from machine import Pin, time_pulse_us
import utime
# ── Pin Setup ──────────────────────────────────────
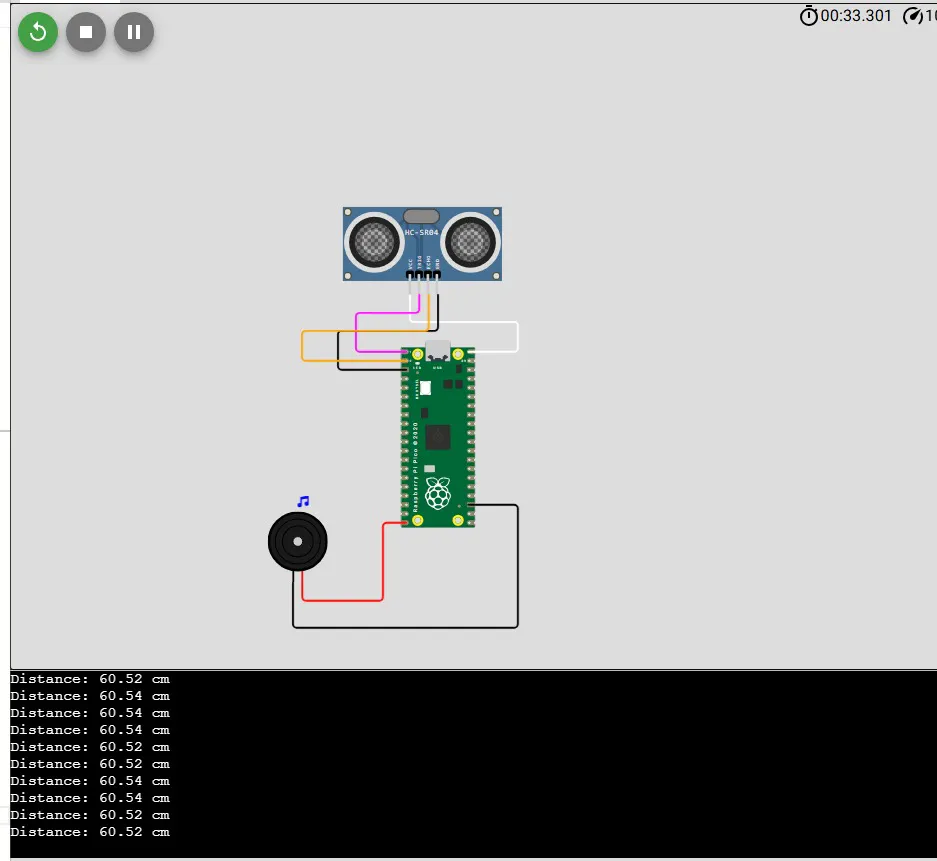
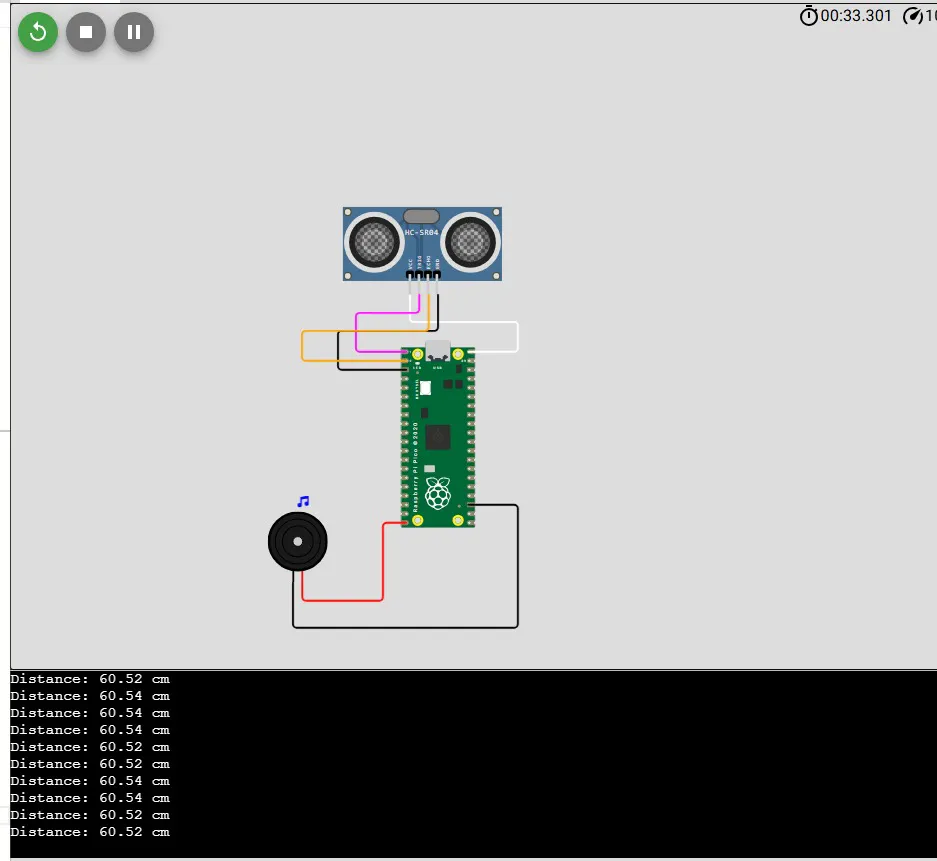
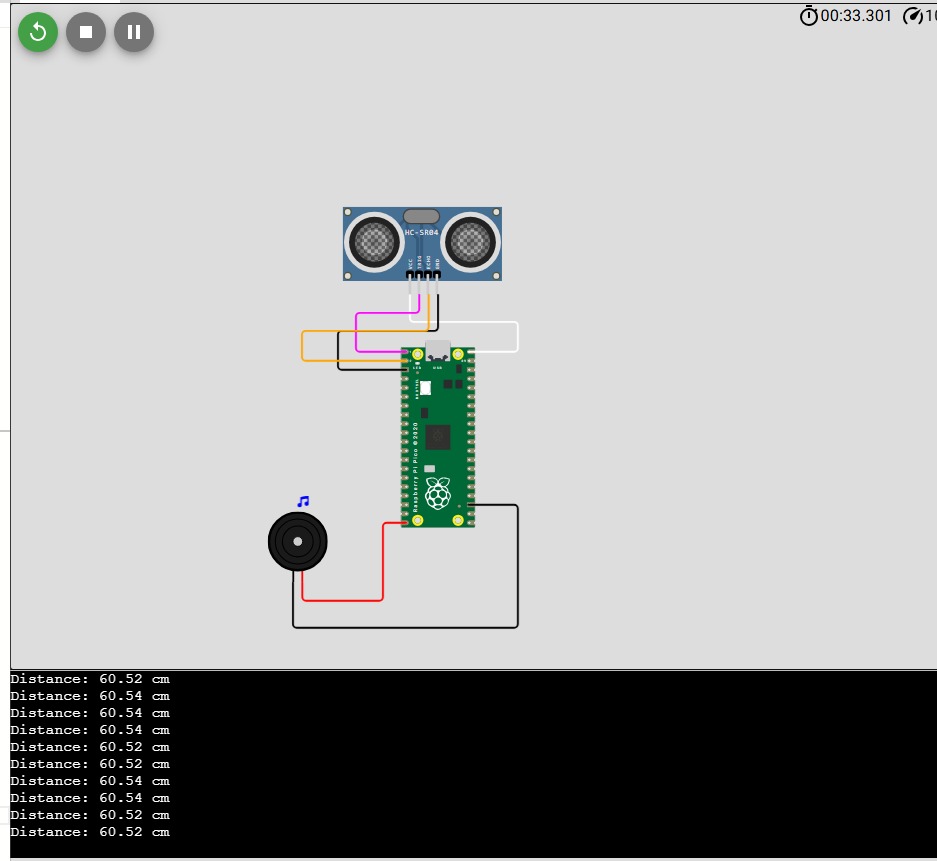
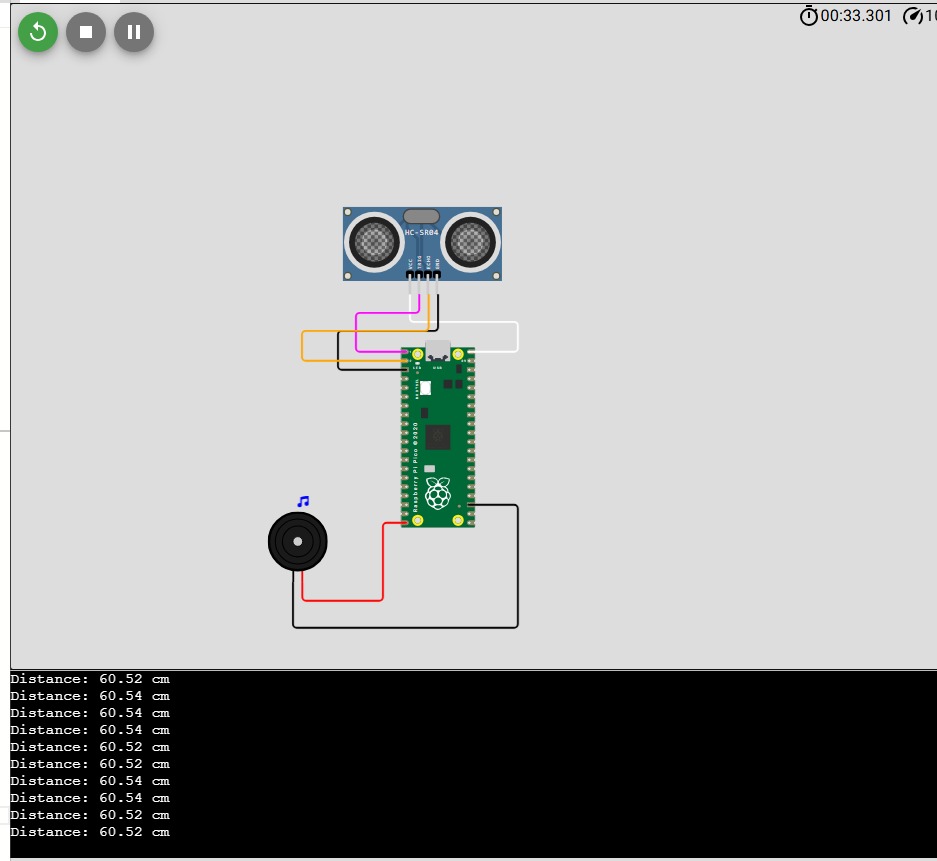
TRIG = Pin(0, Pin.OUT) # Ultrasonic Trigger → GP0
ECHO = Pin(1, Pin.IN) # Ultrasonic Echo → GP1
BUZZ = Pin(15, Pin.OUT) # Buzzer Positive → GP15
# ── Distance Thresholds (in cm) ────────────────────
DANGER_DIST = 30 # Very close → fast beep
WARNING_DIST = 80 # Medium close → slow beep
# ── Get Distance Function ──────────────────────────
def get_distance():
TRIG.low()
utime.sleep_us(2)
TRIG.high()
utime.sleep_us(10)
TRIG.low()
duration = time_pulse_us(ECHO, 1, 30000)
if duration < 0:
return None
distance = (duration * 0.0343) / 2
return round(distance, 2)
# ── Buzzer Beep Function ───────────────────────────
def beep(on_time, off_time):
BUZZ.high()
utime.sleep_ms(on_time)
BUZZ.low()
utime.sleep_ms(off_time)
# ── Main Loop ──────────────────────────────────────
print("Blind Stick Started...")
while True:
dist = get_distance()
if dist is None:
print("No object detected")
BUZZ.low()
utime.sleep_ms(200)
else:
print("Distance:", dist, "cm")
if dist <= DANGER_DIST:
beep(on_time=100, off_time=100)
elif dist <= WARNING_DIST:
beep(on_time=200, off_time=500)
else:
BUZZ.low()
utime.sleep_ms(200)















{kind=link}
{kind=link}
Comments