I like plants, I like to be eco-friendly, love electronics, but how can I fit those things together? enters the Smart Modular Watering System.
By using the SparkFun ESP8266 Blynk Board with the Blynk app you can build a system that monitors the level of the water reservoir and will water your plants automatically at the right moment.
It will help you save water!
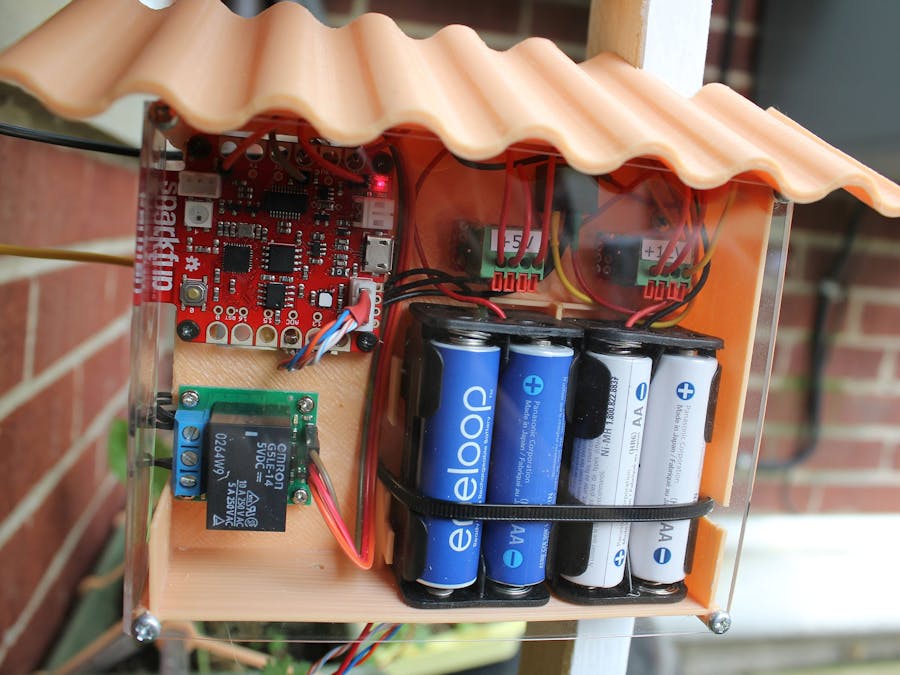
1 / 10 • Smart Modular Watering System using Blynk
Data collected from sensors is used to decide when is the right time to water the plants, to send alerts when the water reservoir is low and more:
- Soil moisture sensor: accurately measures the actual soil moisture.
- An ultrasonic distance sensor can be used to measure the level of the water reservoir with good reliability.
- UV sensor: UV index data may help you decide whether your plant requires more shadow or direct sunlight.
- Temperature and humidity sensors can also help deciding about critical conditions for your plants.
Operation - The Blynk AppThe Blynk app can be used to monitor in real time the data collected by the sensors:
- Read the actual water level.
Water reservoir level: red bar indicates how empty¹ is.
Soil moisture. Green bar indicates the water content of the soil.
Temperature and humidity.
- Check the status of the irrigation system (On/Off) - H2O Led.
1 / 2 • Irrigation system is Off.
Some parameters of the system can be modified using the Blynk app too:
- Water level threshold: if the water level is above² this number, the app will send a warning.
Water level threshold (in centimeters)
- Soil moisture threshold: the system will turn On the irrigation system if the soil moisture is below this number.
- Watering interval (in hours): how often the system will irrigate -if conditions require it-.
Watering interval (in hours)
- Watering time (in seconds): duration of the irrigation when activated.
Watering time (in seconds)
¹ ² Please note that the water level sensor measures the distance between the top of the container and the surface of the water. So a higher number means a lower water level.
Make it Modular, Make it Smarter!The Smart Modular Watering System has a very simple implementation, but there is lot of room for improvement. Some other features can be added to the Smart Modular Watering System with some more work, these are just a few examples:
- The UV sensor data can also be used to decide at what times of the day to stop watering. Maybe stop watering at night?
- The data collected can be analyzed to predict the water usage. e.g.: How much water your plants will need before your next trip.
- Add a solar panel, charge your batteries with it, and show the world that you care about the Environment!.
AssemblyFirst of all you will need to solder some parts:
- UV sensor: The UV sensor I used is available only as SMD package. So I made a breakout board. Currently, this component is used only to graph the UV index information in the Blynk app.
- Ultrasonic distance sensor: I used an ATiny45 microcontroller which interfaces the distance sensor and the Blynk board. It will deliver the data via I2C when requested by the I2C master (Blynk board).
- I recommend to waterproof the circuit boards that will be exposed to the elements with some Epoxy.
The ATtiny45 module is optional, the Ultrasonic distance sensor readings can be handled directly in the Blynk board by using some digital pins and by tweaking the main program.
Once the soldering job is complete, all the modules can be assembled together following the main schematic of the project.
- The Blynk board, HC-SR04 and Relay module need to be powered with +5V, In my case, I needed a DC/DC converter.
- A relay module is needed to Power On/Off the water pump of the irrigation system.
- To present the project I used AA batteries but I recommend using a DC power supply that matches the voltage of the Water pump. 12V in this case.
- Finally, setup the Blynk app by scanning the QR code, or by creating the widgets based on the Virtual pins -images in the gallery below-.
The 3D printed parts used in this project are optional. Hardware store or custom made pars can be used depending on your needs.
For more InformationFor more information visit the Smart Modular Watering System on Github
Enjoy!













_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
Comments