


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
This project is created in context of the lecture “Internet of Things Ecosystems” at the University of Applied Science Esslingen. It covers the invention of an own IoT Idea and Application from the scratch solving a real-world problem. In the design sprints the students learn about design, implementation (full-stack) and business aspects of Internet of Things applications.
IoT Prototyping FrameworkThe IoT Prototyping Framework (IoTPF) is a collection of tools, modules and samples with the aim to empower students and developers creating full-stack IoT prototypes in a short time period.
Contact:Idea and Application: Martin Dahm and Julian Maier
Lecture and IoTPF: dionysios.satikidis@gmail.com
Tools:
University of applied Sciences Esslingen 2018
StoryThis is a little story about the course "IoT Ecosystem" at the University of Applied Science Esslingen. During the course we had to design a IoT system that solves a concrete problem.
So this story is about "N.E.O." - the "Networkconnected Entrance Observator".
At the University of Applied Sciences Esslingen, location Flandernstraße there is a student managed Café. The Café is very popular because it's a cozy place with cheap prices for coffee and snacks. But the cafés opening hours are very flexible, as all students working there to make it possible in the first place do that voluntarily. So every now and then it's possible to find the cafés door closed. This is very annoying =(
IdeaOur idea is to publish the opening state of the café online. A customer should be able to check the opening state of the café via smartphone or computer. There is a direct mapping between the open door of the café and the café state in general. So all we have to do is detecting the door state and publish it online.
The café employees should also be able to control the café state e.g. during tidying the café in the evening or team meetings in the summer.
Solution- Detect the door state
- Send café state events to the Particle Cloud
- Publish café state via Losant-Dashboards or Telegram-Bot
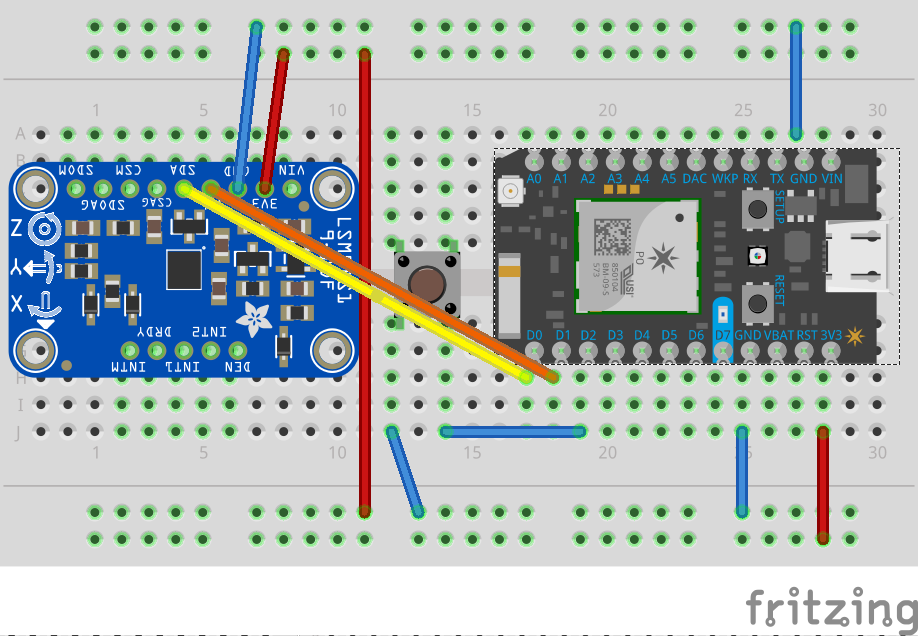
We use a magnetic sensor (the SparkFun LSM9DS1) and a permanent magnet for the door state detection. The magnetic values have the advantage that we don't need any kind of historic values, as we can detect directly if the door is open or closed. Additionally it is very easy to configure the system at different doors. The system needs a calibration phase for teaching the state "open" and "closed" - simply remembering the three axis values of the magnetic sensor.
On the Particle Photon, a state machine is running that periodically polls the sensor values and generates events according to the door state.
In Losant, the Particle Events trigger a workflow to convert the Particle format to a format that's understandable for the Losant-Dashboard. Another workflow monitors the particle in general to detect a possible offline state of the system.
The left dashboard shows the customer view (currently with the "system offline" screen). It is a public dashboard so everyone with the right URL has access. The dashboard on the right side is for the café employees. It is the interface for calibration and locking the café state.
To realize push notifications we decide to implement a Bot for the Telegram Messenger. The Particle Cloud and Telegram offer both a REST API for easy access. The Bot logic itself is implemented as a python3 script and offers a limited functionality for subscribe, unsubscripte and polling from the N.E.O. system.
- Particle Cloud: https://docs.particle.io/reference/api/
- Telegram Bots: https://core.telegram.org/bots/api
To become more familiar with the problem and the needs of the customers and employees we used different communication channels. We got a clearer view through live demonstrations of our prototype and an online user survey.
We experienced a lot of different aspects during this IoT project. Our assistant professor trained us to not only think in the boundary of a technical solution.
The system N.E.O. will go online during the next term at the HZE Café.
Julian Maier, Martin Dahm
Check out if the HZE Café is open: Link-to-site
Read more about the HZE Café: http://www.hs-esslingen.de/de/hochschule/service/campusleben/hze-cafe-flandernstrasse.html








_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments