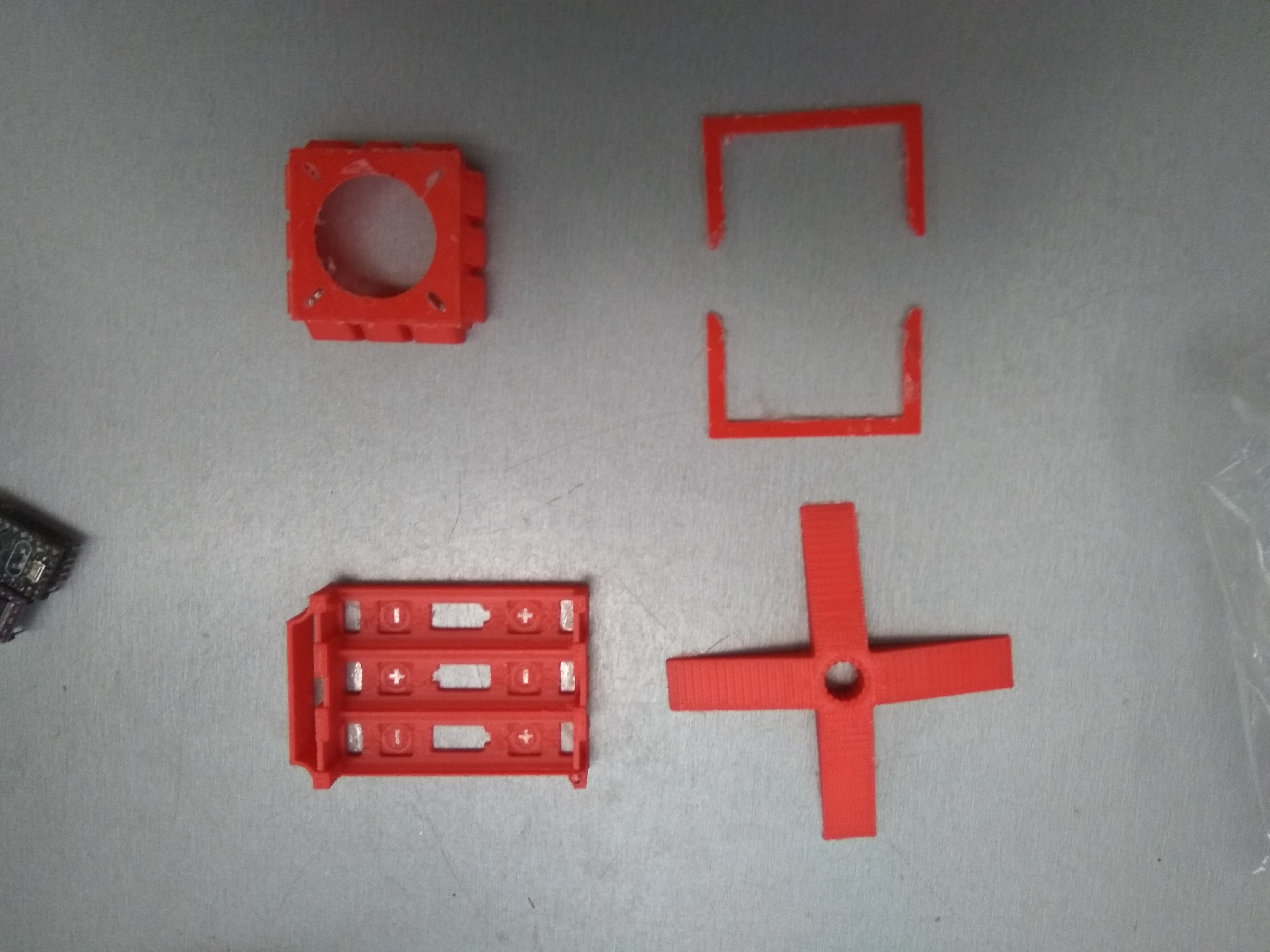
//All parts tests carried out in Arduino IDE. The plastic parts are made via 3D printer
import processing.serial.*; //import library in order serial interface data
import java.awt.event.KeyEvent; //import library for reading data from serial port
import java.io.IOException;
Serial myPort;//defines serial object
//variable definition
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (860, 860);
smooth();
myPort = new Serial(this,"COM5", 57600); //starting communication with specofic port
myPort.bufferUntil('.'); //reads data from port delimited by '.'
}
void draw() {
fill(98,245,31);
//simulation of moving line (motion and fade)
noStroke();
fill(0,4);
rect(0, 0, width, height);
fill(7,246,23);
//draws the radar calling functions
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) { //start reading data from specified port
//reads data from port delimited by (.) and assigns them in string defined variable "data"
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(","); //detect charachter ',' and assign it to the defined string variable 'index1'
angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or the value of the angle, via bluetooth, sents into the Serial Port
distance= data.substring(index1+1, data.length()); //reads the data from index() from first to last (distance)
//convert stings variables into integer
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(420,420); //moving the coordinats start
noFill();
strokeWeight(1);
stroke(255,245,255);
// draws the arc lines
arc(0,0,860,860,0,TWO_PI);
arc(0,0,720,720,0,TWO_PI);
arc(0,0,580,580,0,TWO_PI);
arc(0,0,440,440,0,TWO_PI);
arc(0,0,300,300,0,TWO_PI);
arc(0,0,160,160,0,TWO_PI);
arc(0,0,20,20,0,TWO_PI);
//darw of angle lines
line(-width/2.0,0,width/2.0,0);
line(0,0,-width*cos(radians(30)),-width*sin(radians(30)));
line(0,0,-width*cos(radians(60)),-width*sin(radians(60)));
line(0,0,-width*cos(radians(90)),-width*sin(radians(90)));
line(0,0,-width*cos(radians(120)),-width*sin(radians(120)));
line(0,0,-width*cos(radians(150)),-width*sin(radians(150)));
line(0,0,-width*cos(radians(180)),-width*sin(radians(180)));
line(0,0,-width*cos(radians(210)),-width*sin(radians(210)));
line(0,0,-width*cos(radians(240)),-width*sin(radians(240)));
line(0,0,-width*cos(radians(270)),-width*sin(radians(270)));
line(0,0,-width*cos(radians(300)),-width*sin(radians(300)));
line(0,0,-width*cos(radians(330)),-width*sin(radians(330)));
line(0,0,-width*cos(radians(360)),-width*sin(radians(360)));
line(-width*cos(radians(30)),0,width/2.0,0);
popMatrix();
}
//this function draws the detected object converting the distance into pixels on screen according the angle
void drawObject() {
pushMatrix();
translate(420,420);
strokeWeight(3);
stroke(255,10,10);
pixsDistance = iDistance*2; //converting distance from cm into pixels
//with (if) we define the limit range to 2meter (200cm) ! anyone can change the limits according to sensors specifications and drwas the line converting distance into pixel
if(iDistance<200){
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),950*cos(radians(iAngle)),-950*sin(radians(iAngle)));
}
popMatrix();
}
//this function draws the radar rotatable line
void drawLine() {
pushMatrix();
strokeWeight(6);
stroke(10,74,250);
translate(420,420);
line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle)));
popMatrix();
}
//function drawing text on screen nad its values taking from sensors
void drawText() {
pushMatrix();
fill(0,0,0);
noStroke();
rect(0, 1010, width, 600);
textSize(15);
fill(5,255,5);
translate(640,294);
rotate(-radians(-5));
text("30°",0,0);
resetMatrix();
translate(548,200);
rotate(-radians(-5));
text("60°",0,0);
resetMatrix();
translate(420,160);
rotate(radians(0));
text("90°",0,0);
resetMatrix();
translate(292,199);
rotate(radians(-30));
text("120°",0,0);
resetMatrix();
translate(202,296);
rotate(radians(-60));
text("150°",0,0);
resetMatrix();
translate(166,422);
rotate(radians(-90));
text("180°",0,0);
resetMatrix();
translate(197,550);
rotate(radians(-110));
text("210°",0,0);
resetMatrix();
translate(292,641);
rotate(radians(360));
text("240°",0,0);
resetMatrix();
translate(420,677);
rotate(radians(-360));
text("270°",0,0);
resetMatrix();
translate(544,640);
rotate(radians(-380));
text("300°",0,0);
resetMatrix();
translate(641,547);
rotate(radians(-5));
text("330°",0,0);
resetMatrix();
translate(674,422);
rotate(radians(-360));
text("360°",0,0);
resetMatrix();
translate(50,50);
rotate(radians(0));
textSize(17);
fill(255,103,1);
text("MicroLab Radar",0,0);
resetMatrix();
if(iDistance>200) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, 1010, width, 1080);
fill(26,230,32);
textSize(20);
text("Object: " + noObject, 250, 50);
text("Angle: " + iAngle +" °", 500, 50);
text("Distance: ", 650, 50);
if(iDistance<200) {
text(" " + iDistance +" cm", 750, 50);
}
popMatrix();
}
















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments