My desk gets dirty from eraser marks and dust. It gets especially dirty after I finish my homework. I use a small, handheld vacuum to clean it. So what if I could put wheels on that vacuum and make it clean my desk by itself.
My vacuum
Logic
This is a diagram of the original proposal's logic.
Basic Logic
Going more in-depth with a light sensor and boolean flag, this is a more descriptive diagram. The photosensor provides information about how much light there is with a resistor whose resistance depends on the level of light. Low values for darkness and high values for brightness. Originally, the vacuum would begin to work when the light is off, meaning I could set up a threshold and if I got a light value below it, the vacuum would run. However, this means that it would keep running in the dark over and over. To prevent this, I made a start condition that involved a boolean flag. The flag becomes true when the light turns on and false once the vacuum runs. This way, the vacuum runs only if the light is turned on first and then it goes dark.
More in depth logic
Construction
1 / 6 • 4 servos for wheels
Code
Here I initialize my variables for my servos, pins, and the boolean flag.
Here I get a value from the photosensor which determines the state of my flag, lightOn. I publish the value separately for debugging.
1 / 3
This is the code for the vacuum running. Each block is a certain part of the path it takes. In each block, each servo is set to spin at a certain speed for a certain time, thus spinning the wheels and moving the vacuum.
Videos
Video 1
Another angle
The servo pushing the power button
Limitations
The frame is relatively weak and thus the wheels wobble. This causes inconsistent results, and makes it hard to program a better path that would pick up more dust and eraser marks. I would fix this by changing the frame to be made of hard plastic and I'd make it more symmetrical. Another issue is that the vacuum cannot reach my whole desk as a result of the length of the cord, however, that likely cannot be fixed as a longer cord would still need somewhere to go or something to support it.
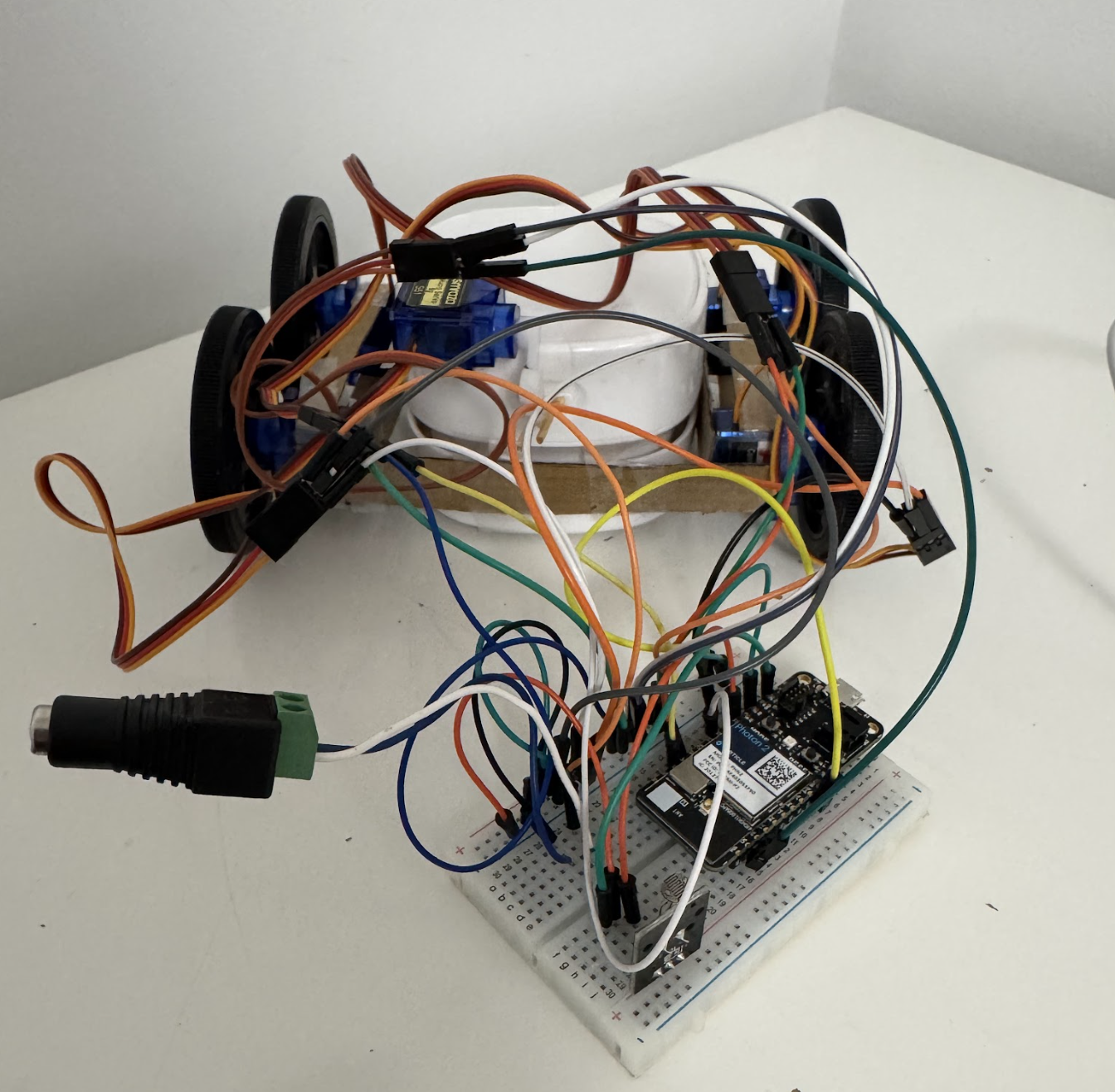
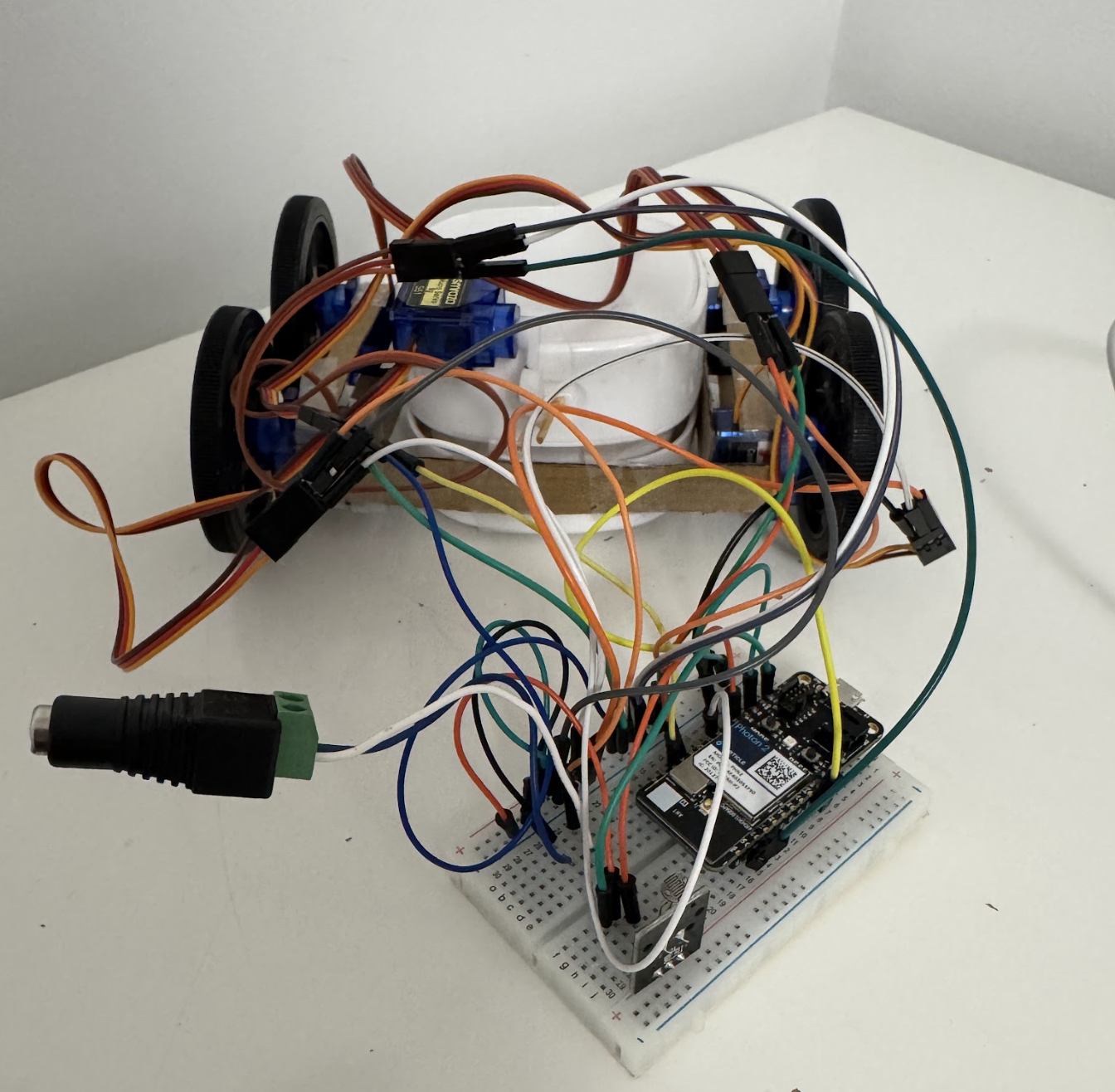
External power is what's sticking out with the white and blue wire. Connect the positive end to the positive rail and the negative end to the negative rail. A wire should go from the positive rail to VUSB. Each of the five servos and the photocell have three wires attached to them. One for power, one for ground, and one for information. Connect the power wires to the positive rail, the ground wires to the negative rail, and the information wires to the corresponding pins on the photon based on the code.
This code will tell my desk roomba to clean only if I turn on my desk light, then turn it off. A boolean flag is used to track the state of the light so that the vacuum doesn't keep running in the dark.
ServoleftFront;//wheel titlesServorightFront;ServoleftBack;ServorightBack;ServopowerButtonServo;//to push the power buttonintanalogPin=A1;//information from sensorintval=0;boollightOn=false;//flagvoidsetup(){pinMode(analogPin,INPUT);Serial.begin(9600);leftFront.attach(MOSI);rightFront.attach(A2);leftBack.attach(D1);rightBack.attach(MISO);powerButtonServo.attach(A5);}voidloop(){// read the photocellval=analogRead(analogPin);Particle.publish(String(val));//printing values for debuggingdelay(500);//if the light is on, lightOn will become trueif(val>300){lightOn=true;delay(1000);}//if the light is "on", then turns off, the robot will runif(lightOn&&val<300){powerButtonServo.write(72);//push power buttondelay(1000);powerButtonServo.write(60);//pull awaydelay(100);lightOn=false;//reset the flag//forwardsleftFront.write(103);rightFront.write(70);//flippedleftBack.write(101);rightBack.write(70);//flippeddelay(1000);//stopleftFront.write(90);rightFront.write(90);leftBack.write(90);rightBack.write(90);delay(10);//backwardsleftFront.write(69);rightFront.write(100);leftBack.write(72);rightBack.write(100);delay(1200);//turn left (right wheels faster)leftFront.write(90);rightFront.write(0);leftBack.write(90);rightBack.write(0);delay(500);//forwardsleftFront.write(105);rightFront.write(68);leftBack.write(105);rightBack.write(68);delay(1000);//backwardsleftFront.write(70);rightFront.write(100);leftBack.write(70);rightBack.write(100);delay(1000);//straighten uprightFront.write(180);leftBack.write(180);delay(350);//backwardsleftFront.write(74);rightFront.write(100);leftBack.write(74);rightBack.write(100);delay(475);//stopleftFront.write(90);rightFront.write(90);leftBack.write(90);rightBack.write(90);powerButtonServo.write(70);delay(1000);powerButtonServo.write(60);}}














{kind=link}
Comments