



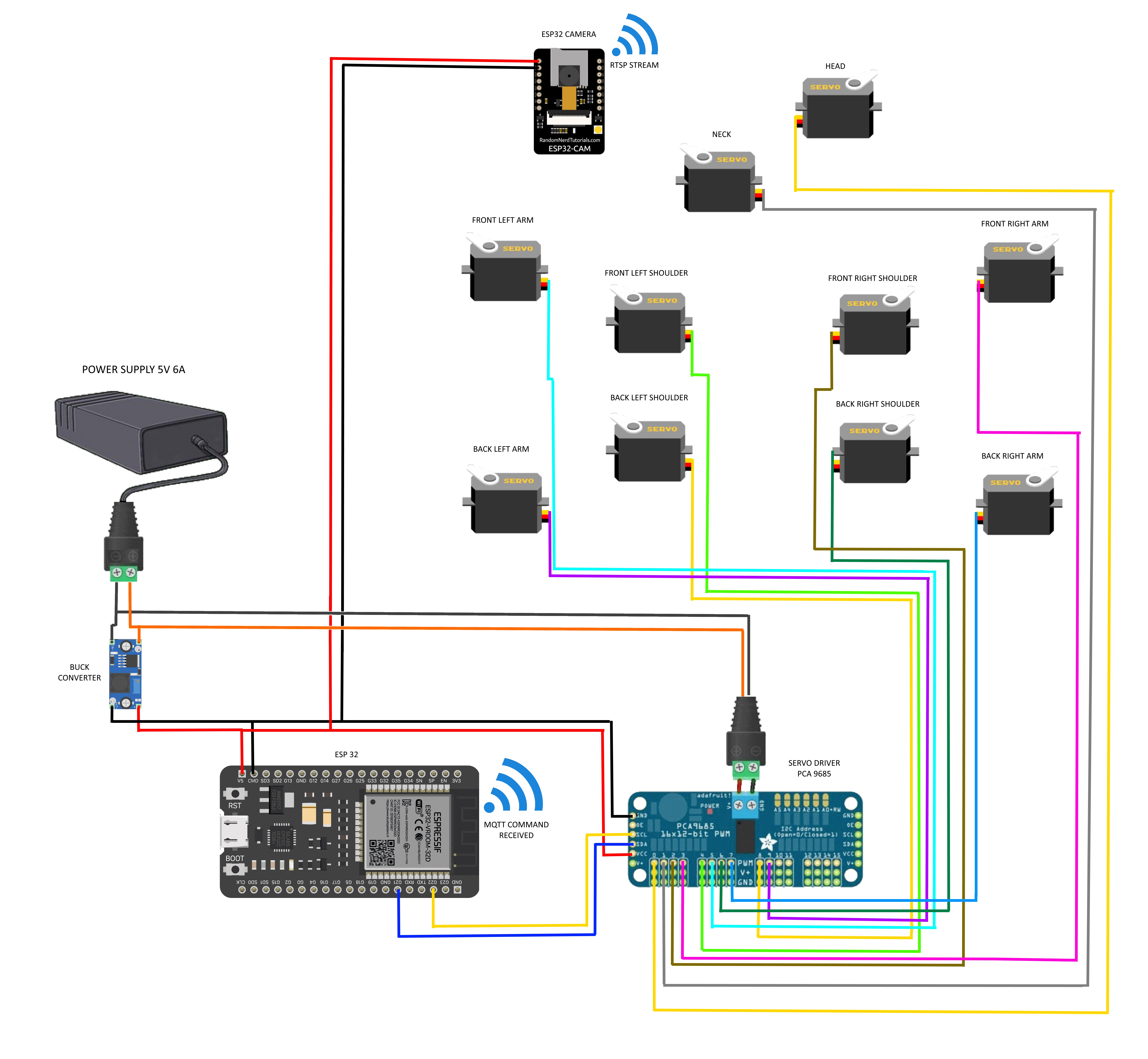
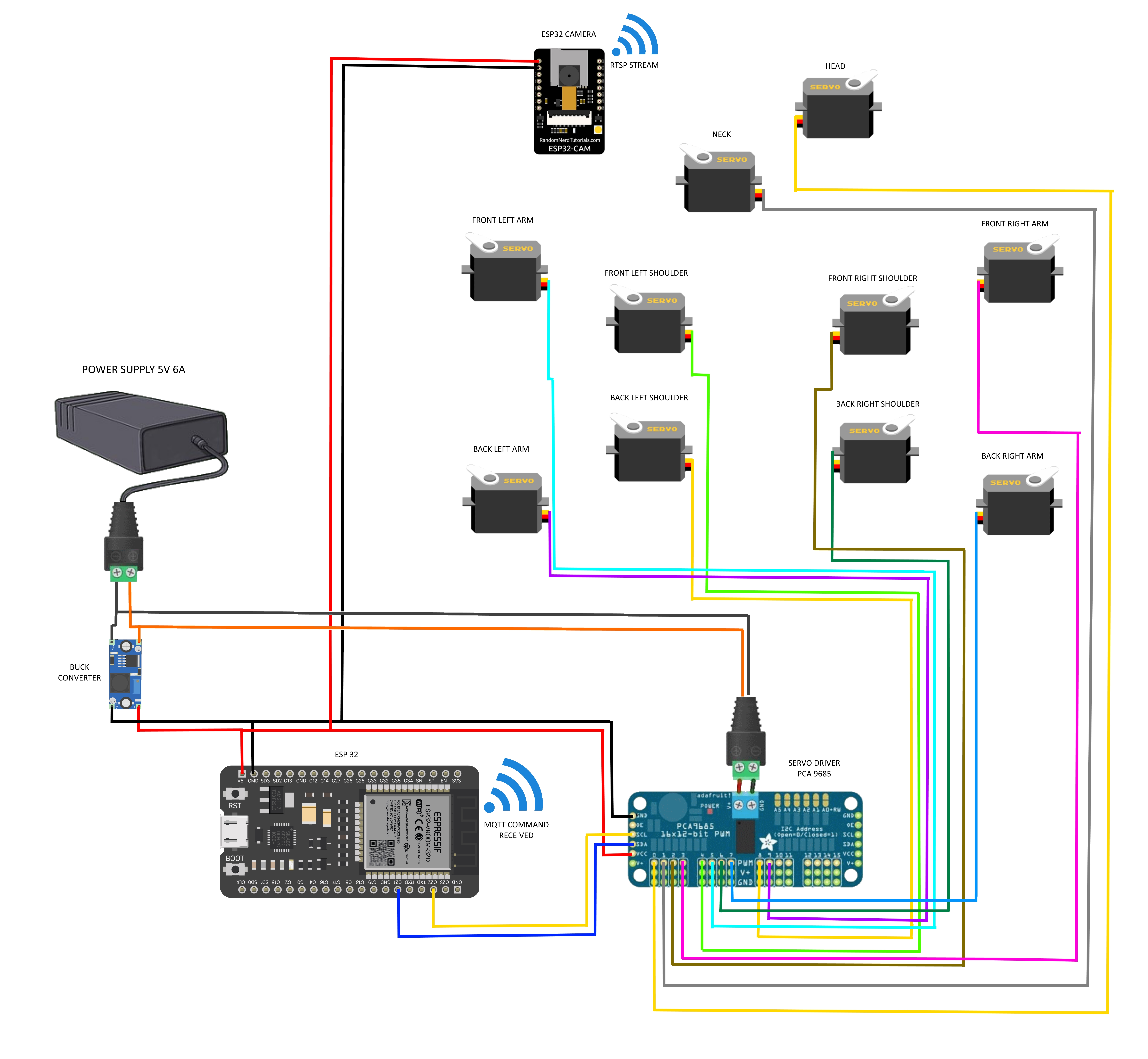
This new version hasn't the raspberry on board but uses an ESP32 onboard only to control the servomotors;
The commands are sent directly from the PC to ESP32 via MQTT throught the local network.
Mosquitto, local installation, is used as a mqtt server.
The webcam, located in the robot's head, captures the video and sends it to the network via rtsp to be catched by the PC.The project is actually work in progress.



{kind=link}
Comments