

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 2 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
This project is made for our college lesson "Intelligent open source hardware foundation", with the attribute of four members in all: Niu Zhiman, Wang Ziyi, Yin Xinyue and me.
It was really a tough but fun experience to go through, and we made it at last. It is the result of this experiment: Based on Arduino platform, through code control and hardware construction, our project has three modes for the cat ears hairpin, uses heart rate sensor to measure heart rate and ultrasonic sensor to measure distance, makes the equipment wearable through welding circuit and external power supply, and makes it more beautiful by making plush appearance.
How we make it in steps:
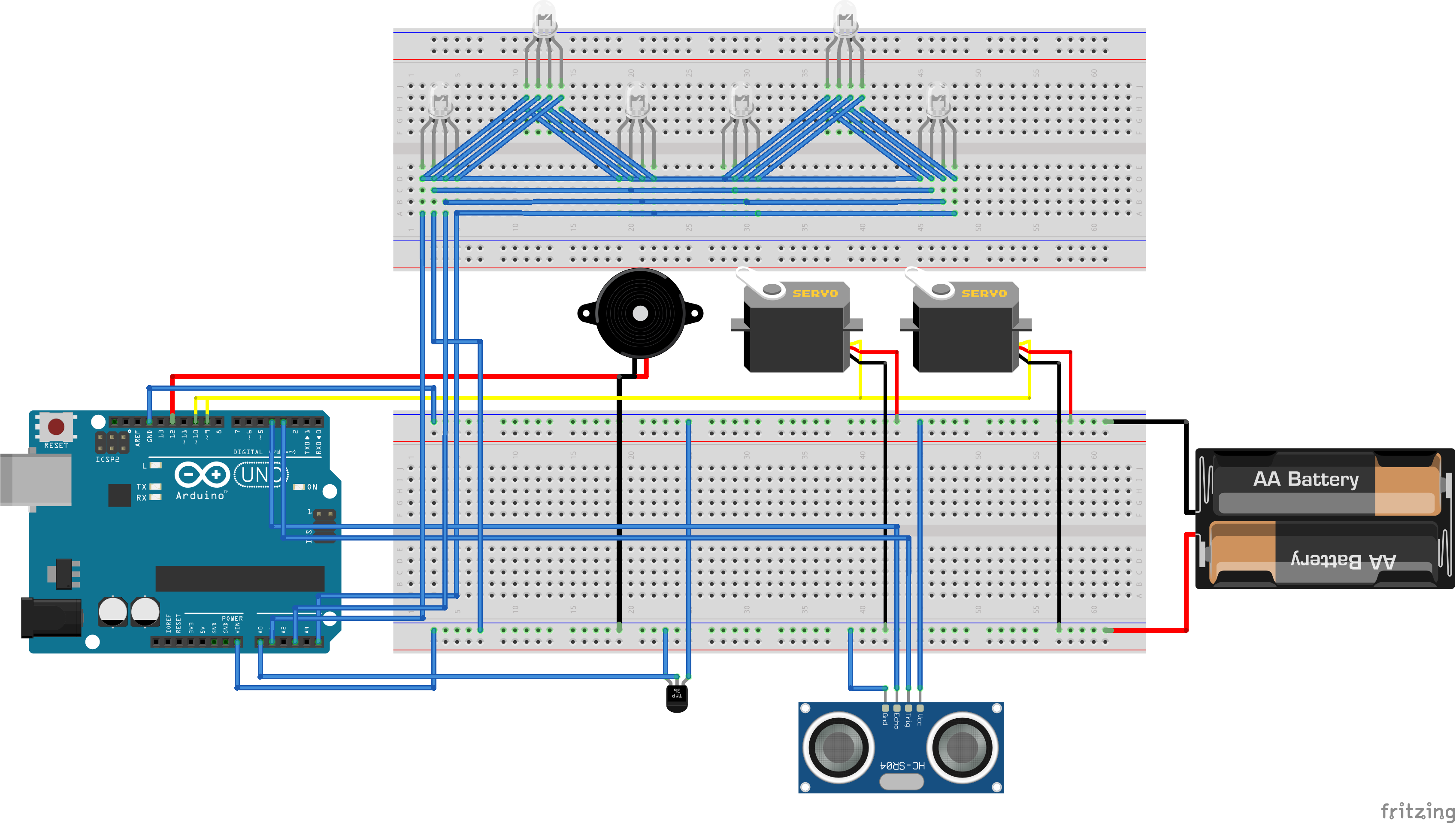
Step 1: Implement functions on the bread board
Purchase the required materials and test the feasibility of heart rate sensor, servo and ultrasonic sensor. Download <Servo.h> and <PulseSensorPlayground.h>, both of which is initially contained in Arduino. Then programme and write functions.
Step 2: Weld circuit to implement wearable function
From this step, instead of using the computer for power supply, the product is powered by directly connecting the batteries to the Arduino uno board. Pay attention to the length of the wire and route it reasonably.
Step 3: Decorate it with plush cloth
This is the time to test our handcraft skills……
This product still has some shortcomings, mainly due to the improper selection of conductor materials (because they are too brittle and easy to break) and our not-good-enough program design.
Hope our project will be inspired to you! :)






{kind=link}
Comments