



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
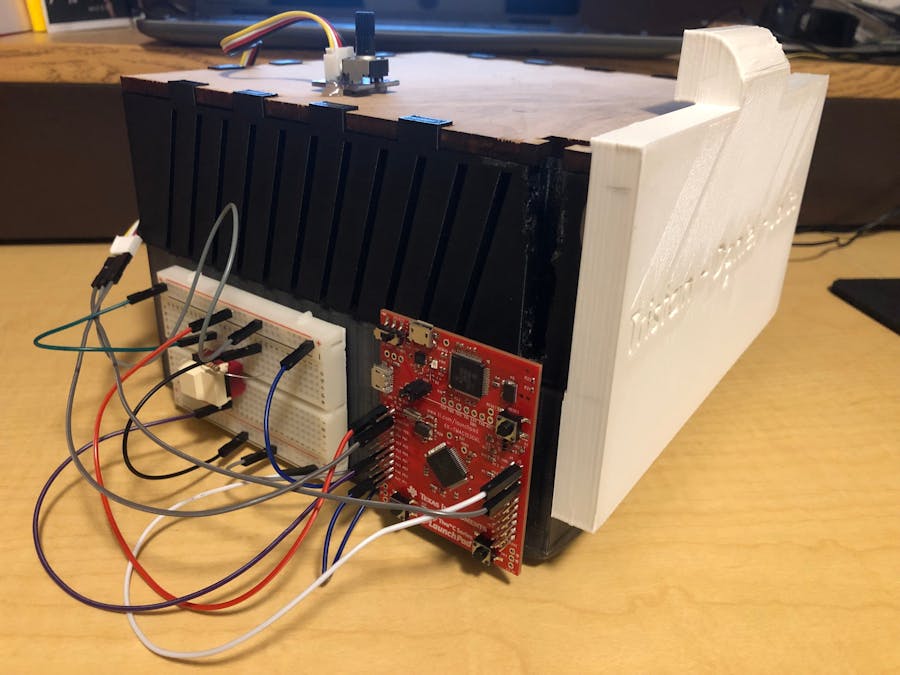
The phone cage was conceived to combat phone addiction, thereby increasing a user's productivity by decreasing the amount of time wasted on a cell phone, as it would be locked away. The chassis of the cage was drafted bearing in mind various factors, such as ease of removing the lid, putting the lid in place, and aesthetic value.
Much of the version on display was 3D printed, but it includes a plywood top, as well as an acrylic platform at the bottom of the phone compartment, so the user gets to see the inner workings of the phone cage. However, the entire cage can be 3D printed with the files on this page.
The cage works by linking together a potentiometer for setting the phone's jail time, a microservo motor to engage and disengage the lock, and the components are integrated with Energia code, a Launch Pad, a breadboard, and jumper wires.
Once the motor engages, it rotates 90 degrees in one direction and pushes a pin attached to its propeller via a paper clip into two holes in the cage body and cover, preventing the cover from opening.
Once the time specified by the potentiometer runs out, the motor rotates 90 degrees in the other direction, pulling the pin out of the holes and allowing the cover to be removed.
To set it up, we first printed out all of the materials needed for the cage itself. That includes the cage body, cover, and top. The pin used for the lock was also 3D printed.
Once we had all the pieces, we attached a breadboard and microcontroller to the side of the body and a potentiometer to the top. The servo motor goes inside the body on a raised platform in the corner. When setting it in place, one must be sure its rotary portion lines up horizontally with the hole in the front of the body, as this is the hole the motor will have to push the pin through.
We recommend attaching the pin to the motor with a paper clip, as it can be threaded through the hole in the pin in a way that is loose enough to allow the clip to rotate as the motor does. That motion is needed for the motor to push the pin through holes, since the motor moves in a circle, while the pin must move in a straight line. The paper clip is a nice buffer between these two.
Once everything is wired up, the cage body also includes a hole in the side that you can thread the wires leading to the the motor to.
And when it comes time to use it, Energia's serial monitor displays a count-down for reference if you would like to see how long before you can get to your phone again.





{kind=link}
Comments