import cv2
import time
import _thread
import threading
import atexit
import sys
import termios
import contextlib
import imutils
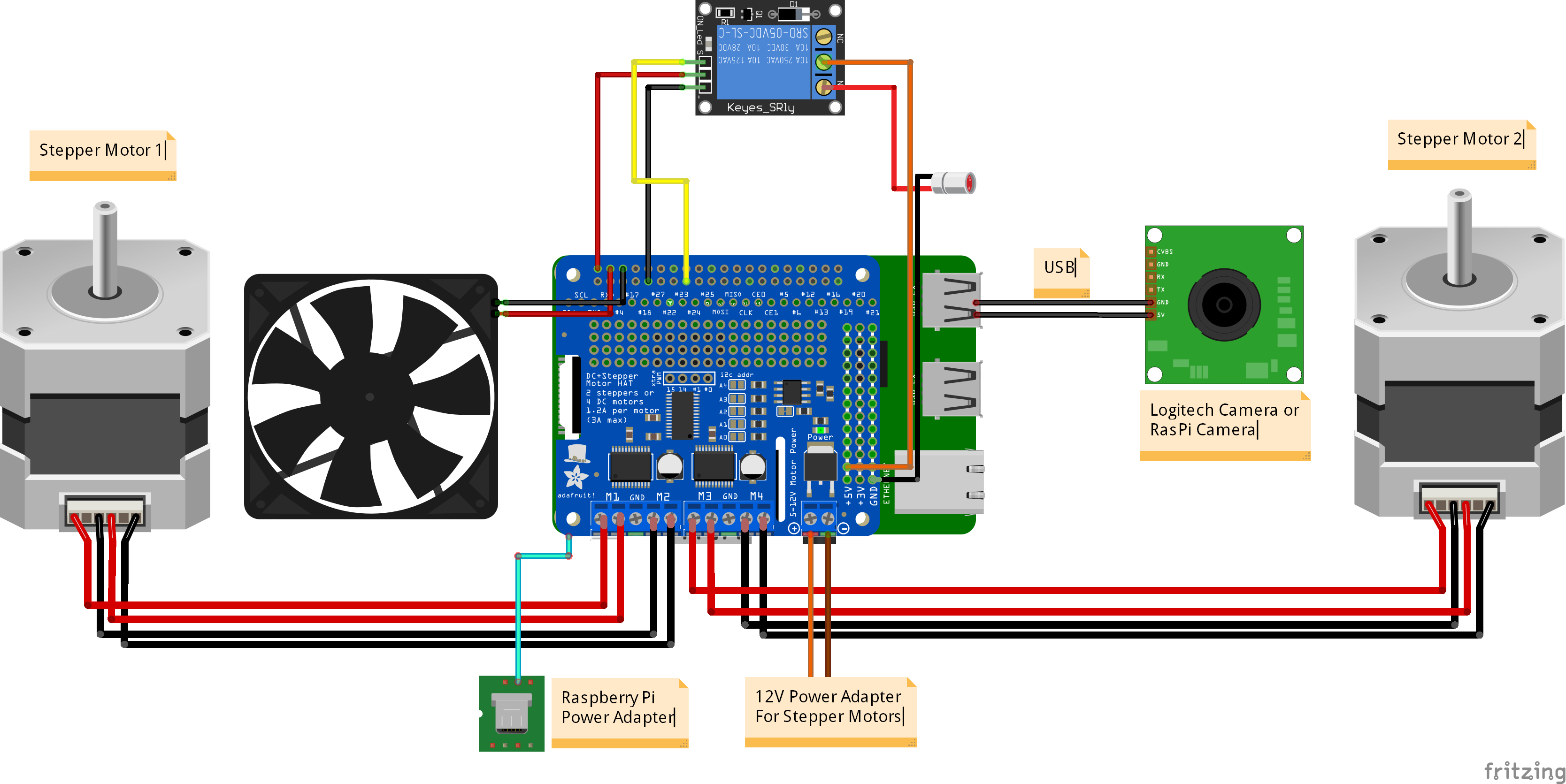
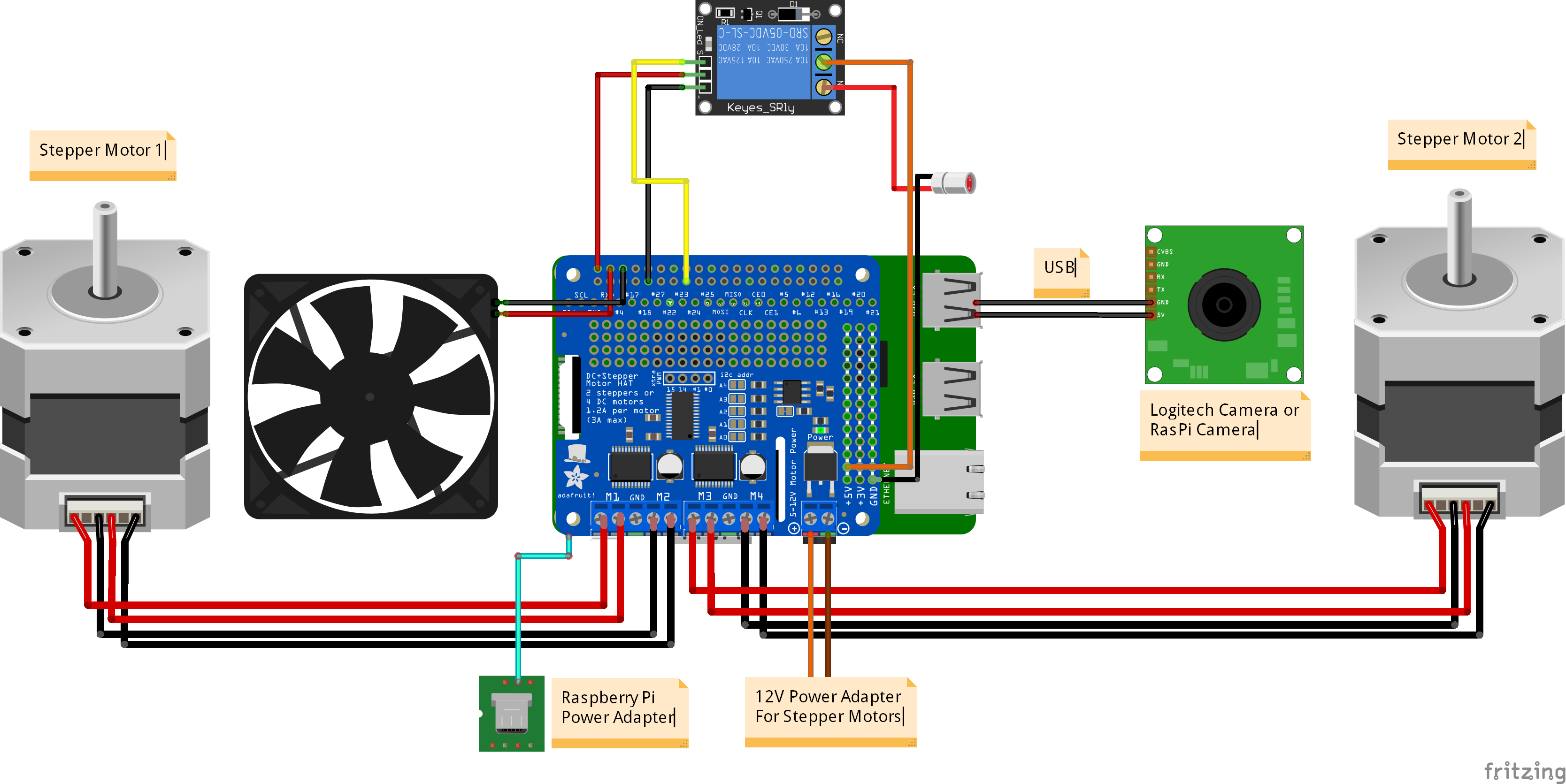
import RPi.GPIO as GPIO
from Adafruit_MotorHAT import Adafruit_MotorHAT, Adafruit_DCMotor, Adafruit_StepperMotor
### User Parameters ###
MOTOR_X_REVERSED = False
MOTOR_Y_REVERSED = False
MAX_STEPS_X = 20
MAX_STEPS_Y = 10
RELAY_PIN = 22
#######################
@contextlib.contextmanager
def raw_mode(file):
"""
Magic function that allows key presses.
:param file:
:return:
"""
old_attrs = termios.tcgetattr(file.fileno())
new_attrs = old_attrs[:]
new_attrs[3] = new_attrs[3] & ~(termios.ECHO | termios.ICANON)
try:
termios.tcsetattr(file.fileno(), termios.TCSADRAIN, new_attrs)
yield
finally:
termios.tcsetattr(file.fileno(), termios.TCSADRAIN, old_attrs)
class VideoUtils(object):
"""
Helper functions for video utilities.
"""
@staticmethod
def live_video(camera_port=0):
"""
Opens a window with live video.
:param camera:
:return:
"""
video_capture = cv2.VideoCapture(camera_port)
while True:
# Capture frame-by-frame
ret, frame = video_capture.read()
# Display the resulting frame
cv2.imshow('Video', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# When everything is done, release the capture
video_capture.release()
cv2.destroyAllWindows()
@staticmethod
def find_motion(callback, camera_port=0, show_video=False):
camera = cv2.VideoCapture(camera_port)
time.sleep(0.10)
# initialize the first frame in the video stream
firstFrame = None
tempFrame = None
count = 0
# loop over the frames of the video
while True:
# grab the current frame and initialize the occupied/unoccupied
# text
(grabbed, frame) = camera.read()
# if the frame could not be grabbed, then we have reached the end
# of the video
if not grabbed:
break
# resize the frame, convert it to grayscale, and blur it
frame = imutils.resize(frame, width=500)
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (21, 21), 0)
# if the first frame is None, initialize it
if firstFrame is None:
print ("Waiting for video to adjust...")
if tempFrame is None:
tempFrame = gray
continue
else:
delta = cv2.absdiff(tempFrame, gray)
tempFrame = gray
tst = cv2.threshold(delta, 5, 255, cv2.THRESH_BINARY)[1]
tst = cv2.dilate(tst, None, iterations=2)
if count > 30:
print ("Done.\n Waiting for motion.")
if not cv2.countNonZero(tst) > 0:
firstFrame = gray
else:
continue
else:
count += 1
continue
# compute the absolute difference between the current frame and
# first frame
frameDelta = cv2.absdiff(firstFrame, gray)
thresh = cv2.threshold(frameDelta, 25, 255, cv2.THRESH_BINARY)[1]
# dilate the thresholded image to fill in holes, then find contours
# on thresholded image
thresh = cv2.dilate(thresh, None, iterations=2)
c = VideoUtils.get_best_contour(thresh.copy(), 5000)
if c is not None:
# compute the bounding box for the contour, draw it on the frame,
# and update the text
(x, y, w, h) = cv2.boundingRect(c)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
callback(c, frame)
# show the frame and record if the user presses a key
if show_video:
cv2.imshow("Security Feed", frame)
key = cv2.waitKey(1) & 0xFF
# if the `q` key is pressed, break from the lop
if key == ord("q"):
break
# cleanup the camera and close any open windows
camera.release()
cv2.destroyAllWindows()
@staticmethod
def get_best_contour(imgmask, threshold):
im, contours, hierarchy = cv2.findContours(imgmask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
best_area = threshold
best_cnt = None
for cnt in contours:
area = cv2.contourArea(cnt)
if area > best_area:
best_area = area
best_cnt = cnt
return best_cnt
class Mertracking(object):
"""
Class used for Mertracking control.
"""
def __init__(self, friendly_mode=True):
self.friendly_mode = friendly_mode
# changes to I2C address or frequency
self.mh = Adafruit_MotorHAT(0x6f)
atexit.register(self.__turn_off_motors)
# Stepper motor 1
self.sm_x = self.mh.getStepper(200, 1) # 200 steps/rev, motor port #1
self.sm_x.setSpeed(5) # 5 RPM
self.current_x_steps = 0
# Stepper motor 2
self.sm_y = self.mh.getStepper(200, 2) # 200 steps/rev, motor port #2
self.sm_y.setSpeed(5) # 5 RPM
self.current_y_steps = 0
# Relay
GPIO.setmode(GPIO.BCM)
GPIO.setup(RELAY_PIN, GPIO.OUT)
GPIO.output(RELAY_PIN, GPIO.LOW)
def calibrate(self):
"""
Waits for input to calibrate the Mertracking's axis
:return:
"""
print ("Please calibrate the tilt of the gun so that it is level. Commands: (w) moves up, " \
"(s) moves down. Press (enter) to finish.\n")
self.__calibrate_y_axis()
print ("Please calibrate the yaw of the gun so that it aligns with the camera. Commands: (a) moves left, " \
"(d) moves right. Press (enter) to finish.\n")
self.__calibrate_x_axis()
print ("Calibration finished.")
def __calibrate_x_axis(self):
"""
Waits for input to calibrate the x axis
:return:
"""
with raw_mode(sys.stdin):
try:
while True:
ch = sys.stdin.read(1)
if not ch:
break
elif ch == "a":
if MOTOR_X_REVERSED:
Mertracking.move_backward(self.sm_x, 5)
else:
Mertracking.move_forward(self.sm_x, 5)
elif ch == "d":
if MOTOR_X_REVERSED:
Mertracking.move_forward(self.sm_x, 5)
else:
Mertracking.move_backward(self.sm_x, 5)
elif ch == "\n":
break
except (KeyboardInterrupt, EOFError):
print ("Error: Unable to calibrate Mertracking. Exiting...")
sys.exit(1)
def __calibrate_y_axis(self):
"""
Waits for input to calibrate the y axis.
:return:
"""
with raw_mode(sys.stdin):
try:
while True:
ch = sys.stdin.read(1)
if not ch:
break
if ch == "w":
if MOTOR_Y_REVERSED:
Mertracking.move_forward(self.sm_y, 5)
else:
Mertracking.move_backward(self.sm_y, 5)
elif ch == "s":
if MOTOR_Y_REVERSED:
Mertracking.move_backward(self.sm_y, 5)
else:
Mertracking.move_forward(self.sm_y, 5)
elif ch == "\n":
break
except (KeyboardInterrupt, EOFError):
print ("Error: Unable to calibrate Mertracking. Exiting...")
sys.exit(1)
def motion_detection(self, show_video=False):
"""
Uses the camera to move the Mertracking. OpenCV ust be configured to use this.
:return:
"""
VideoUtils.find_motion(self.__move_axis, show_video=show_video)
def __move_axis(self, contour, frame):
(v_h, v_w) = frame.shape[:2]
(x, y, w, h) = cv2.boundingRect(contour)
# find height
target_steps_x = (2*MAX_STEPS_X * (x + w / 2) / v_w) - MAX_STEPS_X
target_steps_y = (2*MAX_STEPS_Y*(y+h/2) / v_h) - MAX_STEPS_Y
print ("x: %s, y: %s" % (str(target_steps_x), str(target_steps_y)))
print ("current x: %s, current y: %s" % (str(self.current_x_steps), str(self.current_y_steps)))
t_x = threading.Thread()
t_y = threading.Thread()
t_fire = threading.Thread()
# move x
if (target_steps_x - self.current_x_steps) > 0:
self.current_x_steps += 1
if MOTOR_X_REVERSED:
t_x = threading.Thread(target=Mertracking.move_forward, args=(self.sm_x, 2,))
else:
t_x = threading.Thread(target=Mertracking.move_backward, args=(self.sm_x, 2,))
elif (target_steps_x - self.current_x_steps) < 0:
self.current_x_steps -= 1
if MOTOR_X_REVERSED:
t_x = threading.Thread(target=Mertracking.move_backward, args=(self.sm_x, 2,))
else:
t_x = threading.Thread(target=Mertracking.move_forward, args=(self.sm_x, 2,))
# move y
if (target_steps_y - self.current_y_steps) > 0:
self.current_y_steps += 1
if MOTOR_Y_REVERSED:
t_y = threading.Thread(target=Mertracking.move_backward, args=(self.sm_y, 2,))
else:
t_y = threading.Thread(target=Mertracking.move_forward, args=(self.sm_y, 2,))
elif (target_steps_y - self.current_y_steps) < 0:
self.current_y_steps -= 1
if MOTOR_Y_REVERSED:
t_y = threading.Thread(target=Mertracking.move_forward, args=(self.sm_y, 2,))
else:
t_y = threading.Thread(target=Mertracking.move_backward, args=(self.sm_y, 2,))
# fire if necessary
if not self.friendly_mode:
if abs(target_steps_y - self.current_y_steps) <= 2 and abs(target_steps_x - self.current_x_steps) <= 2:
t_fire = threading.Thread(target=Mertracking.fire)
t_x.start()
t_y.start()
t_fire.start()
t_x.join()
t_y.join()
t_fire.join()
def interactive(self):
"""
Starts an interactive session. Key presses determine movement.
:return:
"""
Mertracking.move_forward(self.sm_x, 1)
Mertracking.move_forward(self.sm_y, 1)
print ('Commands: Pivot with (a) and (d). Tilt with (w) and (s). Exit with (q)\n')
with raw_mode(sys.stdin):
try:
while True:
ch = sys.stdin.read(1)
if not ch or ch == "q":
break
if ch == "w":
if MOTOR_Y_REVERSED:
Mertracking.move_forward(self.sm_y, 5)
else:
Mertracking.move_backward(self.sm_y, 5)
elif ch == "s":
if MOTOR_Y_REVERSED:
Mertracking.move_backward(self.sm_y, 5)
else:
Mertracking.move_forward(self.sm_y, 5)
elif ch == "a":
if MOTOR_X_REVERSED:
Mertracking.move_backward(self.sm_x, 5)
else:
Mertracking.move_forward(self.sm_x, 5)
elif ch == "d":
if MOTOR_X_REVERSED:
Mertracking.move_forward(self.sm_x, 5)
else:
Mertracking.move_backward(self.sm_x, 5)
elif ch == "\n":
Mertracking.fire()
except (KeyboardInterrupt, EOFError):
pass
@staticmethod
def fire():
GPIO.output(RELAY_PIN, GPIO.HIGH)
time.sleep(1)
GPIO.output(RELAY_PIN, GPIO.LOW)
@staticmethod
def move_forward(motor, steps):
"""
Moves the stepper motor forward the specified number of steps.
:param motor:
:param steps:
:return:
"""
motor.step(steps, Adafruit_MotorHAT.FORWARD, Adafruit_MotorHAT.MICROSTEP)
@staticmethod
def move_backward(motor, steps):
"""
Moves the stepper motor backward the specified number of steps
:param motor:
:param steps:
:return:
"""
motor.step(steps, Adafruit_MotorHAT.BACKWARD, Adafruit_MotorHAT.MICROSTEP)
def __turn_off_motors(self):
"""
Recommended for auto-disabling motors on shutdown!
:return:
"""
self.mh.getMotor(1).run(Adafruit_MotorHAT.RELEASE)
self.mh.getMotor(2).run(Adafruit_MotorHAT.RELEASE)
self.mh.getMotor(3).run(Adafruit_MotorHAT.RELEASE)
self.mh.getMotor(4).run(Adafruit_MotorHAT.RELEASE)
if __name__ == "__main__":
t = Mertracking(friendly_mode=False)
user_input = input("(YouTube/Mert Arduino - Subscribe for Support)\nChoose an input mode: (1) Motion Detection, (2) Interactive\n")
if user_input == "1":
t.calibrate()
if input("Live video? (y, n)\n").lower() == "y":
t.motion_detection(show_video=True)
else:
t.motion_detection()
elif user_input == "2":
if input("Live video? (y, n)\n").lower() == "y":
_thread.start_new_thread(VideoUtils.live_video, ())
t.interactive()
else:
print ("Unknown input mode. Please choose a number (1) or (2)")













{kind=link}
Comments