I had to rehabilitate after disc surgery, but it was useless when the belly fat is intact. My doctor friend said that cycling is good for diet. So I decided to ride a bicycle; however, I thought it was not yet appropriate and I bought an indoor bicycle as an alternative.
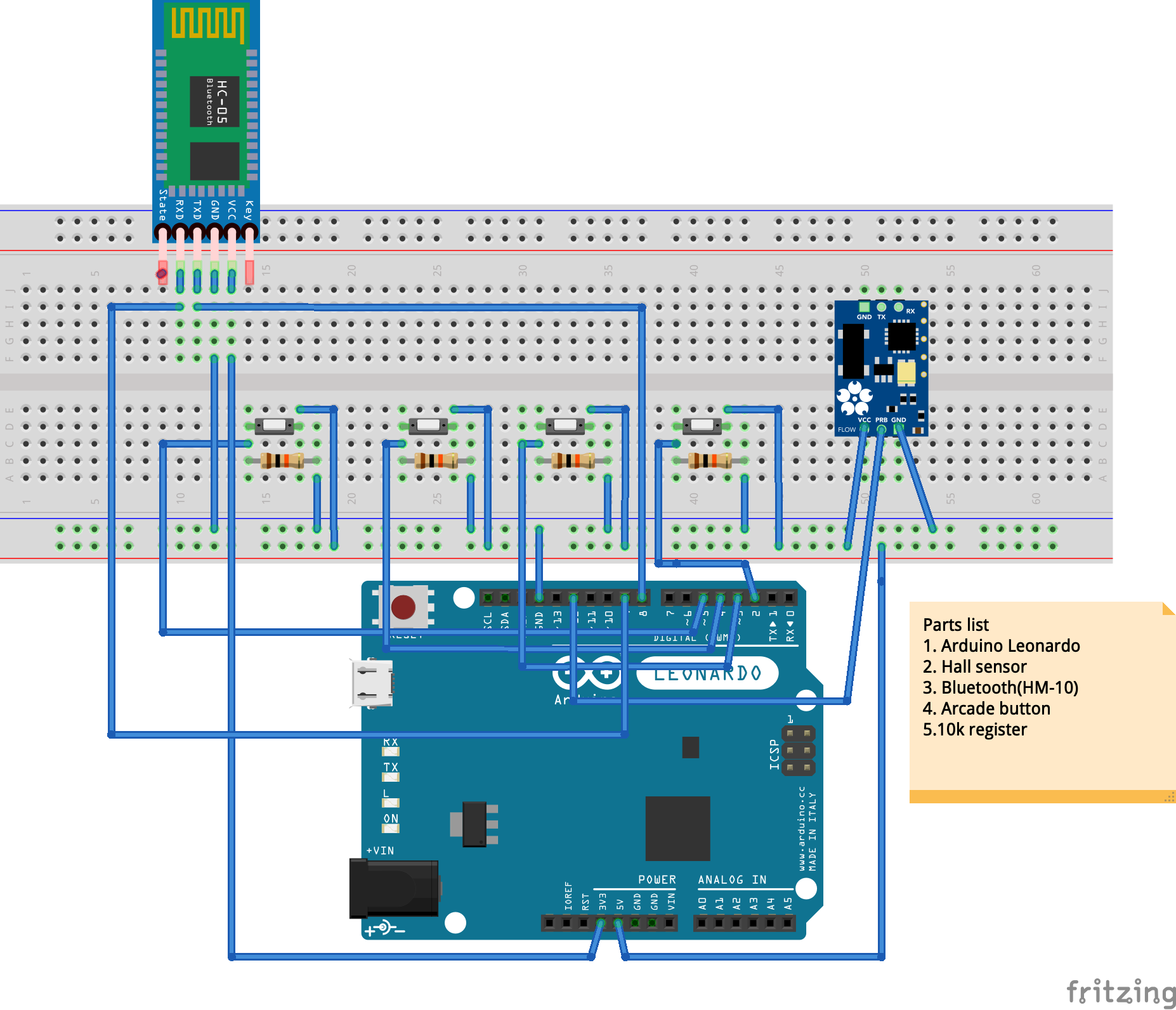
Indoor cycling is good for health but it is not fun! As a result, I decided to make it fun! My project uses an Arduino Leonardo and Hall sensor as the main equipment. Use the Hall sensor to detect the rotation of the bicycle, along with the Unity3D racing game starter kit.
/* Bike racing board for Bluetooth created 2 May 2019 modified 10 May 2019 by Steve Kim This example code is in the public domain.*/#include<SoftwareSerial.h>//#define DEBUG 1//Bluetooth send constants#define ACCEL "w"#define STEER_LEFT "a"#define STEER_RIGHT "d"#define NITRO "n"#define PAUSE "q"#define ENTER "e"#define RPM_LIMIT_COUNT 50SoftwareSerialhm10(8,9);//RX, TX connection // set pin numbers for the five buttons:constintupButton=12;//bicycle hall sensorconstintdownButton=11;//not usedconstintleftButton=4;constintrightButton=5;constintenterButton=2;constintescButton=3;constintledPin=13;//Speed variableintrotate_count_thresh=2;//Hall sensor sensitivityboolhall_sensor_contacted=false;introtate_count=0;//Duration measurement variablesfloatstart_time;floatend_time;floaton_time;floatoff_time;floatpassed_time;//Button StateboolleftButtonState=false;boolrightButtonState=false;boolenterButtonState=false;boolescButtonState=false;boolboostKeyState=false;voiddebug_serial_print(constchar*str){#ifdef DEBUGSerial.print(str);#endif}voiddebug_serial_println(constchar*str){#ifdef DEBUGSerial.println(str);;#endif}voidsetup(){// initialize the buttons' inputs:pinMode(upButton,INPUT);pinMode(downButton,INPUT);pinMode(leftButton,INPUT);pinMode(rightButton,INPUT);pinMode(enterButton,INPUT);pinMode(escButton,INPUT);pinMode(ledPin,OUTPUT);Serial.begin(115200);hm10.begin(9600);}voidloop(){rotate_count=0;hall_sensor_contacted=false;start_time=micros();on_time=micros();while(true){//Button input processing///////////// Left Button //////////////////////////////////////////////////////if(digitalRead(leftButton)==HIGH&&leftButtonState==false){//left button onif(digitalRead(rightButton)==LOW&&rightButtonState==false){//left only on//Keyboard.press(key_left);hm10.write(STEER_LEFT);debug_serial_println("key_left pressed.");leftButtonState=true;}}elseif(digitalRead(leftButton)==LOW&&leftButtonState==true){//left button off//Keyboard.release(key_left);debug_serial_println("key_left released.");leftButtonState=false;boostKeyState=false;}///////////// Right Button //////////////////////////////////////////////////////if(digitalRead(rightButton)==HIGH&&rightButtonState==false){//right button onif(digitalRead(leftButton)==LOW&&leftButtonState==false){//right only on//Keyboard.press(key_right);hm10.write(STEER_RIGHT);debug_serial_println("key_right pressed.");rightButtonState=true;}}elseif(digitalRead(rightButton)==LOW&&rightButtonState==true){//right button off//Keyboard.release(key_right);debug_serial_println("key_right released.");rightButtonState=false;boostKeyState=false;}///////////// Left & Right On together => Boost /////////////////////////////////////if(digitalRead(leftButton)==HIGH&&digitalRead(rightButton)==HIGH&&boostKeyState==false){//Keyboard.press(key_boost);hm10.write(NITRO);debug_serial_println("key_boost pressed.");leftButtonState=true;rightButtonState=true;boostKeyState=true;}///////////// Enter Button //////////////////////////////////////////////////////if(digitalRead(enterButton)==HIGH&&enterButtonState==false){//enter button on//Keyboard.press(key_enter);hm10.write(ENTER);debug_serial_println("key_enter pressed.");enterButtonState=true;}elseif(digitalRead(enterButton)==LOW&&enterButtonState==true){//enter button off//Keyboard.release(key_enter);debug_serial_println("key_enter released.");enterButtonState=false;}///////////// Esc Button //////////////////////////////////////////////////////if(digitalRead(escButton)==HIGH&&escButtonState==false){//esc button on//Keyboard.press(key_esc);hm10.write(PAUSE);debug_serial_println("key_esc pressed.");escButtonState=true;}elseif(digitalRead(escButton)==LOW&&escButtonState==true){//esc button off//Keyboard.release(key_esc);debug_serial_println("key_esc released.");escButtonState=false;}///////////// Bicycle Sensor Input //////////////////////////////////////////////////////if(digitalRead(upButton)==LOW){//sensor onif(hall_sensor_contacted==false){debug_serial_println("hall_sensor_contacted 1");hall_sensor_contacted=true;rotate_count+=1;on_time=micros();}}else{hall_sensor_contacted=false;off_time=micros();passed_time=(off_time-on_time)/1000000.0;if(passed_time>=1){//when rotation stopped//debug_serial_println("break 1");break;}}if(rotate_count>=rotate_count_thresh){//debug_serial_println("break 2");break;}}end_time=micros();passed_time=(end_time-start_time)/1000000.0;floatrpm_val=(rotate_count/passed_time)*60.0;// Serial.print("Time Passed: ");// Serial.print(passed_time);// debug_serial_println("s");// Serial.print(rpm_val);// debug_serial_println(" RPM");delay(1);// delay in between reads for stabilityif(rpm_val>=RPM_LIMIT_COUNT){//Keyboard.press(key_up);hm10.write(ACCEL);debug_serial_println("key_up press");}else{//Keyboard.releaseAll(); //debug_serial_println("key release All");}}


















{kind=link}
Comments