


Hardware components | ||||||
_xcg7vos8ax_LjVH1Q6mKB.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
A PoE (Power over Ethernet) web module is a device that uses a technology that enables both power supply and data transmission through an Ethernet cable. This technology is commonly used in network devices or IP cameras.
A PoE web module is an internet connectivity device that can be easily controlled remotely using only one Ethernet cable. By using this module, there is no need for additional power cables, which can reduce maintenance or installation costs for existing systems.
A PoE web module typically supports web applications such as web servers, databases, CGI scripts, etc. Users can view web pages through a browser on the network and control the module through the web page.
PoE web modules can be used in various industrial and household applications and provide high reliability and stability. Additionally, this module usually supports multiple protocols, making it highly compatible with existing systems.
DevelopmentMore information can be found at the link below.
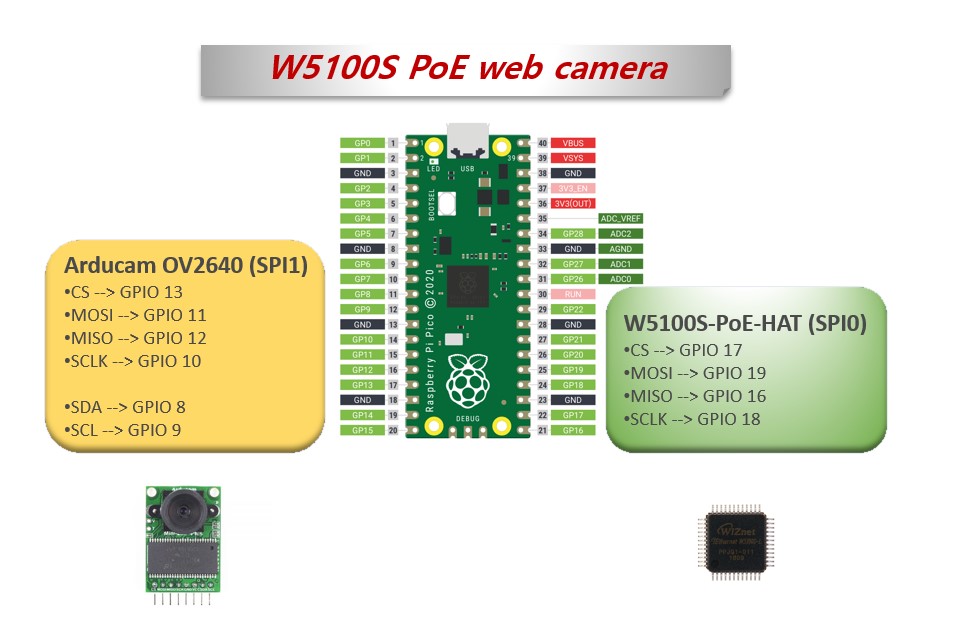
- Raspberry Pi Pico
https://www.raspberrypi.com/products/raspberry-pi-pico/
- Arducam OV2640
https://www.arducam.com/product/arducam-2mp-spi-camera-b0067-arduino/
- Connect to pins
Installing CircuitPython
Install CircuitPython on Raspberry Pi Pico by referring to the link above.
https://learn.adafruit.com/getting-started-with-raspberry-pi-pico-circuitpython/circuitpython
- Download the below uf2 file link on your computer
CircuitPython 7.0.0 - https://downloads.circuitpython.org/bin/raspberry_pi_pico/en_US/adafruit-circuitpython-raspberry_pi_pico-en_US-7.0.0.uf2
Setup Library
Copy into the lib folder inside the Raspberry Pi Pico. Download Bundle from the link below and place it in the lib folder inside the "CIRCUITPY" file.
https://circuitpython.org/libraries
connect the your board to the internet router using ethernet cable. A few minutes after.
Press "Ctrl+D" on the terminal window. you can see the messages as follows.
Conversely, pressing "Ctrl+C" causes the running source to stop.
- Open a web browser and enter the IP address of the module.
This is the executable image. Have a nice day.
A PoE (Power over Ethernet) web module is a device that can be used in network devices or IP cameras and can transmit both power and data simultaneously through an Ethernet cable.
This module is commonly used in industrial and household applications, such as building management systems, security systems, and CCTV. Additionally, it is used in various industrial fields, such as manufacturing processes, energy management, vehicle control, and robot control.
Since a PoE web module does not require a power cable, it can be conveniently added to existing network devices such as wireless APs and VoIP phones. Furthermore, this module supports web applications such as web servers, databases, CGI scripts, etc., allowing users to control the module through a web page.




{kind=link}
Comments