


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
 |
| |||||
This project uses the MPU6050 to create a simple Primary Flight Display. This display doesn't include everything that a real PFD has.
MPU6050MPU6050 is a Micro Electro-mechanical system, it consists of three-axis accelerometer and three-axis gyroscope. It can measure velocity, orientation and acceleration.
1. The MPU-6050 data is sent from Arduino to the computer via serial communication.
2. The computer receives the data.
3. The data is rendered on the PFD.
Getting started1. Upload the Arduino Sketch to your board.
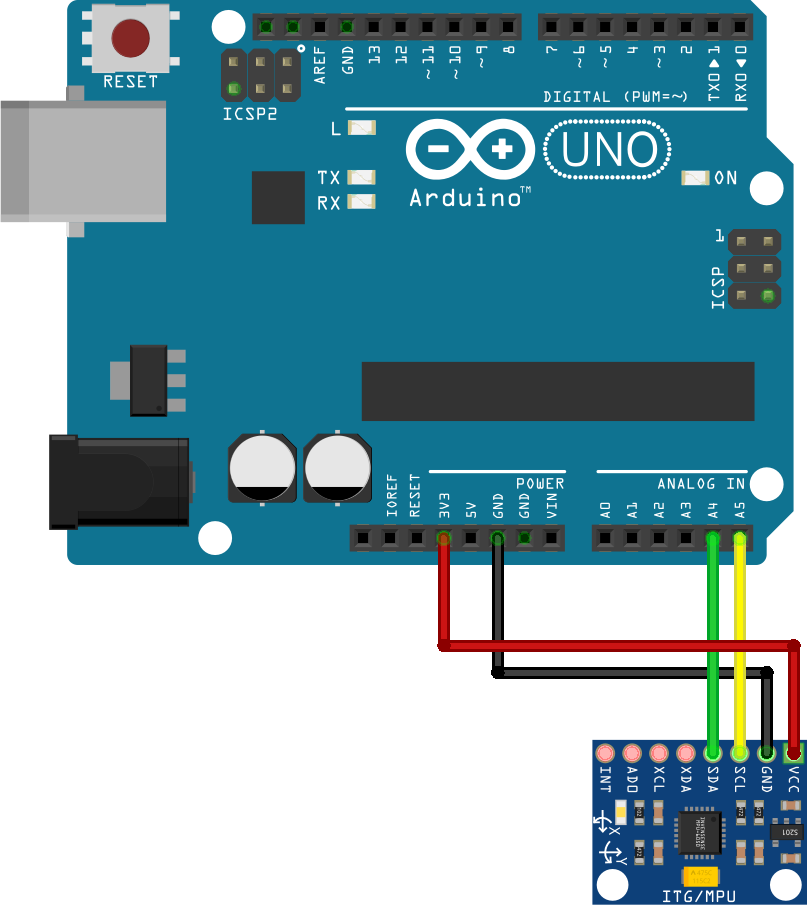
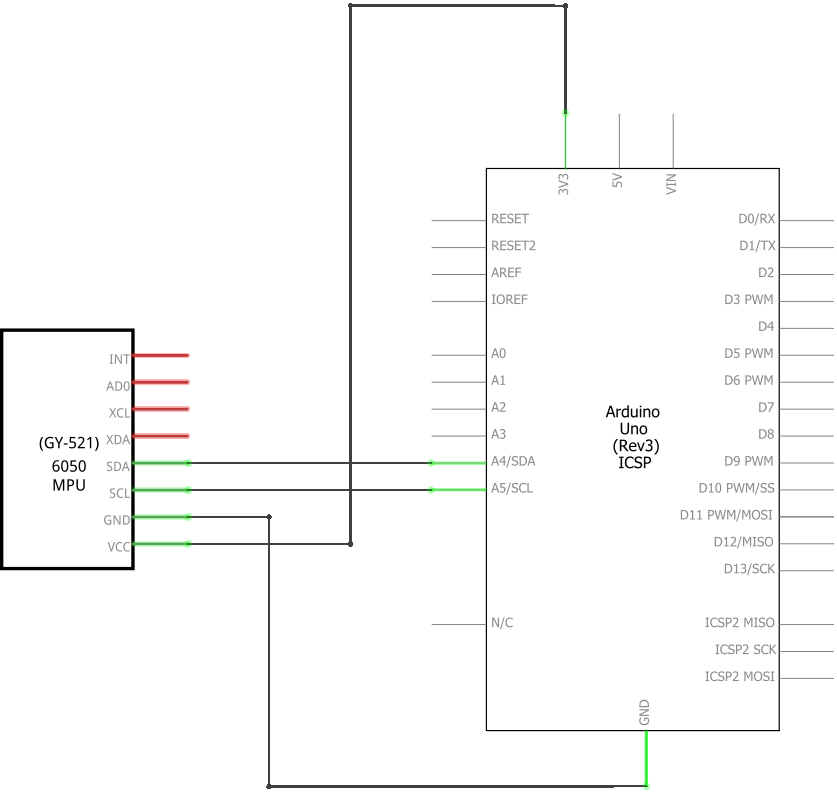
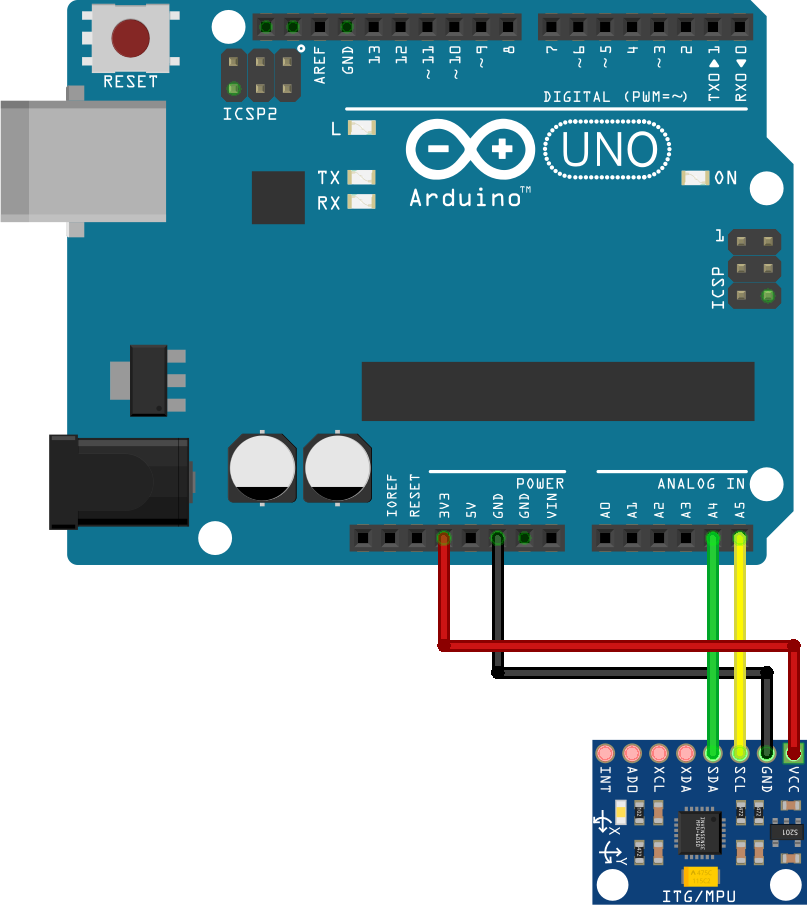
2. Wire all the components following the schematics included.
3. Power up your Arduino and launch the included Power-KI package.
Gallery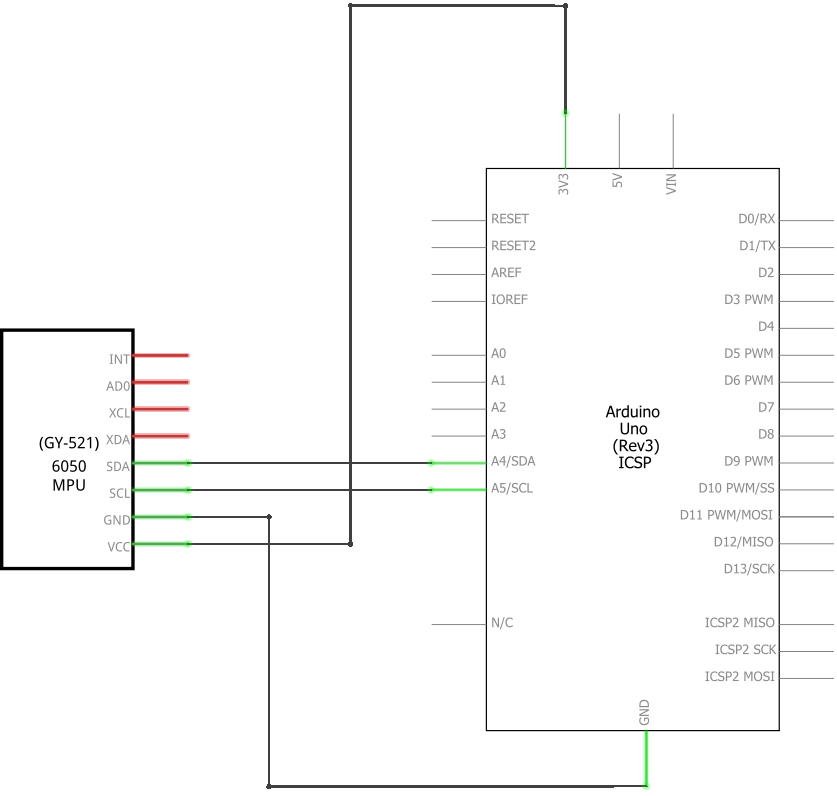
{kind=link}
{kind=link}

Comments