Are you
tired of erasing the board every time you use it. Have you ever thought of
erasing the whole board while you are sitting in your place. The automatic
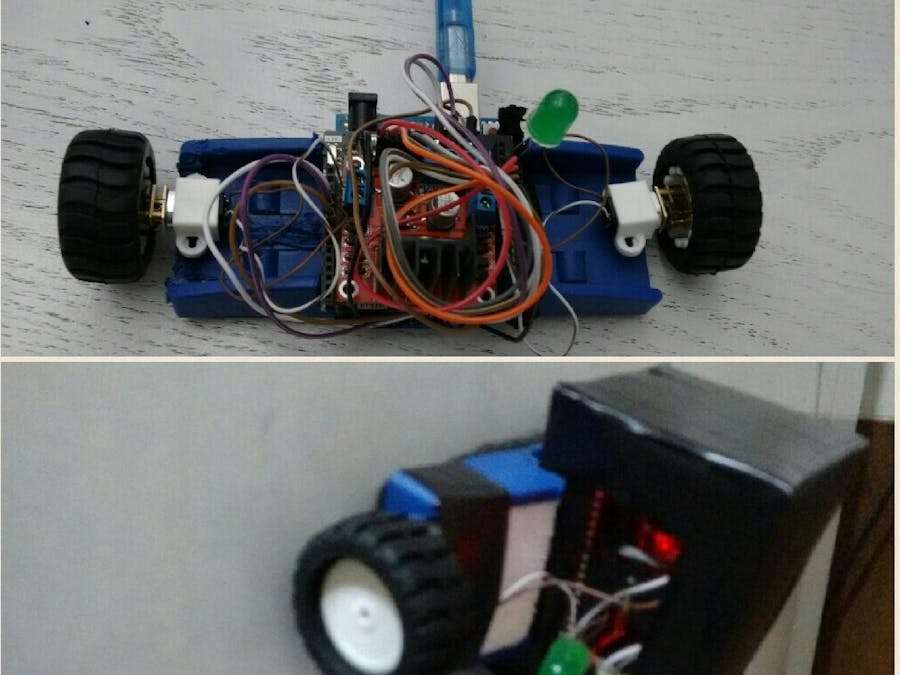
board eraser is a normal magnetic board eraser with motors and wheels that can
easily erase and clean your board using your mobile phone. Just leave it
mounted on the board and use it when you need to erase.
Why did i decide to make it ?
Most of the people nowadays use white boards in classes or meeting rooms. They write a lot and erase every time when they finish. There are some disadvantages from erasing the whole board physically with your hand, like wasting some time, doing effort, not professional in some meetings for important people to do it themselves and it the eraser makes your hands more dirty after using it. Moreover, some people find it hard to reach all the parts of the board especially when it is mounted on a high distance from the ground. As a result, I decided to build a small magnetic automated board eraser with wheels so i could control it easily from my mobile phone to erase the board from my place.
How Does it work?
After connecting all the hardware components and uploading the code to the arduino and 1sheeld start opening the 1sheeld mobile application and connect it to the 1sheeld board via Bluetooth. Then you have to select the shields that we will use; they are the game pad shield and accelerometer shield. Put the eraser on the board and open the game pad shield and start using the four arrow directions to move up, down, left or right. An LED will be high when the magnetic eraser moves on the board to start erasing words. Another way to control this eraser is to open the accelerometer shield and hold the phone in your hand. If you want to move up tilt your hand in the front direction to make the Y < -5, so the eraser will move up. If you want to move down tilt your hand in the backward direction to make the Y < 6, so the eraser will move down. Furthermore, if you want to move right tilt your hand in the right direction to make the x < -6, so the eraser will move in the right direction and finally If you want to move left tilt your hand in the left direction to make the x > 6, so the eraser will move in the left direction. Now your board will be easily controlled to erase the whole board without doing any effort.
Images of hardware Components
Magnetic Board Eraser
Micro metal DC motors and wheels
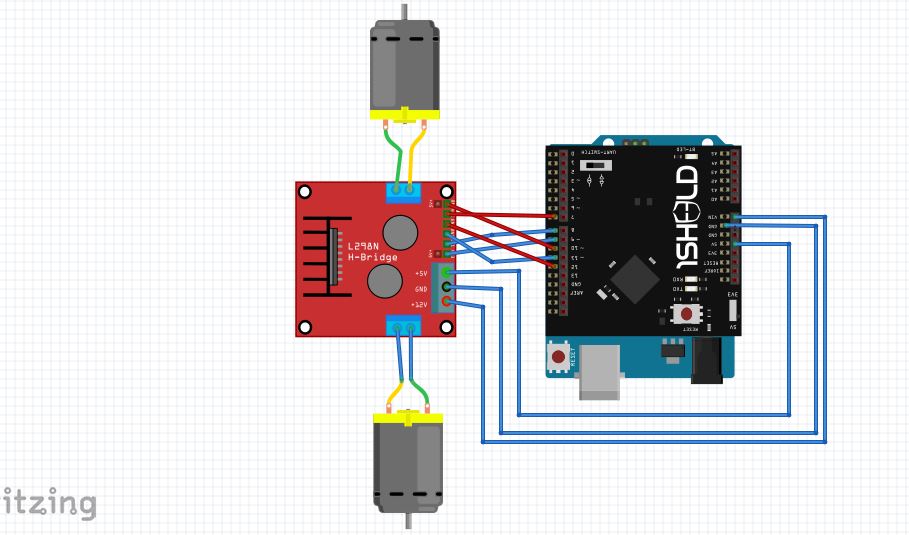
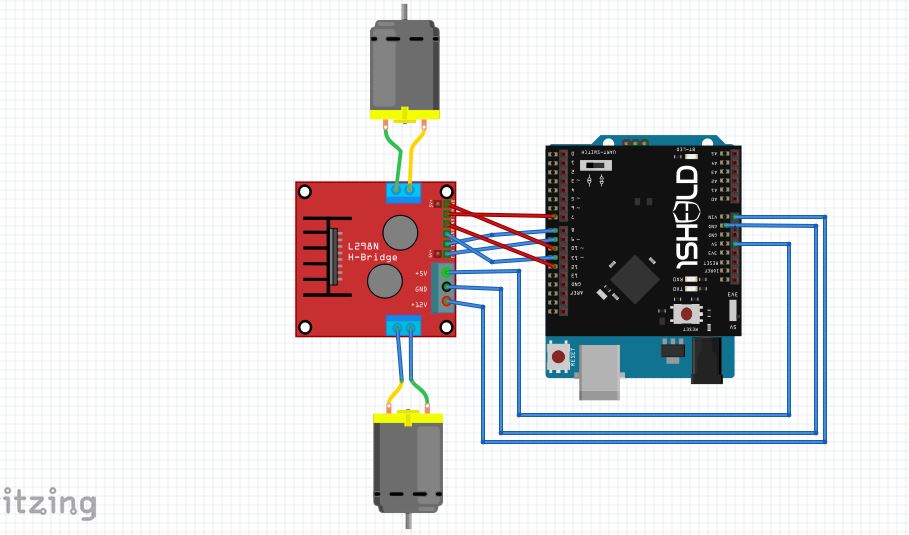
Motor Driver L289n
Motors connected to motor driver
1sheeld Board
Gloves used to control the board eraser using mobile accelerometer
This is the code for the board eraser to be controlled either by a game pad shield or by the mobile accelerometer sensor values to move in all directions and erase the board. A LED is used to give a clear sign for user that it is erasing now.
#define CUSTOM_SETTINGS#define INCLUDE_GAMEPAD_SHIELD#define INCLUDE_LED_SHIELD#define INCLUDE_ACCELEROMETER_SENSOR_SHIELDfloatx,y,z;/* Include 1Sheeld library. */#include <OneSheeld.h>/* A name for the LED on pin 7. */constintledPin=13;/* Pin configuration of the Seeedstudio's motor shield. */intmotorAPin1=8;intmotorAPin2=11;intmotorBPin1=12;intmotorBPin2=7;intmotorASpeedPin=9;intmotorBSpeedPin=10;voidsetup(){/* Start communication. */OneSheeld.begin();/* Set the LED pin as output. */pinMode(ledPin,OUTPUT);/* Seeedstudio's motor shield initialization. */pinMode(motorAPin1,OUTPUT);// IN1 of motor ApinMode(motorAPin2,OUTPUT);// IN2 of motor ApinMode(motorBPin1,OUTPUT);// IN3 of motor BpinMode(motorBPin2,OUTPUT);// IN4 of motor BpinMode(motorASpeedPin,OUTPUT);// Speed of motor ApinMode(motorBSpeedPin,OUTPUT);// Speed of Motor B}voidloop(){x=AccelerometerSensor.getX();y=AccelerometerSensor.getY();z=AccelerometerSensor.getZ();/* If up is pressed, move the car forward. */if(GamePad.isUpPressed()||y<-5){analogWrite(motorASpeedPin,255);analogWrite(motorBSpeedPin,255);digitalWrite(motorAPin1,LOW);digitalWrite(motorAPin2,HIGH);digitalWrite(motorBPin1,LOW);digitalWrite(motorBPin2,HIGH);digitalWrite(ledPin,HIGH);}/* If down is pressed, move the car backwards. */elseif(GamePad.isDownPressed()||y>6){analogWrite(motorASpeedPin,255);analogWrite(motorBSpeedPin,255);digitalWrite(motorAPin1,HIGH);digitalWrite(motorAPin2,LOW);digitalWrite(motorBPin1,HIGH);digitalWrite(motorBPin2,LOW);digitalWrite(ledPin,HIGH);}/* If right is pressed, turn the car to the right. */elseif(GamePad.isRightPressed()||x<-6){analogWrite(motorASpeedPin,255);analogWrite(motorBSpeedPin,255);digitalWrite(motorAPin1,LOW);digitalWrite(motorAPin2,HIGH);digitalWrite(motorBPin1,HIGH);digitalWrite(motorBPin2,LOW);digitalWrite(ledPin,HIGH);}/* If left is pressed, turn the car to the left. */elseif(GamePad.isLeftPressed()||x>6){analogWrite(motorASpeedPin,255);analogWrite(motorBSpeedPin,255);digitalWrite(motorAPin1,HIGH);digitalWrite(motorAPin2,LOW);digitalWrite(motorBPin1,LOW);digitalWrite(motorBPin2,HIGH);digitalWrite(ledPin,HIGH);}/* If nothing is pressed stop all motors. */else{analogWrite(motorASpeedPin,0);analogWrite(motorBSpeedPin,0);digitalWrite(ledPin,LOW);}}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)






{kind=link}
Comments