/* ******************************************************************************************************************
* ******************************************************************************************************************
* KEVIN 4.0
* The automated Christmas Jelly Bag Cap
* Version 1.0
* Dec. 2018
* ******************************************************************************************************************
* ******************************************************************************************************************
* Hardware:
* 1x Electrical Christmas Jelly Bag Cap. Bought somewhere on a street Christmas market.
* Please search for "Dancing Christmas Hat"
* https://www.alibaba.com/product-detail/Christmas-Gifts-Funny-Plush-Christmas-Electronic_60823418260.html?spm=a2700.7724857.normalList.31.29245b42qCqfeN
* There are many similar devices available in the web. They seemingly work according to the same control unit or in a very similar way.
*
* 1x ESP8266 D1 Mini Wemos compatible
* 1x Adafruit DRV8833 DC/Stepper Motor Driver Breakout Board
*
* 1x Breakout Board for Electret Microphone (Adafruit)
* https://electronics.semaf.at/Breakout-Board-for-Electret-Microphone
*
* 1x Temperature sensor: One Wire Digital Temperature Sensor - DS18B20
* https://electronics.semaf.at/One-Wire-Digital-Temperature-Sensor-DS18B20
*
* 1x LED strip (bought in DYI market for 1 EUR. Any similar product is fine.
* 1x USB Power Bank (as power supply)
* 1x PCB Board - I used the Adafruit Perma-Proto Half-sized Breadboard
* https://www.adafruit.com/product/571
*
* 2x 4-pin cable connector. I used this one: 4-pin JST SM Plug - Receptacle Cable Set. Any similar is fine as well
* https://electronics.semaf.at/4-pin-JST-SM-Plug-Receptacle-Cable-Set
*
* Cables, wires, simple push button, plastic box, soldering iron
* Several good glasses of wine.
* ******************************************************************************************************************
* ******************************************************************************************************************
* The project adds interactivity to a motorized Dancing Christmas Hat. I was bored by the ever same melody and rhythm
* of the tail of the hat. My idea was to make it more live.
* At the end the hat can be operated in several modes:
*
* METRONOME MODE:
* Here the tail swings in a specific frequency (beats per minute BPM). It is useful for playing music with it. The software features a setlist of
* music tunes of a concert and the respective BPM
*
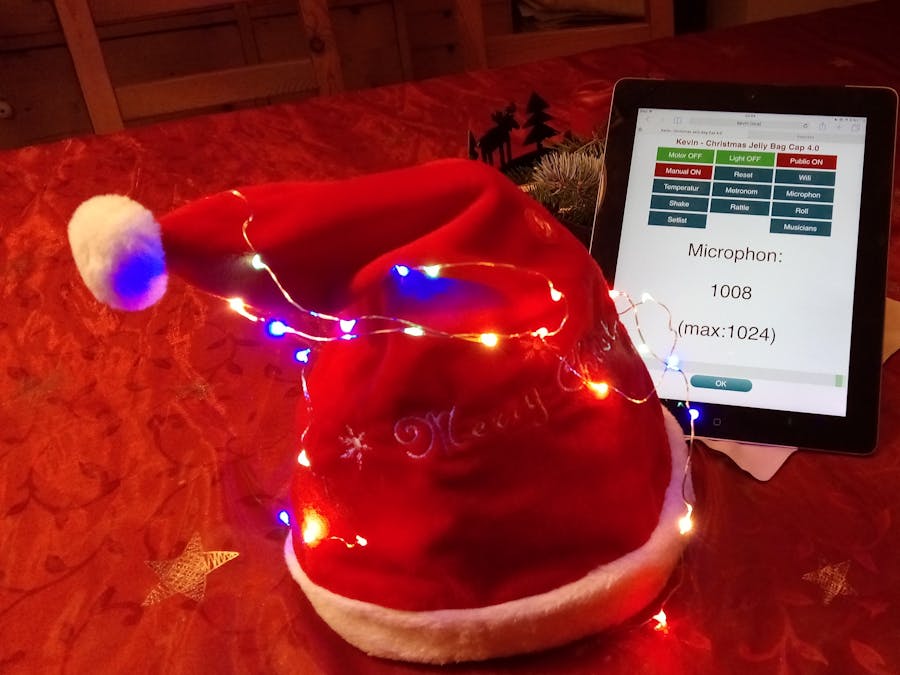
* MICROPHONE MODE:
* The tail swings, if the sound level recorded by the microphone exceeds a certain level. Funny to remote control it with handclapping or applause
*.
* MANUAL:
* Commands given via a webpage and wifi connection or by pushing a button on the control device
*
* TEMPERATURE MODE:
* A temperature sensor records the ambient temperature. The hat will swing faster if it becomes hotter. In temperature mode, client websites reload automatically every minute.
* This feature is driven by Javascript of the HTML header.
*
* ADMIN/CLIENT
* The software detects an "admin" via a dedicated IP address. This admin has full rights and features a more detailed control panel on the website.
* The admin can turn on and off the public interaction. If turned off, "clients" can only see the temperature and read the list of musicians
* If turned on, "clients" can remotely trigger actions of the hat: simple swing, rattling and combination thereof. Feel free to add other interactions!
* The reason for turining on and off were in the use case during a concert. I didn't like all time remote pushes. Also of course the server of the ESP8266 is not
* prepared for high loads and timing will suffer a lot if many "clients" are sending HTML requests.
*
*
* ******************************************************************************************************************
* ******************************************************************************************************************
* Comments:
*
* The code has been written by Max Paul
* I consider myself to be a more or less inexperienced programmer
* in particular concerning embedded software.
* Many code snipplets and demo programs have been used. I cordially thank all
* providers of these libraries and software parts. No IP is claimed by myself for
* all of such components.
* The software also contains lots of remainders of trial and error attempts to include other
* sensors or other versions. Also, some functions did not reach the goal, but remained in semi-finished
* status in the program. More time would have been necessary to clean up and stramline
* naming conventions, etc.
* Furthermore, the code is not written in efficient way and does not save resources on the target HW.
* As such, please do not blaim me - even not for obvious errors or neglicence. I am open
* for all improvement suggestions. At the end I was glad to finish the project in due time.
* The cap was used in a Christmas concert and hence provided further functionality concerning this
* use-case (display of a setlist of the evening program and list of musicians on the remote devices)
* Maybe there are still some German words in the code, please feel free to translate...
*
* Thanks for your understanding, Merry Christmas and greetings from Vienna!
* max.paul@cardeas.at
*
* ******************************************************************************************************************
* ******************************************************************************************************************
*
* Breadboard wiring scheme
Push button: GND / D
Thermosensor: left: GND - Center: D3 Right: +3.3V D3 - +3.3: 4.7k Resistor
Mirophone: GND/3.3 Signal: A0
*
* DRV8833:
* Motor:
* AIN1 - D1 of 8266
* AIN2 - D2 of 8266
* AOUT1 - Motor
* AOUT2 - Motor
*
* LED Strip:
* BIN1 - D6 of 8266
* BIN2 - D5 of 8266
* BOUT1 - LED Strip
* BOUT2 - LED Strip
*
* VMotor
* +/- 4.5 V from external battery
*
* AS - GND
* SLP - 3.3V
*
* ESP8266:
* A0 - Microphone Audio
* D1 - AIN1 of 8833
* D2 - AIN2 of 8833
* D3 - Data of Thermo sensor, 4,7k Resistor to +3.3V
* D5 - BIN2 of 8833
* D6 - BIN1 of 8833
* D7 - Push button to GND
*
*
* Motor: D1/D2 - AIN1/2 D1 - AIN1, D2 AIN2
LED Strip: D5/D6 - BIN1/2 D5 - BIN2, D6-BIN1
SLP-+3.3V
GND-AS
AOUT1-Blue
AOUT2-Brown
+ gGelb
GND Black
8266: 3V3+ - 3.3 Rail
G - GND
D-Sub connector pins
1 Thermo green
2 Audio blue
3 BOUT 1 pink
4 BOUT 2 grey
5 Taster - D7 brown/blue
6 +3.3 red/white
7 GND black/grey
8 GND 2 black/grey
9 +3.3 2 red/white
*/
// Several compiler switches
// _DEBUG_ will create lot of serial output for debugging purpose
// _SOFT_AP_ operates the ESP8266 in Access Point mode. In this mode, less functionality is possible, but you won't need a separate router
// _LED_MOTOR_ is useful for debugging and programming without the tail hardware present. In this mode, motor movement is indicated as flickering LED
//#define _DEBUG_
//#define _SOFT_AP_
//#define _LED_MOTOR_
// Load Wi-Fi library
#include <ESP8266WiFi.h>
#include <ESP8266WebServer.h>
#include <WiFiClient.h>
#include <OneWire.h>
#include <DallasTemperature.h>
#include <ESP8266mDNS.h>
extern "C" {
#include<user_interface.h>
}
// Definitions for motor control output pins
#define MotorOutPin1 D1 // GPIO 5
#define MotorOutPin2 D2 // GPIO 4
#define LightOutPin1 D5 // Used for LED light chain
#define LightOutPin2 D6 // Used for LED light chain
// Definitions for motor movement and tail position
#define RIGHT 1
#define LEFT 2
#define CENTER 3
#define FAST 50 // the smaller the number = the stronger the motor. 100 would be a good value without the cap
#define SLOW 800
#define RASPY 1 // Initial intention was to have different modes of motor movement. In reality, there was hardly a difference between rasp and gentle mode
#define GENTLY 2
#define SHAKE_DELAY 500 // Wait 500ms between shakes
#define MOTORCOMPENSATION 20 // Compensation for harder resistance in one direction of move. It is additional motor running time
int giMotorDirection = RIGHT; // Initial motor direction will be rightwise
int giMotorRuntime = 240; // 130 would be a good value without the cap
const int ciRattles = 20; // Number of rattles
int giWingPosition = 0; // Indicates the position of the wing/tail. Initially undefined
// Definitions for temperature sensor
#define ONE_WIRE_BUS D3 //Pin to which is attached a temperature sensor
#define ONE_WIRE_MAX_DEV 1 //The maximum number of devices
OneWire oneWire(ONE_WIRE_BUS);
DallasTemperature DS18B20(&oneWire);
int giNumberOfTempSensors; //Number of temperature devices found
DeviceAddress devAddr[ONE_WIRE_MAX_DEV]; //An array device temperature sensors
float tempDev[ONE_WIRE_MAX_DEV]; //Saving the last measurement of temperature
float tempDevLast[ONE_WIRE_MAX_DEV]; //Previous temperature measurement
long lastTemp; //The last measurement
// Definitions for microphone
const int sampleWindow = 100; // Sample window width in mS (250 mS = 4Hz)
unsigned int gKnock; // Variable to store recorded sound level
int giMaxPeak = 816; // Initial sensitivity level, has to be adjusted according to experience and trial
// Definitions for program and button state machine
#define LED_HIGH LOW
#define LED_LOW HIGH
#define MOTOR_STATE_ON 1
#define MOTOR_STATE_OFF 0
#define LIGHT_STATE_ON 1
#define LIGHT_STATE_OFF 0
#define WIFI_STATE_CONNECTED 1
#define WIFI_STATE_NOT_CONNECTED 0
#define PUBLIC_STATE_ON 1
#define PUBLIC_STATE_OFF 0
#define STATE_START 1
#define STATE_METRONOME 2
#define STATE_MICROPHONE 3
#define STATE_TEMPERATURE 4
#define STATE_OTHER 5
int giMotorState = MOTOR_STATE_OFF; // Initially the tail movement shall be switched off
int giLightState = LIGHT_STATE_OFF; // Initially light shall be switched off
int giWifiState = WIFI_STATE_NOT_CONNECTED; // State will be changed after successfull connection
int giPublicState = PUBLIC_STATE_OFF; // Initially other clients shall not be able to control the tail
int giLight = LIGHT_STATE_OFF; // Light is off
int giState = STATE_START; // Program state machine in initial mode
// Shortcuts to switch internal LED and lights
#define LEDON digitalWrite(LED_BUILTIN, LED_HIGH);
#define LEDOFF digitalWrite(LED_BUILTIN, LED_LOW);
#define LIGHTON digitalWrite(LightOutPin1, LOW); \
digitalWrite(LightOutPin2, HIGH);\
giLight = LIGHT_STATE_ON;
#define LIGHTOFF digitalWrite(LightOutPin1, LOW); \
digitalWrite(LightOutPin2, LOW); \
giLight = LIGHT_STATE_OFF;
// Definitions for Wifi to log on
#ifdef _SOFT_AP_
const char* ssid = "KVN40";
const char* password = "kevin";
const char* adminIP = "192.168.4.2"; // Special IP address reserved for admin client in soft AP mode. Normally the first device to connect to the AP
#else
const char* ssid = "KVN40";
const char* password = "kevin";
const char* adminIP = "192.168.0.3"; // Special IP address reserved for admin client. This address has to be statically assigned at the router to the admin device.
#endif
int giAdminConnected = false; // Variable to indicate, if admin client is present. Admin client is identified through statically assigned IP address adminIP
// Set web server port number to 80
ESP8266WebServer gESPServer(80);
// CSS style sheet
#define CSS_HDR_1 "<style>"
#define CSS_HDR_2 "html { font-family: Helvetica; display: inline-block; margin: 0px auto; text-align: center;}"
#define CSS_HDR_3 " .button { background-color: #195B6A; border: none; color: white; padding: 16px 40px; text-decoration: none; font-size: 30px; margin: 2px; cursor: pointer; width: 250px;}"
#define CSS_HDR_4 " .button2 {background-color: #669900;} .buttonred {background-color: #990000;} .buttongreen {background-color: #009900;} .button3 {width: 250px; height: 200px; font-size: 42px;} .buttonadmin {width: 250px;} .pagetitle { border: none; color: #8B0000; padding: 16px 40px; text-decoration: none; font-size: 40px; margin: 10px;}"
#define CSS_HDR_5 " .textarea, h1 { color: #8B0000; text-decoration: none; font-size: 36px; margin: 3px;}"
#define CSS_HDR_6 " .slidecontainer {font-size: 80px; width: 100%; margin: 25px 0px; padding-bottom: 20px; }"
#define CSS_HDR_7 " .slider {-webkit-appearance: none; width: 100%; height: 50px; background: #d3d3d3; outline: none; opacity: 0.7; -webkit-transition: .2s; transition: opacity .2s;} .slider:hover {opacity: 1;} .slider::-webkit-slider-thumb { -webkit-appearance: none; appearance: none; width: 25px; height: 50px; background: #4CAF50; cursor: pointer;} .slider::-moz-range-thumb {width: 25px; height: 50px; background: #4CAF50; cursor: pointer;}"
#define CSS_HDR_8 "</style>"
#define CSS_HDR CSS_HDR_1 \
CSS_HDR_2 \
CSS_HDR_3 \
CSS_HDR_4 \
CSS_HDR_5 \
CSS_HDR_6 \
CSS_HDR_7 \
CSS_HDR_8
// HTML Website header including Javascript functions
// Since the device was used during a live bigband concert there is functionality present to display the evening program and the list of musicians. Such code can be erased if not desired.
#define HTML_HEAD_NO_REFRESH \
"<html>" \
"<head>" \
"<meta http-equiv=\"content-type\" content=\"text/html; charset=utf-8\">" \
"<title class=\"pagetitle\">" \
APP_TITLE \
"</title>" \
CSS_HDR \
"<script>" \
"var eveningprogram = [];" \
"var musicians = [];" \
"var toTimeout;" \
"var strListe = \"\";" \
"var strSetList = \"\";" \
"var iCurrentTitle = 10;" \
"eveningprogram.push({song:\"Japan\", BPM:160}," \
"{song:\"Bewitched\", BPM:160}," \
"{song:\"You are the sunshine\", BPM:128}," \
"{song:\"That's life\", BPM:76 }," \
"{song:\"New York, New York\", BPM:112}," \
"{song:\"When you wish\", BPM:120}," \
"{song:\"Die Liste\", BPM:160}," \
"{song:\"Beauty and the beast\", BPM:66 }," \
"{song:\"Feliz navidad\", BPM:160}," \
"{song:\"Pause\", BPM:0 }," \
"{song:\"Baby, its cold outside\", BPM:104}," \
"{song:\"Go, tell it on the mountain\", BPM:124}," \
"{song:\"A child is born\", BPM:68 }," \
"{song:\"Winter Wonderland\", BPM:110}," \
"{song:\"Have yourself\", BPM:72 }," \
"{song:\"I'll be home for Christmas\", BPM:72 }," \
"{song:\"Let it snow\", BPM:110}," \
"{song:\"Have yourself\", BPM:104}," \
"{song:\"The Christmas song\", BPM:72 }," \
"{song:\"Santa Claus is coming\", BPM:144}," \
"{song:\"White Christmas\", BPM:76 }," \
"{song:\"All I want for Christmas\", BPM:160});" \
"musicians.push( {instrument:\"Altsax 1:\", name:\"Name 1\"}," \
"{instrument:\"Altsax 2:\", name:\"Name 2\"}," \
"{instrument:\"Tenorsax 1:\", name:\"Name 3\"}," \
"{instrument:\"Tenorsax 2:\", name:\"Name 4\"}," \
"{instrument:\"Baritonsax:\", name:\"Name 5\"}," \
"{instrument:\"\", name:\"\"}," \
"{instrument:\"Trompete 1:\", name:\"Name 6\"}," \
"{instrument:\"Trompete 2:\", name:\"Name 7\"}," \
"{instrument:\"Trompete 3:\", name:\"Name 8\"}," \
"{instrument:\"Trompete 4:\", name:\"Name 9\"}," \
"{instrument:\"\", name:\"\"}," \
"{instrument:\"Posaune 1:\", name:\"Name 10\"}," \
"{instrument:\"Posaune 2:\", name:\"Name 11\"}," \
"{instrument:\"Posaune 3:\", name:\"Name 12\"}," \
"{instrument:\"\", name:\"\"}," \
"{instrument:\"Gitarre:\", name:\"Name 13\"}," \
"{instrument:\"Bass:\", name:\"Name 14\"}," \
"{instrument:\"Drums:\", name:\"Name 15\"}," \
"{instrument:\"Klavier:\", name:\"Name 16\"}," \
"{instrument:\"\", name:\"\"}," \
"{instrument:\"Vocal:\", name:\"Name 17\"}," \
"{instrument:\"Vocal:\", name:\"Name 18\"}," \
"{instrument:\"\", name:\"\"}," \
"{instrument:\"Bandleader:\", name:\"Name 19\"});" \
"function fnPreviousTitle() {" \
"if (iCurrentTitle>0) iCurrentTitle--;" \
"document.getElementById(\"CurrentTitle\").innerHTML = eveningprogram[iCurrentTitle].song;" \
"document.getElementById(\"CurrentBPM\").innerHTML = eveningprogram[iCurrentTitle].BPM;" \
"document.getElementById(\"SongBPM\").innerHTML = eveningprogram[iCurrentTitle].BPM;" \
"document.getElementById(\"inputMetronom\").value = eveningprogram[iCurrentTitle].BPM;" \
"}" \
"function fnNextTitle() {" \
"if (iCurrentTitle<eveningprogram.length-1) iCurrentTitle++;" \
"document.getElementById(\"CurrentTitle\").innerHTML = eveningprogram[iCurrentTitle].song;" \
"document.getElementById(\"CurrentBPM\").innerHTML = eveningprogram[iCurrentTitle].BPM;" \
"document.getElementById(\"inputMetronom\").value = eveningprogram[iCurrentTitle].BPM;" \
"}" \
"function fnUpdateBPM(val) {" \
"document.getElementById(\"CurrentBPM\").innerHTML = val;" \
"}" \
"function fnUpdateMicro(val) {" \
"document.getElementById(\"CurrentMIC\").innerHTML = val;" \
"}" \
"musicians.forEach(fnConcatMusicianList);" \
"function fnConcatMusicianList(value) {" \
"strListe = strListe + value.instrument + \" \" + value.name + \"<br>\"; " \
"}" \
"eveningprogram.forEach(fnConcatSetList);" \
"function fnConcatSetList(value) {" \
"strSetList = strSetList + value.song + \"<br>\"; " \
"}" \
"function fnTogglemusicians() {" \
"clearTimeout(toTimeout);" \
"if (document.getElementById(\"Textarea\").style.display === \"block\") {" \
"document.getElementById(\"Textarea\").style.display = \"none\";" \
"}" \
"else {" \
"document.getElementById(\"Textarea\").innerHTML = strListe;" \
"document.getElementById(\"Textarea\").style.display = \"block\";" \
"}" \
"}" \
"function fnToggleSetList() {" \
"clearTimeout(toTimeout);" \
"if (document.getElementById(\"Textarea\").style.display === \"block\") {" \
"document.getElementById(\"Textarea\").style.display = \"none\";" \
"}" \
"else {" \
"document.getElementById(\"Textarea\").innerHTML = strSetList;" \
"document.getElementById(\"Textarea\").style.display = \"block\";" \
"}" \
"}" \
"function fnSetTimeout() {" \
"toTimeout = setTimeout(fnReloadPage, 60000);" \
"}" \
"function fnReloadPage(){" \
"location.reload(true);" \
"}"\
"</script>" \
"</head>"
// Response status of HTTP request
#define HTTP_STATUS_OK 200
#define HTTP_STATUS_ACCEPTED 202
#define HTTP_STATUS_NO_CONTENT 204
#define HTTP_STATUS_NOT_FOUND 404
#define APP_TITLE "Kevin - Christmas Jelly Bag Cap 4.0"
#define SVR_ARG_BPM "rangeBPM"
#define SVR_ARG_MAXRANGE "sensitivity"
// Definitions for Metronome Mode
#define UPDATE_BPM 10000
int giInterval = 1000; // 1000 = 1sec = 60BPM
int giBPM = 90; // 90BPM
int giUpdateBPM = UPDATE_BPM; // 10000 = 10sec
// PushButton
// On the device there is a single push button. It can be operated in two modes: In the MENU mode it switches between the program state machine modes:
// STATE_START (1), STATE_METRONOME (2), STATE_MICROPHONE (3), STATE_TEMPERATURE (4), STATE_OTHER (5)
// If pushed for longer time (MULTIPUSH_INTERVAL), it toggles to a "MANUAL mode" and vice versa.
// In this mode it will trigger tail swings and other movements as it is defined in the main loop "Manual 1", etc.
// The push button engine features an anto-bouncing evaluation.
#define STATE_BUTTON_MENU 1 // Button state machine: In menu mode, button selects program state machine
#define STATE_BUTTON_MANUAL_MODE 2 // in manual mode, commands are immediately performed after button was pressed
#define PUSHBUTTONPIN D7 // GPIO 13
#define BOUNCE_INTERVAL 200 // 200 milliseconds
#define MULTIPUSH_INTERVAL 2000 // 2 seconds time to push several times
#define MAX_PUSHINTERRUPTS 50 // Count 50 pushes (incl. bounces)
volatile long glPushInterrupts[MAX_PUSHINTERRUPTS]; // Array to store the pushes
volatile int giPushInterrupts = 0; // Total pushes (incl. bounces)
int giNumberOfPushButtonPressed = 0; // Total real pushes
int giButtonState = STATE_BUTTON_MENU;
//---------------------------------------------------------------------------------
//-------------------------------------- Code Begin -------------------------------
//---------------------------------------------------------------------------------
#ifdef _DEBUG_
//Convert device id to String - used only to print out address of temperature sensor
String GetAddressToString(DeviceAddress deviceAddress) {
String str = "";
for (uint8_t i = 0; i < 8; i++) {
if ( deviceAddress[i] < 16 ) str += String(0, HEX);
str += String(deviceAddress[i], HEX);
}
return str;
}
#endif
// Performs an entire swing
void TailSwing(int iMode, int iSpeed) {
int iMotorRun;
switch (iSpeed) {
case SLOW:
iMotorRun = giMotorRuntime * 0.6;
break;
case FAST:
iMotorRun = giMotorRuntime;
break;
default:
iMotorRun = giMotorRuntime;
break;
}
switch (iMode) {
case RASPY:
switch (giMotorDirection) {
case LEFT:
#ifdef _LED_MOTOR_
LEDON
LIGHTON
delay(iMotorRun - 10);
LEDOFF
LIGHTOFF
delay(15);
#else
if (giLightState == LIGHT_STATE_ON) {
LIGHTOFF
}
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, HIGH);
analogWrite(MotorOutPin2, iSpeed);
}
delay(iMotorRun);
if (giLightState == LIGHT_STATE_ON) {
LIGHTON
}
digitalWrite(MotorOutPin2, HIGH);
giMotorDirection = RIGHT;
giWingPosition = LEFT;
#endif
break;
case RIGHT:
#ifdef _LED_MOTOR_
LEDON
LIGHTON
delay(iMotorRun - 10);
LEDOFF
LIGHTOFF
delay(15);
#else
if (giLightState == LIGHT_STATE_ON) {
LIGHTOFF
}
if (giMotorState == MOTOR_STATE_ON) {
analogWrite(MotorOutPin1, iSpeed);
digitalWrite(MotorOutPin2, HIGH);
}
delay(iMotorRun);
if (giLightState == LIGHT_STATE_ON) {
LIGHTON
}
digitalWrite(MotorOutPin1, HIGH);
giMotorDirection = LEFT;
giWingPosition = RIGHT;
#endif
break;
default:
#ifdef _LED_MOTOR_
LEDON
LIGHTON
delay(iMotorRun - 10);
LEDOFF
LIGHTOFF
delay(15);
#else
if (giLightState == LIGHT_STATE_ON) {
LIGHTOFF
}
if (giMotorState == MOTOR_STATE_ON) {
analogWrite(MotorOutPin1, iSpeed);
digitalWrite(MotorOutPin2, HIGH);
}
delay(iMotorRun);
if (giLightState == LIGHT_STATE_ON) {
LIGHTON
}
digitalWrite(MotorOutPin1, HIGH);
giMotorDirection = LEFT;
giWingPosition = RIGHT;
#endif
break;
}
break;
case GENTLY:
switch (giMotorDirection) {
case LEFT:
#ifdef _LED_MOTOR_
LEDON
LIGHTON
delay(iMotorRun - 10);
LEDOFF
LIGHTOFF
delay(15);
#else
if (giLightState == LIGHT_STATE_ON) {
LIGHTOFF
}
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, iSpeed);
analogWrite(MotorOutPin2, LOW);
}
delay(iMotorRun);
if (giLightState == LIGHT_STATE_ON) {
LIGHTON
}
digitalWrite(MotorOutPin1, LOW);
giMotorDirection = RIGHT;
giWingPosition = LEFT;
#endif
break;
case RIGHT:
#ifdef _LED_MOTOR_
LEDON
LIGHTON
delay(iMotorRun - 10);
LEDOFF
LIGHTOFF
delay(15);
#else
if (giLightState == LIGHT_STATE_ON) {
LIGHTOFF
}
if (giMotorState == MOTOR_STATE_ON) {
analogWrite(MotorOutPin1, LOW);
digitalWrite(MotorOutPin2, iSpeed);
}
delay(iMotorRun);
if (giLightState == LIGHT_STATE_ON) {
LIGHTON
}
digitalWrite(MotorOutPin2, LOW);
giMotorDirection = LEFT;
giWingPosition = RIGHT;
#endif
break;
default:
#ifdef _LED_MOTOR_
LEDON
LIGHTON
delay(iMotorRun - 10);
LEDOFF
LIGHTOFF
delay(15);
#else
if (giLightState == LIGHT_STATE_ON) {
LIGHTOFF
}
if (giMotorState == MOTOR_STATE_ON) {
analogWrite(MotorOutPin1, LOW);
digitalWrite(MotorOutPin2, iSpeed);
}
delay(iMotorRun);
if (giLightState == LIGHT_STATE_ON) {
LIGHTON
}
digitalWrite(MotorOutPin2, LOW);
giMotorDirection = LEFT;
giWingPosition = RIGHT;
#endif
break;
}
break;
default:
break;
}
}
// Moves tail in center position and rattle for ciRattles number of times
void Rattle(int iNumOfRattles) {
int iI;
switch (giMotorDirection) {
case LEFT:
// If not yet happened: Move tail to center position
if (giWingPosition != CENTER) {
#ifdef _LED_MOTOR_
LEDON
LIGHTON
#else
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, HIGH);
digitalWrite(MotorOutPin2, LOW);
}
#endif
delay(int(giMotorRuntime / 2));
#ifdef _LED_MOTOR_
LEDOFF
LIGHTOFF
#else
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin2, HIGH);
}
#endif
}
for (iI = 0; iI < iNumOfRattles; iI++) {
#ifdef _LED_MOTOR_
LEDON
LIGHTON
#else
if (giLightState == LIGHT_STATE_ON) {
LIGHTOFF
}
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, LOW);
digitalWrite(MotorOutPin2, HIGH);
}
#endif
delay(int(giMotorRuntime / 5) + MOTORCOMPENSATION);
#ifdef _LED_MOTOR_
LEDOFF
LIGHTOFF
#else
if (giLightState == LIGHT_STATE_ON) {
LIGHTON
}
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, HIGH);
digitalWrite(MotorOutPin2, LOW);
}
#endif
delay(int(giMotorRuntime / 5));
}
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin2, HIGH);
}
giMotorDirection = RIGHT;
break;
case RIGHT:
// Falls noch nicht geschehen: Mtze aufstellen
if (giWingPosition != CENTER) {
#ifdef _LED_MOTOR_
LEDON
LIGHTON
#else
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, LOW);
digitalWrite(MotorOutPin2, HIGH);
}
#endif
delay(int(giMotorRuntime / 2));
#ifdef _LED_MOTOR_
LEDOFF
LIGHTOFF
#else
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, HIGH);
}
#endif
}
for (iI = 0; iI < iNumOfRattles; iI++) {
#ifdef _LED_MOTOR_
LEDON
LIGHTON
#else
if (giLightState == LIGHT_STATE_ON) {
LIGHTOFF
}
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, HIGH);
digitalWrite(MotorOutPin2, LOW);
}
#endif
delay(int(giMotorRuntime / 5));
#ifdef _LED_MOTOR_
LEDOFF
LIGHTOFF
#else
if (giLightState == LIGHT_STATE_ON) {
LIGHTON
}
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, LOW);
digitalWrite(MotorOutPin2, HIGH);
}
#endif
delay(int(giMotorRuntime / 5) + MOTORCOMPENSATION); // add to compensate
}
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, HIGH);
}
giMotorDirection = LEFT;
break;
default:
// If not yet happened: Move tail to center position
if (giWingPosition != CENTER) {
#ifdef _LED_MOTOR_
LEDON
LIGHTON
#else
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, LOW);
digitalWrite(MotorOutPin2, HIGH);
}
#endif
delay(int(giMotorRuntime / 2));
#ifdef _LED_MOTOR_
LEDOFF
LIGHTOFF
#else
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, HIGH);
}
#endif
}
for (iI = 0; iI < iNumOfRattles; iI++) {
#ifdef _LED_MOTOR_
LEDON
LIGHTON
#else
if (giLightState == LIGHT_STATE_ON) {
LIGHTOFF
}
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, HIGH);
digitalWrite(MotorOutPin2, LOW);
}
#endif
delay(int(giMotorRuntime / 10));
#ifdef _LED_MOTOR_
LEDON
LIGHTON
#else
if (giLightState == LIGHT_STATE_ON) {
LIGHTON
}
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, LOW);
digitalWrite(MotorOutPin2, HIGH);
}
#endif
delay(int(giMotorRuntime / 10));
}
if (giMotorState == MOTOR_STATE_ON) {
digitalWrite(MotorOutPin1, HIGH);
}
giMotorDirection = LEFT;
break;
}
giWingPosition = CENTER;
}
// Moves tail in center position and shake for iNumberOfShakes number of times
void Shake(int iNumberOfShakes) {
int iI;
switch (giMotorDirection) {
case LEFT:
// If desired: Move tail into center position
/* if (giWingPosition != CENTER) {
digitalWrite(MotorOutPin1, HIGH);
digitalWrite(MotorOutPin2, LOW);
delay(int(giMotorRuntime/2));
digitalWrite(MotorOutPin2, HIGH);
}*/
// digitalWrite(LED_BUILTIN, HIGH);
for (iI = 0; iI < iNumberOfShakes; iI++) {
#ifdef _LED_MOTOR_
LEDON
LIGHTON
#else
digitalWrite(MotorOutPin1, LOW);
digitalWrite(MotorOutPin2, HIGH);
#endif
delay(int(giMotorRuntime / 5) + MOTORCOMPENSATION); // add to compensate
#ifdef _LED_MOTOR_
LEDOFF
LIGHTOFF
#else
digitalWrite(MotorOutPin1, HIGH);
digitalWrite(MotorOutPin2, LOW);
#endif
delay(int(giMotorRuntime / 5));
#ifndef _LED_MOTOR_
digitalWrite(MotorOutPin2, HIGH);
// digitalWrite(LED_BUILTIN, HIGH);
#endif
delay(SHAKE_DELAY);
}
delay(SHAKE_DELAY);
giMotorDirection = RIGHT;
break;
case RIGHT:
// If desired: Move tail into center position
/* if (giWingPosition != CENTER) {
digitalWrite(MotorOutPin1, LOW);
digitalWrite(MotorOutPin2, HIGH);
delay(int(giMotorRuntime/2));
digitalWrite(MotorOutPin1, HIGH);
} */
for (iI = 0; iI < iNumberOfShakes; iI++) {
#ifdef _LED_MOTOR_
LEDON
LIGHTON
#else
digitalWrite(MotorOutPin1, HIGH);
digitalWrite(MotorOutPin2, LOW);
#endif
delay(int(giMotorRuntime / 5) + 10);
#ifdef _LED_MOTOR_
LEDOFF
LIGHTOFF
#else
digitalWrite(MotorOutPin1, LOW);
digitalWrite(MotorOutPin2, HIGH);
#endif
delay(int(giMotorRuntime / 5) + MOTORCOMPENSATION); // add to compensate
#ifndef _LED_MOTOR_
digitalWrite(MotorOutPin1, HIGH);
#endif
// digitalWrite(LED_BUILTIN, HIGH);
delay(SHAKE_DELAY);
}
delay(SHAKE_DELAY);
giMotorDirection = LEFT;
break;
default:
// If desired: Move tail into center position
/* if (giWingPosition != CENTER) {
digitalWrite(MotorOutPin1, LOW);
digitalWrite(MotorOutPin2, HIGH);
delay(int(giMotorRuntime/2));
digitalWrite(MotorOutPin1, HIGH);
} */
for (iI = 0; iI < iNumberOfShakes; iI++) {
#ifdef _LED_MOTOR_
LEDON
LIGHTON
#else
digitalWrite(MotorOutPin1, HIGH);
digitalWrite(MotorOutPin2, LOW);
#endif
delay(int(giMotorRuntime / 5));
#ifdef _LED_MOTOR_
LEDOFF
LIGHTOFF
#else
digitalWrite(MotorOutPin1, LOW);
digitalWrite(MotorOutPin2, HIGH);
#endif
delay(int(giMotorRuntime / 5) + MOTORCOMPENSATION); // add to compensate
#ifndef _LED_MOTOR_
digitalWrite(MotorOutPin1, HIGH);
digitalWrite(LED_BUILTIN, HIGH);
#endif
delay(SHAKE_DELAY);
}
delay(SHAKE_DELAY);
giMotorDirection = LEFT;
break;
}
giWingPosition = CENTER;
}
//Setting the temperature sensor
void SetupDS18B20() {
DS18B20.begin();
#ifdef _DEBUG_
Serial.print("Parasite power is: ");
if ( DS18B20.isParasitePowerMode() ) {
Serial.println("ON");
}
else {
Serial.println("OFF");
}
#endif
giNumberOfTempSensors = DS18B20.getDeviceCount();
#ifdef _DEBUG_
Serial.print( "Device count: " );
Serial.println( giNumberOfTempSensors );
#endif
lastTemp = millis();
DS18B20.requestTemperatures();
// Loop through each device, print out address
for (int i = 0; i < giNumberOfTempSensors; i++) {
// Search the wire for address
if ( DS18B20.getAddress(devAddr[i], i) ) {
//devAddr[i] = tempDeviceAddress;
#ifdef _DEBUG_
Serial.print("Found device ");
Serial.print(i, DEC);
Serial.print(" with address: " + GetAddressToString(devAddr[i]));
Serial.println();
#endif
}
#ifdef _DEBUG_
else {
Serial.print("Found ghost device at ");
Serial.print(i, DEC);
Serial.print(" but could not detect address. Check power and cabling");
}
//Get resolution of DS18b20
Serial.print("Resolution: ");
Serial.print(DS18B20.getResolution( devAddr[i] ));
Serial.println();
//Read temperature from DS18b20
float tempC = DS18B20.getTempC( devAddr[i] );
Serial.print("Temp C: ");
Serial.println(tempC);
#endif
}
}
void handlePushButtonInterrupt() {
glPushInterrupts[giPushInterrupts] = millis();
if (giPushInterrupts < (MAX_PUSHINTERRUPTS - 1)) giPushInterrupts++;
}
int EvaluatePushButton() {
int iStartIndex = 0;
int iEndIndex = 1;
int iIndex;
int iPushes;
giNumberOfPushButtonPressed = 1;
#ifdef _DEBUG_
Serial.print("giPushInterrupts: ");
Serial.println(giPushInterrupts);
#endif
if (giPushInterrupts > 1) {
if (digitalRead(PUSHBUTTONPIN) == LOW) {
if (giButtonState == STATE_BUTTON_MENU) {
giButtonState = STATE_BUTTON_MANUAL_MODE;
}
else {
giButtonState = STATE_BUTTON_MENU;
}
giPushInterrupts = 0;
giNumberOfPushButtonPressed = 0;
// Long button press detected
return 0;
}
else {
for (iIndex = 0; iIndex < giPushInterrupts - 1; iIndex++) {
if (glPushInterrupts[iEndIndex] - glPushInterrupts[iStartIndex] < BOUNCE_INTERVAL) {
// Bounce Push detected
if (iEndIndex < MAX_PUSHINTERRUPTS) {
iEndIndex++;
}
}
else {
// Real Push detected
giNumberOfPushButtonPressed++;
if (iStartIndex < MAX_PUSHINTERRUPTS) {
iStartIndex = iIndex + 1;
}
if (iEndIndex < MAX_PUSHINTERRUPTS - 1) {
...
This file has been truncated, please download it to see its full contents.











_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
Comments