IntroductionThis entire project is built as part of another work project trying to learn Pycom SiPy and Sigfox. I used the ADXL345 accelerometer to detect different movements like a knock on a door or the movement of a piston. The system is built with the potential of using a powerbank or other battery to power the system and make it independent from main or other wiring.
Getting startedI suggest looking into this guide, https://www.hackster.io/bucknalla/sending-a-sigfox-message-with-micropython-52b2a1, to learn the basics of how to use the Pycom SiPy. The biggest job in this project was to write the driver for the ADXL345. The entire code is placed in the code section. It should be commented fairly well (tried to make it explanatory).
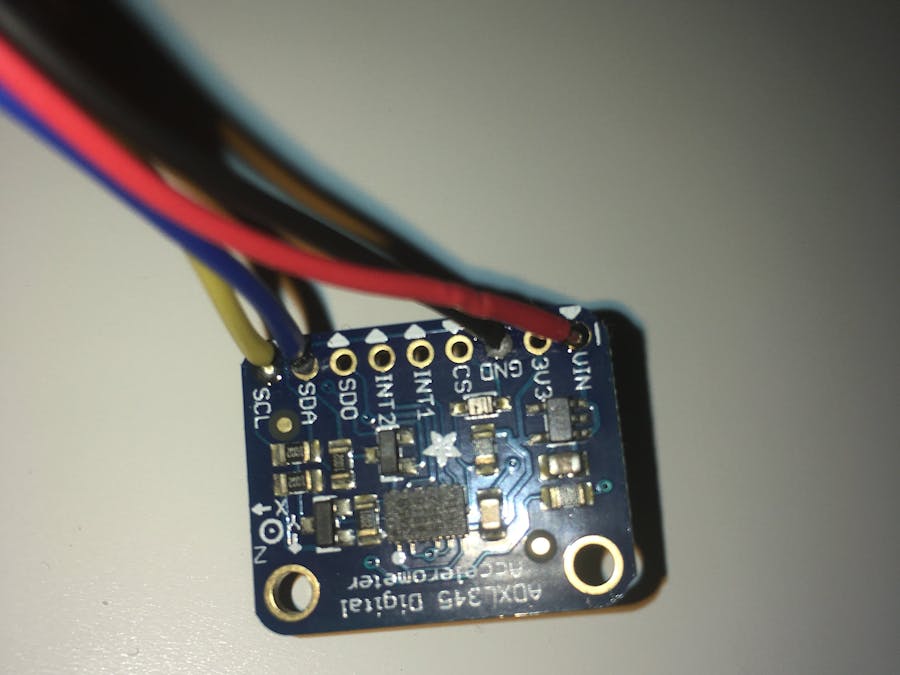
I use the Pycom SiPy with the expansion board. The connections/schematics are as follows (I chose to also write down the color of the wires used):
- SCL —> P10 / G17 (yellow)








Comments