

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
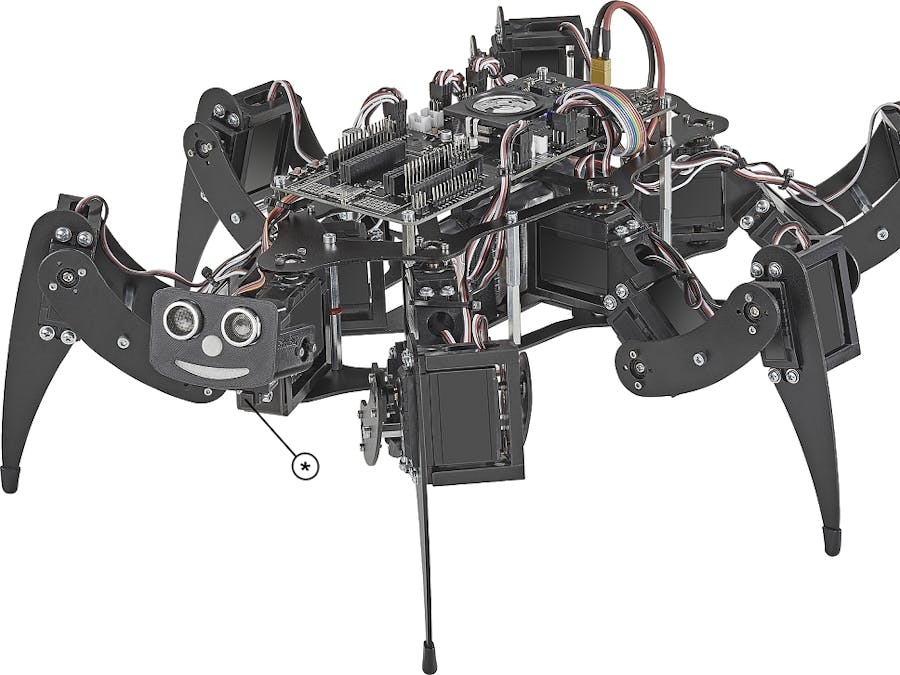
there is a genious assembly kit MAKERFACTORY Robobug:
this results in a Robobug with 6 legs, called Hexapod.
Movement of 6 legs comprising of 3 servo motors each. Movement algorithm is driven and pre programmed in an ATMEGA2560 Locomotion Controller.
using the PS2 controller for remote control it is quite nice to move the Robobug around, but the really challenge starts with own programs.
For this on the main board there is a socket for plugging in a Arduino UNO, or Node MCU.
We´ve choosen Arduino UNO, because it is so easy to use and also affordable.
Goal was autonomous behavior with an sensor detecting obacles and avoiding them.
The C-program is easy to understand and commented. also can be extended or modified. there are many many possibilities to expand this project.
Result is an amazing behaviour, which makes the impression of being really alive and somehow intelligent. It can start walking automatically and avoid obstacles with help of an ultrasonic sensor HC-SR04.
After plugging in the power supply, the Robobug gives a melody and waits for the start signal.
To start, press the button T1 on the locomotion controller board. The Robobug gets up on its feet and starts walking in a straight direction.
MEASURING:
The head turns frequently from left to right, so the ultrasonic sensor continuously measures the distance to all obstacles in a range of 60° (30° left and 30° right) and the RGB LED blinks in blue and green.
DETECT OBSTACLE WITH DISTANCE < 60CM:
The RGB LED turns red and the Robobug turns around until there is no other obstacle nearer than 90cm.
DETECT OBSTACLE WITH DISTANCE < 30CM:
The RGB LED turns red and the Robobug walks backwards (=escape behavior). After that, it turns around until there is no other obstacle nearer than 90cm.
C Program for Robobug avoiding obstaclesC/C++
C/C++/******************************************************************
Created with PROGRAMINO IDE for Arduino
Project : MAKERFACTORY Ultrasonic Demo (Snoopy Logic)
Author : UlliS
Description :
The demo shows how the MAKERFACTORY can avoid obstacles with
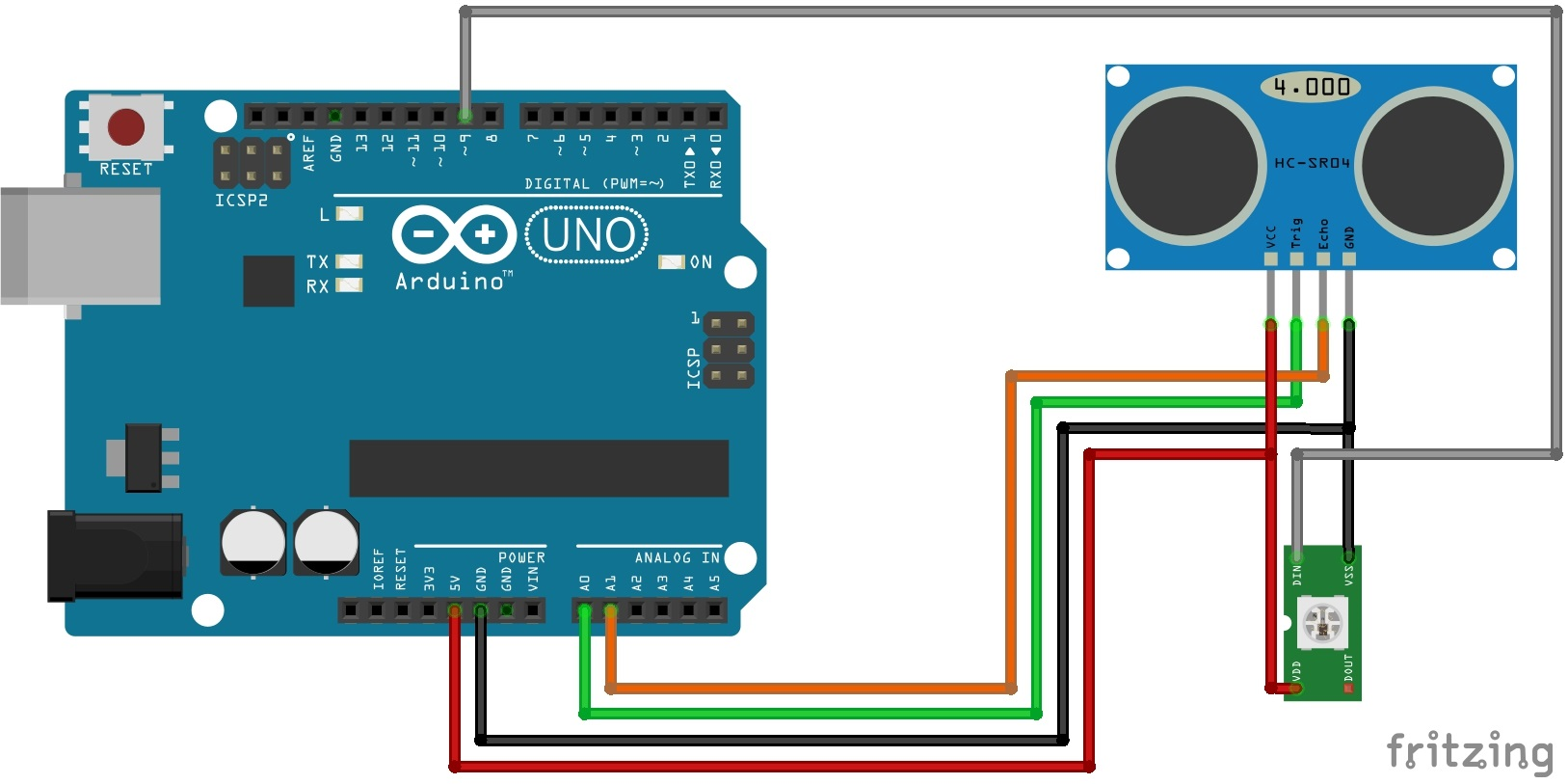
the Pan & Tilt unit and an ultrasonic sensor HC-SR04.
Userboard is ARDUINO UNO
---------------------------
- IR Daten 7
- SU1 6 Pan
- SU2 5 Tilt
- SU3 9 +/- WS2812
- A0 US Trigger
- A1 US Echo
- A4 free
- A5 free
- 10 free
******************************************************************/
#include <Adafruit_NeoPixel.h> // https://github.com/adafruit/Adafruit_NeoPixel
#ifdef __AVR__
#include <avr/power.h>
#endif
#include <Servo.h>
// Arduino
#define ARDUINO
#include <Hexapod_Lib.h>
/******************************************************************************
WS2812 RGB-LED
******************************************************************************/
// WS2812/13 (Neopixel) smart RGB LED
#define WS2812_PIN SU3
// Parameter 1 = number of pixels in strip
// Parameter 2 = Arduino pin number (most are valid)
// Parameter 3 = pixel type flags, add together as needed:
// NEO_KHZ800 800 KHz bitstream (most NeoPixel products w/WS2812 LEDs)
// NEO_KHZ400 400 KHz (classic 'v1' (not v2) FLORA pixels, WS2811 drivers)
// NEO_GRB Pixels are wired for GRB bitstream (most NeoPixel products)
// NEO_RGB Pixels are wired for RGB bitstream (v1 FLORA pixels, not v2)
// NEO_RGBW Pixels are wired for RGBW bitstream (NeoPixel RGBW products)
Adafruit_NeoPixel pixel = Adafruit_NeoPixel(1, WS2812_PIN, NEO_GRB + NEO_KHZ800);
/******************************************************************************
HC-SR04 ULTRASONIC SENSOR
******************************************************************************/
// pins for ultrasonic sensor
#define SR04_TRG_PIN A0
#define SR04_ECHO_PIN A1
/******************************************************************************
SERVO PAN & TILT
******************************************************************************/
// declare your servo as an object
#define SERVO_PAN_PIN SU2
#define SERVO_TILT_PIN SU1
Servo servo_pan;
Servo servo_tilt;
#define PAN_CENTER 100 // lower value scanner more left
#define TILT_CENTER 95 // lower value scanner more up
#define PAN_SCANDEG 30
#define PAN_LEFTMAX (PAN_CENTER - PAN_SCANDEG)
#define PAN_RIGHTMAX (PAN_CENTER + PAN_SCANDEG)
#define COLLISION_THRESH 60 // threshold for obstacles (in cm)
#define COLLISION_THRESH_FREE 30 // threshold for obstacles + cm
#define BASIC_DELAY 1500
#define MIN_RND_DELAY 500
#define MAX_RND_DELAY 2000
#define MOVE_SPEED 20
int pos = 0;
/******************************************************************************
SETUP
******************************************************************************/
void setup()
{
// WS2812 RGB-LED
pixel.begin(); // this initializes the NeoPixel library.
WS2812_SET_RGB(255,255,255);
// high-Z for the audio output
pinMode(PA_PIN,INPUT);
digitalWrite(PA_PIN,LOW);
// switches T1 and T2
pinMode(T1,INPUT);
pinMode(T2,INPUT);
// HC-SR04
pinMode(SR04_TRG_PIN, OUTPUT);
pinMode(SR04_ECHO_PIN, INPUT);
// open serial communications and wait for port to open:
Serial.begin(SERIAL_STD_BAUD);
while(!Serial);
// set the data rate for the SoftwareSerial port (User-Board to Locomotion-Controller)
SERIAL_CMD.begin(SERIAL_CMD_BAUD);
// reset the Locomotion-Controller
ROBOT_RESET();
delay(250);
ROBOT_RESET();
delay(150);
ROBOT_RESET();
// wait for Boot-Up
delay(1500);
ROBOT_INIT();
// pan & tilt servos
servo_pan.attach(SERVO_PAN_PIN);
servo_tilt.attach(SERVO_TILT_PIN);
servo_pan.write(PAN_CENTER);
servo_tilt.write(TILT_CENTER);
// rnd init
randomSeed(analogRead(0));
// RBG LED
for(int i = 0; i < 765; i++)
{
WS2812_ColorSweep(i);
delay(5);
}
WS2812_SET_RGB(0,255,0); // green
// print a hello world over the USB connection
Serial.println("> Hello here is the MAKERFACTORY Robobug");
}
/******************************************************************************
MAIN LOOP
******************************************************************************/
void loop()
{
// start demo
if(!digitalRead(T1))
{
delay(50);
if(!digitalRead(T1))
{
MSound(1, 100, 1000);
move_init();
// turn center to left (soft start up)
for (pos = PAN_CENTER; pos >= PAN_LEFTMAX; pos -= 1)
{
// in steps of 1 degree
servo_pan.write(pos);
delay(20);
}
while(1)
{
// forward
move_fwd(100);
// scanner turn to full right
for (pos = PAN_LEFTMAX; pos <= PAN_RIGHTMAX; pos += 1)
{
WS2812_SET_RGB(0,0,255); // blue
while (SR04_DISTANCE() < COLLISION_THRESH)
{
WS2812_SET_RGB(255,0,0); // red
if (pos <= PAN_CENTER) // obstacle left
{
// turn right
while (SR04_DISTANCE() < COLLISION_THRESH + COLLISION_THRESH_FREE)
{
checktonear(); // check min. distance
turn_right(BASIC_DELAY+random(MIN_RND_DELAY, MAX_RND_DELAY)); // rnd delay for better escape behavior
}
// forward
move_fwd(100);
}
else if (pos > PAN_CENTER) // obstacle right
{
// turn left
while (SR04_DISTANCE() < COLLISION_THRESH + COLLISION_THRESH_FREE)
{
checktonear(); // check min. distance
turn_left(BASIC_DELAY+random(MIN_RND_DELAY, MAX_RND_DELAY)); // rnd delay for better escape behavior
}
// forward
move_fwd(100);
}
}
// sweep servo
servo_pan.write(pos);
}
// forward
move_fwd(100);
// scanner turn to full left
for (pos = PAN_RIGHTMAX; pos >= PAN_LEFTMAX; pos -= 1)
{
WS2812_SET_RGB(0,255,0); // green
while (SR04_DISTANCE() < COLLISION_THRESH)
{
WS2812_SET_RGB(255,0,0); // red
if (pos <= PAN_CENTER) // obstacle left
{
// turn right
while (SR04_DISTANCE() < COLLISION_THRESH + COLLISION_THRESH_FREE)
{
checktonear(); // check min. distance
turn_right(BASIC_DELAY+random(MIN_RND_DELAY, MAX_RND_DELAY)); // rnd delay for better escape behavior
}
// forward
move_fwd(100);
}
else if (pos > PAN_CENTER) // obstacle right
{
// turn left
while (SR04_DISTANCE() < COLLISION_THRESH + COLLISION_THRESH_FREE)
{
checktonear(); // check min. distance
turn_left(BASIC_DELAY+random(MIN_RND_DELAY, MAX_RND_DELAY)); // rnd delay for better escape behavior
}
// forward
move_fwd(100);
}
}
// sweep servo
servo_pan.write(pos);
}
}
}
}
}
/******************************************************************************
MOVE
******************************************************************************/
void move_init()
{
// basic robot movement parameter
ROBOT_PWR_ON();
delay(1000);
ROBOT_SPEED(MOVE_SPEED);
ROBOT_HEIGHT(35);
}
void checktonear()
{
// min. distance, too close to the obstacle
if (SR04_DISTANCE()<COLLISION_THRESH_FREE) // backward, to near
{
move_bwd(BASIC_DELAY+random(MIN_RND_DELAY, MAX_RND_DELAY));
}
}
void move_fwd(int t)
{
// [lateral],[move],[turn]
// move = 0 -> max speed forward
//-----------------------
// lateral [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed left
// 255 = full speed right
//-----------------------
// move [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed forward
// 255 = full speed backward
//-----------------------
// turn [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed left
// 255 = full speed right
SendData(CMD_REG_WALK, 128, 0, 128, 0);
delay(t);
}
void move_bwd(int t)
{
// [lateral],[move],[turn]
// move = 255 -> max speed backward
//-----------------------
// lateral [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed left
// 255 = full speed right
//-----------------------
// move [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed forward
// 255 = full speed backward
//-----------------------
// turn [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed left
// 255 = full speed right
SendData(CMD_REG_WALK, 128, 255, 128, 0);
delay(t);
}
void turn_left(int t)
{
// [lateral],[move],[turn]
// turn = 0 -> max speed left
//-----------------------
// lateral [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed left
// 255 = full speed right
//-----------------------
// move [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed forward
// 255 = full speed backward
//-----------------------
// turn [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed left
// 255 = full speed right
ROBOT_TRANSLATE_MODE(128,128,60,128);
SendData(CMD_REG_WALK, 128, 128, 25, 0);
delay(t);
ROBOT_TRANSLATE_MODE(128,128,128,128);
}
void turn_right(int t)
{
// [lateral],[move],[turn]
// turn = 255 -> max speed right
//-----------------------
// lateral [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed left
// 255 = full speed right
//-----------------------
// move [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed forward
// 255 = full speed backward
//-----------------------
// turn [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed left
// 255 = full speed right
ROBOT_TRANSLATE_MODE(128,128,60,128);
SendData(CMD_REG_WALK, 128, 128, 230, 0);
delay(t);
ROBOT_TRANSLATE_MODE(128,128,128,128);
}
void stop_move(int t)
{
// [lateral],[move],[turn]
// all = 128 -> stop
//-----------------------
// lateral [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed left
// 255 = full speed right
//-----------------------
// move [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed forward
// 255 = full speed backward
//-----------------------
// turn [0 to 255]
//-----------------------
// 128 = stop
// 0 = full speed left
// 255 = full speed right
SendData(CMD_REG_WALK, 128, 128, 128, 0);
delay(t);
}
/******************************************************************************
HC-SR04 FUNCTIONS
******************************************************************************/
int SR04_DISTANCE()
{
long duration = 0;
int distance = 0;
// AVG value (2 samples)
for (int i = 0; i < 2; i++)
{
// Clears the trigPin
digitalWrite(SR04_TRG_PIN, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(SR04_TRG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(SR04_TRG_PIN, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(SR04_ECHO_PIN, HIGH);
// Calculating the avg distance
distance += duration*0.034/2;
delay(5);
}
return round(distance/2); // cm
}
/******************************************************************************
WS2812 RGB-LED FUNCTIONS
******************************************************************************/
void WS2812_ColorSweep(int i)
{
// WS2812 color change
// Farbwerte mit Vorbesetzung, begonnen wird mit rot
static int red = 255;
static int green = 0;
static int blue = 0;
if (i < 255) // Phase 1: von rot nach grn
{
red--; // red down
green++; // green up
blue = 0; // blue low
}
else if (i < 510) // Phase 2: von grn nach blau
{
red = 0; // red low
green--; // green down
blue++; // blue up
}
else if (i < 766) // Phase 3: von blau nach rot
{
red++; // red up
green = 0; // green low
blue--; // blue down
}
pixel.setPixelColor(0, pixel.Color(red, green, blue));
pixel.show();
}
void WS2812_SET_RGB(byte r, byte g, byte b)
{
// WS2812 color change
pixel.setPixelColor(0, pixel.Color(r, g, b));
pixel.show();
}



{kind=link}
Comments