


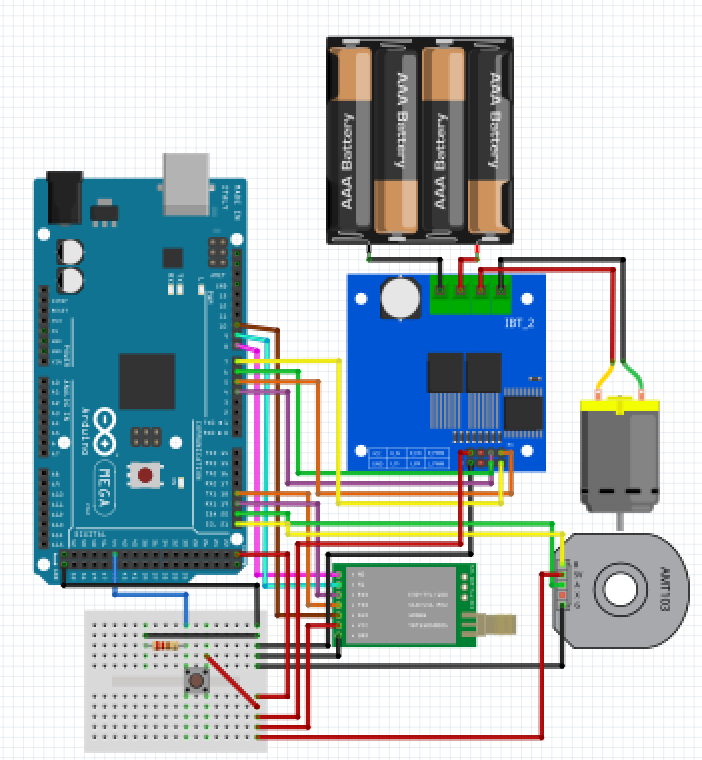
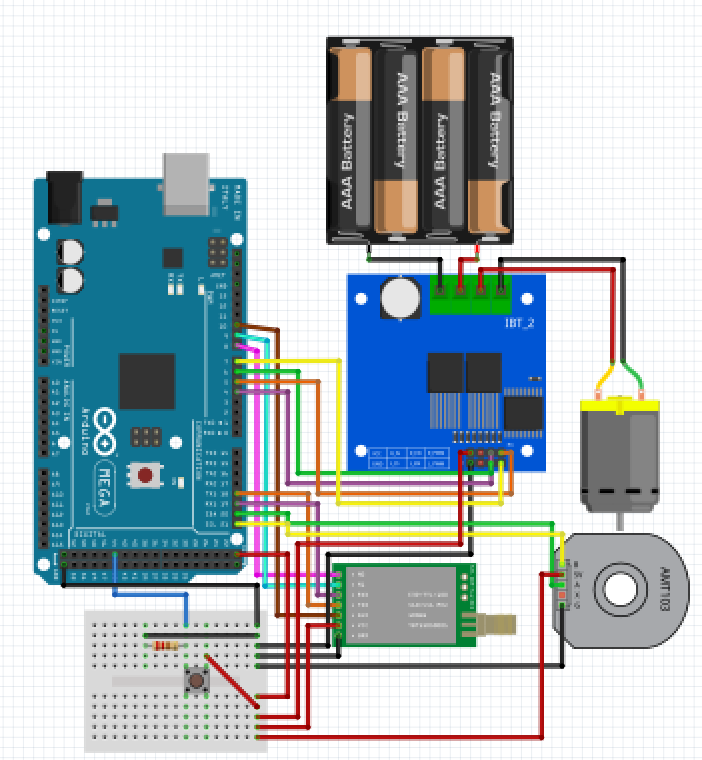
Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
will be added soon
#define ENCODER0PINA 20 // this pin needs to support interrupts
#define ENCODER0PINB 21 // no interrupt required
#define CPR 1250 // encoder cycles per revolution
#define CLOCKWISE 1 // direction constant
#define COUNTER_CLOCKWISE 2 // direction constant
#define RPWM 5
#define LPWM 7
#define REN 4
#define LEN 6
EBYTE Transceiver(&ESerial, PIN_M0, PIN_M1, PIN_AX);
// variables modified by interrupt handler must be declared as volatile
volatile long encoder0Position = 0;
volatile long interruptsReceived = 0;
// track last position on encoder so we know whether it's worth printing new output
long previousPosition = 0;
//int pastPosition = 0; //stored last encoder position for error; different because of type. only used for Derror
// track direction: 0 = counter-clockwise; 1 = clockwise
short currentDirection = CLOCKWISE;
float Pgain = .04;
float Igain = .002;
float Dgain = .007;
int Ierror = 0;
int Pasterror = 0;
struct DATA2{
int Count2;
};
DATA2 MyData2;
void setup()
{
Serial.begin(9600);
ESerial.begin(9600);
Serial.println("Starting Sender");
Transceiver.init();
Transceiver.SetAddressH(1);
Transceiver.SetAddressL(0);
Transceiver.SetChannel(5);
Transceiver.SetMode(MODE_NORMAL);
Transceiver.SetAirDataRate(ADR_1200);
Transceiver.SetOptions(0b01000100);
Transceiver.SaveParameters(PERMANENT);
Serial.println(Transceiver.GetAirDataRate());
Serial.println(Transceiver.GetChannel());
Transceiver.PrintParameters();
//Motor Driver outputs
for(int i = 4; i <= 7; i++){
pinMode(i, OUTPUT);
}
digitalWrite(LEN, HIGH);
digitalWrite(REN, HIGH);
// Encoder inputs
pinMode(ENCODER0PINA, INPUT);
pinMode(ENCODER0PINB, INPUT);
// interrupts
attachInterrupt(3, onInterrupt, RISING);
}
void loop()
{
Transceiver.GetStruct(&MyData2, sizeof(MyData2));
Serial.print("Recieved: ");Serial.println(MyData2.Count2);
int currentPosition = encoder0Position;
/*
Serial.print(MyData2.Count2);
Serial.print(",");
Serial.println(currentPosition);
*/
Serial.print("Curret: ");Serial.println(currentPosition);
int Perror = abs(MyData2.Count2 - currentPosition);
Ierror = Ierror + Perror;
int Derror = abs(Perror - Pasterror);
if (Ierror > 25000)
{
Ierror = 25000;
}
int motorspeed = (Pgain * Perror) + (Igain * Ierror) + (Derror * Dgain);
if (motorspeed > 200)
{
motorspeed=200; //this defines the max speed
}
//Serial.println(Derror);
if (MyData2.Count2 > currentPosition+500)
{
//Serial.println("LOW"); //motor moving to the right
analogWrite(RPWM, motorspeed);
//delay(100);
}
else if (MyData2.Count2 < currentPosition-500)
{
//Serial.println("HIGH"); //motor moving to the left
analogWrite(LPWM, motorspeed);
//delay(100);
}
else
{
//Serial.println("center");
analogWrite(RPWM, 0);
analogWrite(LPWM, 0);
Ierror=0;
//delay(100);
}
delay(100);
Pasterror = Perror;
if (encoder0Position != previousPosition)
{
previousPosition = encoder0Position;
}
}
void onInterrupt()
{
// read both inputs
int a = digitalRead(ENCODER0PINA);
int b = digitalRead(ENCODER0PINB);
if (a == b )
{
// b is leading a (counter-clockwise)
encoder0Position--;
currentDirection = COUNTER_CLOCKWISE;
}
else
{
// a is leading b (clockwise)
encoder0Position++;
currentDirection = CLOCKWISE;
}
}
#include "EBYTE.h"
#define ESerial Serial1
#define PIN_M0 8
#define PIN_M1 9
#define PIN_AX 10
#define ENCODER0PINA 20 // this pin needs to support interrupts
#define ENCODER0PINB 21 // no interrupt required
#define CPR 1250 // encoder cycles per revolution
#define CLOCKWISE 1 // direction constant
#define COUNTER_CLOCKWISE 2 // direction constant
#define RPWM 5
#define LPWM 7
#define REN 4
#define LEN 6
#define Button 44
int buttonstate = LOW;
EBYTE Transceiver(&ESerial, PIN_M0, PIN_M1, PIN_AX);
// variables modified by interrupt handler must be declared as volatile
volatile long encoder0Position = 0;
volatile long interruptsReceived = 0;
// track last position on encoder so we know whether it's worth printing new output
long previousPosition = 0;
//int pastPosition = 0; //stored last encoder position for error; different because of type. only used for Derror
// track direction: 0 = counter-clockwise; 1 = clockwise
short currentDirection = CLOCKWISE;
float Pgain = .02;
float Igain = 0.005;
float Dgain = 0.01;
int Ierror = 0;
int Pasterror = 0;
struct DATA1{
int IncomingRadio;
};
struct DATA2{
int OutgoingRadio;
};
DATA1 MyData1;
DATA2 MyData2;
void setup()
{
Serial.begin(9600);
ESerial.begin(9600);
Serial.println("Starting Sender");
Transceiver.init();
Transceiver.SetAddressH(3);
Transceiver.SetAddressL(2);
Transceiver.SetChannel(5);
Transceiver.SetMode(MODE_NORMAL);
Transceiver.SetAirDataRate(ADR_1200);
Transceiver.SetOptions(0b01000100);
Transceiver.SaveParameters(PERMANENT);
Serial.println(Transceiver.GetAirDataRate());
Serial.println(Transceiver.GetChannel());
Transceiver.PrintParameters();
//Motor Driver outputs
for(int i = 4; i <= 7; i++){
pinMode(i, OUTPUT);
}
digitalWrite(LEN, HIGH);
digitalWrite(REN, HIGH);
// Encoder inputs
pinMode(ENCODER0PINA, INPUT);
pinMode(ENCODER0PINB, INPUT);
pinMode(Button, INPUT);
// interrupts
attachInterrupt(3, onInterrupt, RISING);
}
void loop()
{
buttonstate = digitalRead(Button);
Transceiver.GetStruct(&MyData1, sizeof(MyData1));
//Serial.print("Recieve: ");Serial.println(MyData1.IncomingRadio);
int inputsignal = MyData1.IncomingRadio;
int currentPosition = encoder0Position;
//SERIALPLOTTER
Serial.print(inputsignal);
Serial.print(",");
Serial.println(currentPosition);
//Serial.print("Curret: ");Serial.println(currentPosition);
int Perror = abs(inputsignal - currentPosition);
Ierror = Ierror + Perror;
int Derror = abs(Perror - Pasterror);
if (Ierror > 25000)
{
Ierror = 25000;
}
int motorspeed = (Pgain * Perror) + (Igain * Ierror) + (Derror * Dgain);
if (motorspeed > 50)
{
motorspeed=50; //this defines the max speed
}
//Serial.println(Derror);
if (inputsignal > currentPosition+250)
{
//Serial.println("LEFT"); //motor moving to the right
analogWrite(RPWM, 0);
analogWrite(LPWM,motorspeed);
//delay(100);
}
else if (inputsignal < currentPosition-250)
{
//Serial.println("HIGH"); //motor moving to the left
analogWrite(RPWM, motorspeed);
analogWrite(LPWM, 0);
//delay(100);
}
else
{
//Serial.println("center");
analogWrite(RPWM, 0);
analogWrite(LPWM, 0);
Ierror=0;
//delay(100);
}
if (buttonstate == HIGH){
encoder0Position = 0;
}
delay(20);
MyData2.OutgoingRadio = currentPosition;
Transceiver.SendStruct(&MyData2, sizeof(MyData2));
//Serial.print("Send: ");Serial.println(MyData2.OutgoingRadio);
Pasterror = Perror;
delay(20);
if (encoder0Position != previousPosition)
{
previousPosition = encoder0Position;
}
}
void onInterrupt()
{
// read both inputs
int a = digitalRead(ENCODER0PINA);
int b = digitalRead(ENCODER0PINB);
if (a == b )
{
// b is leading a (counter-clockwise)
encoder0Position--;
currentDirection = COUNTER_CLOCKWISE;
}
else
{
// a is leading b (clockwise)
encoder0Position++;
currentDirection = CLOCKWISE;
}
}


{kind=link}
Comments