

Massive IO telescope control systems provide remote access to all telescope peripherals including focusers, heaters, temp sensors, cameras, rs-232 devices and mount control. Core functions are controlled by the CPU driven Telescope Super Controller (TSC). The TSCII provides connectivity and communications to all devices at the mount via a single data connection. Portable or fixed mounts may be reliably operated from local or remote locations.
Project underway to replace Stamp BS2 and proposed mini PC with Raspberry Pi as central controller for FAC's next generation telescope controller. Initial progress has been made on component choices, intial pcb fabrication designs are underway. Prototype case designs are being developed with 3D print technology.
Project updates will be posted here as material becomes available.
Article coverage includes:
- Pi USB internal IO device connectivity
- Multi port RS-232 modules
- DC motor control
- Temp/Humidity control
- POL DC-DC converters
- ASCOM driver integration
Sketchup of TSCIII with built in fit2-PC
TSC model III features built in PC with 6 USB ports 4 com ports, PWM motor control, temp monitoring and heater control. PC based observatory software can be run on internal PC to make TSCIII a complete telescope control and observation server in one package.
Legacy TSCII details
RS-232 com port x 3
- Can set com port numbers with Windows Device Manager
- 3com ports available for mount, rotators, temperature controlled focuses, etc
- 3 separate high speed DLP serial UARTS
- RJ11 style plugs reduces connector bulk (cables included)
Dual 9-12VDC focus motor controller
- 128 step rates for fast or slow rotation high torque motor control
- Can turn the motor shaft in increments less .1mm
- Focus motor hand controller to control speed, direction and focuser selection
- Software controllable. Interfaces to TSC control app (includced)
3 x heater control
- -50c to 120c sensing range
- Accurate within .5c
- Temperature logging
- Control set points to activate heaters when dew point is reached
7 port USB 2.0 Hub
- 4 External ports for cameras and or RS-232 converters
- 3 Internal ports uses by com devices and internal processor
- Can operate and capture from multiple high speed USB cameras simultaneously(USB 2.0 enhanced)
- Ports can be connected to RS-232 converters to control additional peripherals such as TCF devices, rotators, adaptive optics, spectrum analyzers, filter wheels etc.
- Single USB connection to PC connects the 7 port hub as well as internal converters and processors
3 x Internal power supplies
- Uses multiple high efficiency miniature isolated DC to DC converters
- 10 amp maximum capacity
- 5 volts at 4 amps (USB hub and internal electronics)
- 9 volts at 1 amp (focus motors)
- 12 volts at 8 amps (mount, external peripherals, heaters).
- 2 x DC 2.5mm center pin power connectors for external peripherals
- Internal SBIG Power supply (+12/-12/+5) with SBIG DIN connector
- Military stylemain power connector with gold plated pins
Internal PIC processor
- Controls integration between hand controller and computer based focus control
- Monitors temperature probes
- Controls dew heaters
- Monitors overall operation of TSC
- Future development
Software
- Comes with control software for controlling focus motors and dew heaters
- Can be used along with Observatory software that uses com ports or ASCOM
- Use favorite remote control software (RDP, PC Anywhere, VNC) to control host pc and thus gain control over all peripherals
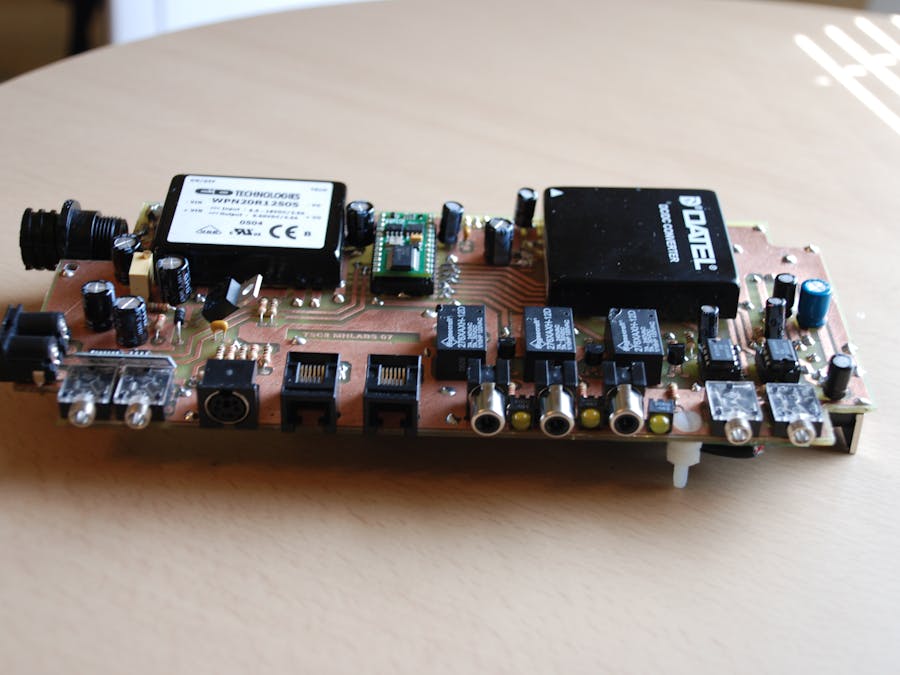
Pictures of TSCII in action
Future Addons
- Touch panel interface
- Other microcontrollers
- Voice recognition mount control
- Full wireless using induction rechargeable battery at mounts park position
Induction charger concept
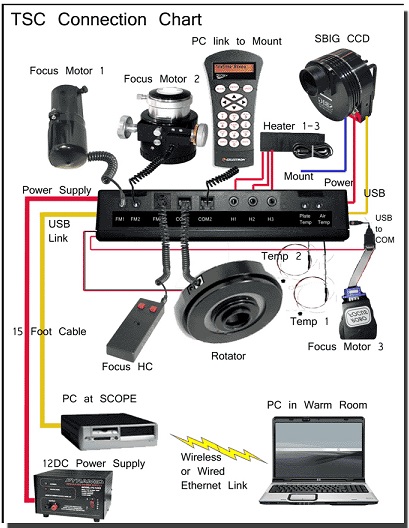
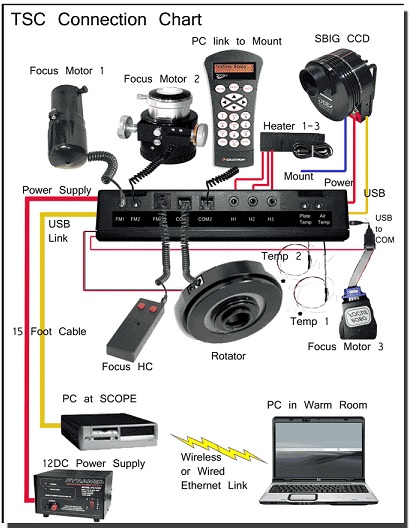
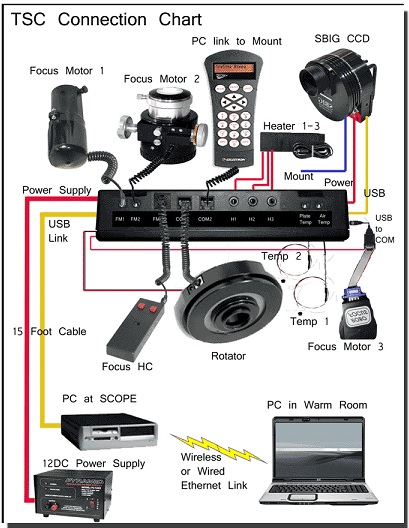
Connection Diagram



{kind=link}
{kind=link}
{kind=link}
Comments