



Hardware components | ||||||
 |
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Why:
Conclusion:
Read moreI wanted a robot which could do line tracking, avoidance with HC-SR04 and be commanded with an IR remote control. I started to think about the program (I already did the robot before). The program is long and heavy.
Wich components:I bought the Elegoo Car Kit V3 which is well made and easy to do. If you want to get it:
https://www.amazon.com/ELEGOO-Tracking-Ultrasonic-Intelligent-Educational/dp/B07KPZ8RSZ
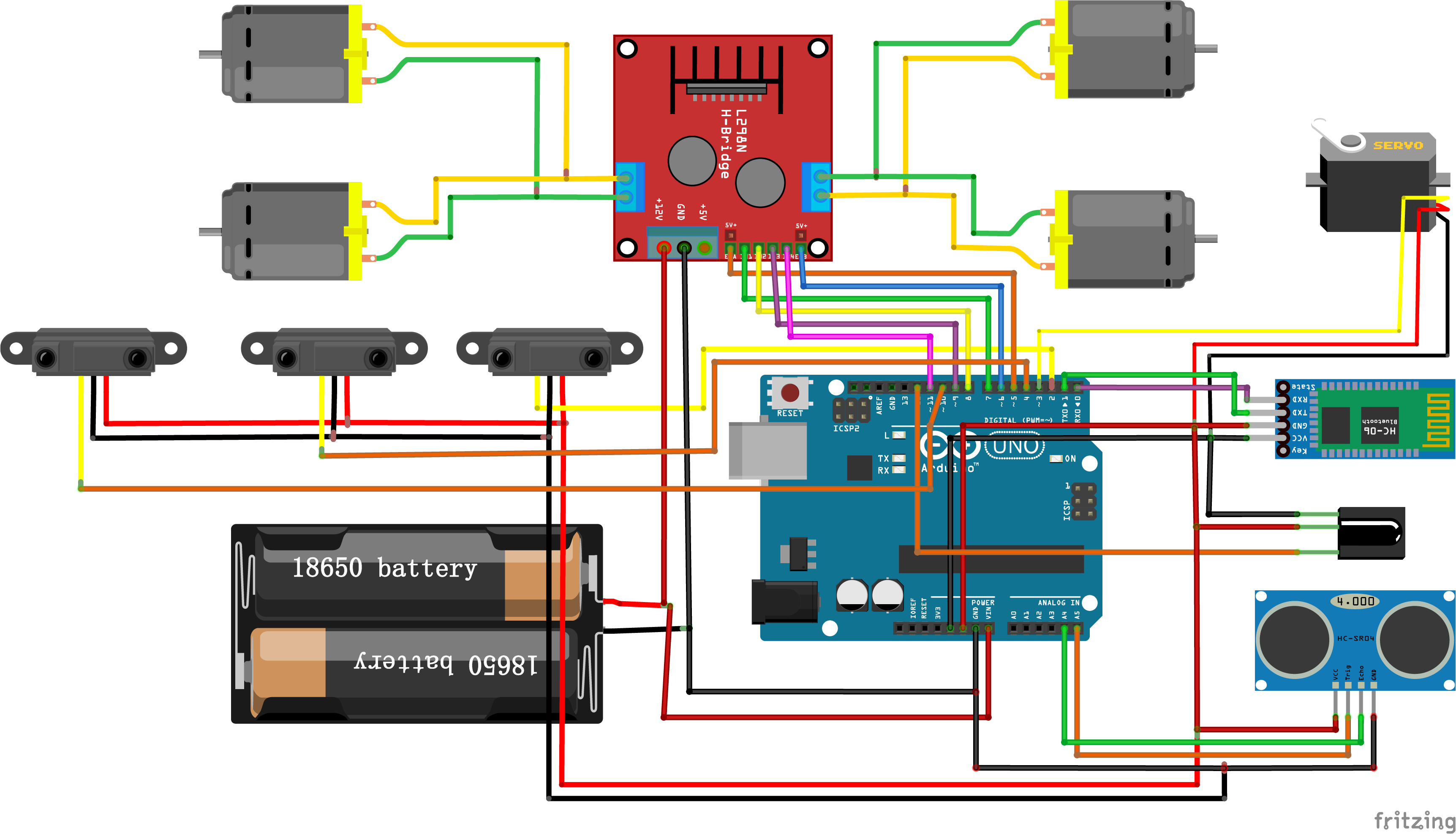
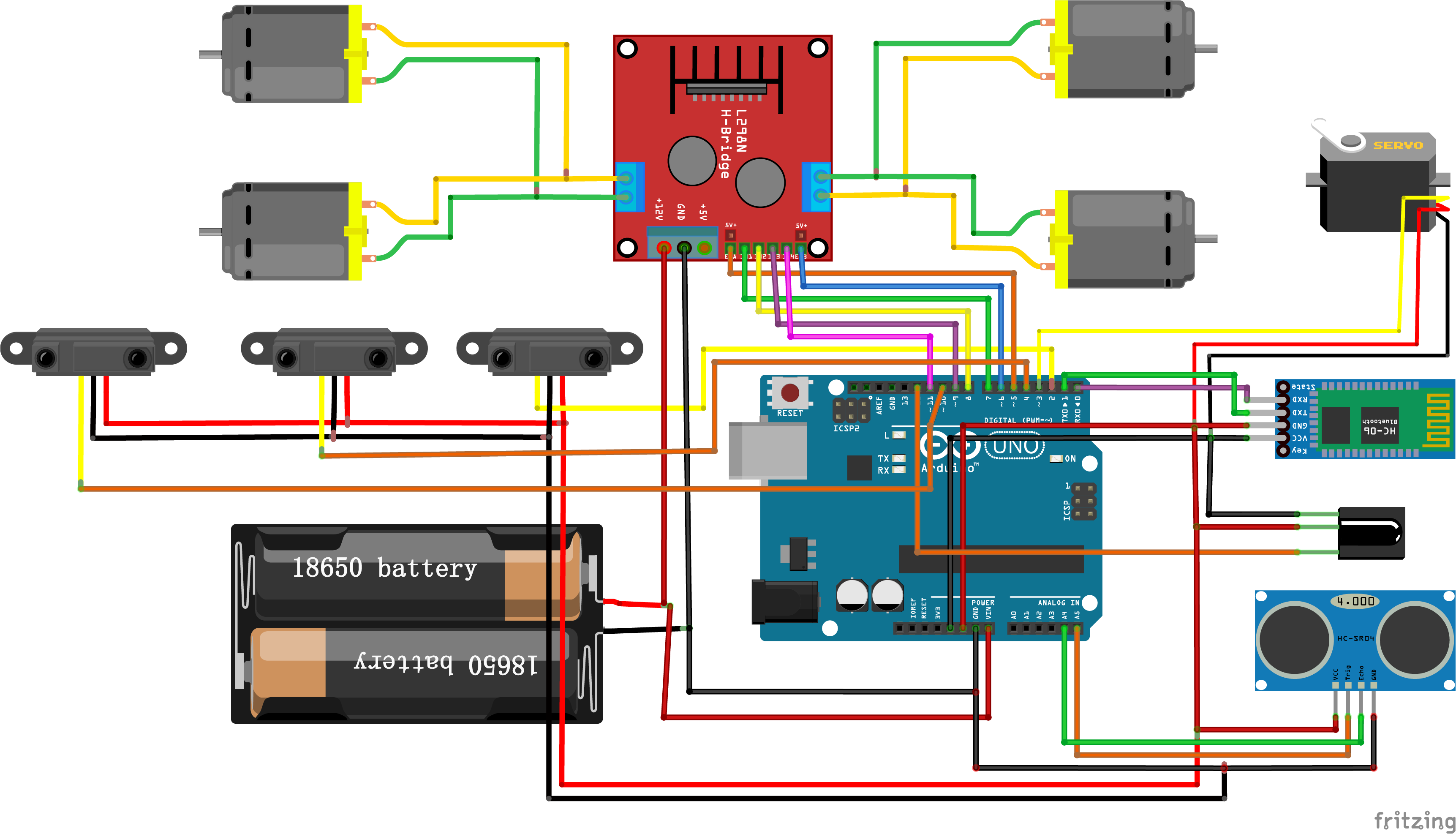
How does it work:The arduino card is a REV3 which is connected to a shield which connects to all the other components.
1 / 2 • the commander shield
It's funny and well made!!!
If you want more infos, tell me in the comments!
{kind=link}
#include <IRremote.h>
#include <Servo.h>
#include <stdio.h>
#include "HardwareSerial.h"
#include "ArduinoJson-v6.11.1.h" //Use ArduinoJson Libraries
#define f 16736925 // FORWARD
#define b 16754775 // BACK
#define l 16720605 // LEFT
#define r 16761405 // RIGHT
#define s 16712445 // STOP
#define KEY1 16738455 //Line Teacking mode
#define KEY2 16750695 //Obstacles Avoidance mode
#define KEY_STAR 16728765
#define KEY_HASH 16732845
/*Arduino pin is connected to the IR Receiver*/
#define RECV_PIN 12
/*Arduino pin is connected to the Ultrasonic sensor module*/
#define ECHO_PIN A4
#define TRIG_PIN A5
/*Arduino pin is connected to the Motor drive module*/
#define ENA 5
#define ENB 6
#define IN1 7
#define IN2 8
#define IN3 9
#define IN4 11
#define LED_Pin 13
/*Arduino pin is connected to the IR tracking module*/
#define LineTeacking_Pin_Right 10
#define LineTeacking_Pin_Middle 4
#define LineTeacking_Pin_Left 2
#define LineTeacking_Read_Right !digitalRead(10) //Right
#define LineTeacking_Read_Middle !digitalRead(4) //Middle
#define LineTeacking_Read_Left !digitalRead(2) //Left
#define carSpeed 180 //PWM(Motor speed/Speed)
Servo servo; // Create a DC motor drive object
IRrecv irrecv(RECV_PIN); // Create an infrared receive drive object
decode_results results; // Create decoding object
unsigned long IR_PreMillis;
unsigned long LT_PreMillis;
int rightDistance = 0; //Right distance
int leftDistance = 0; //left Distance
int middleDistance = 0; //middle Distance
/*DIY_MotorControl: Motor Control Motor SpeedMotor DirectionMotor Time*/
uint8_t DIY_MotorSelection;
uint8_t DIY_MotorDirection;
uint16_t DIY_MotorSpeed;
unsigned long DIY_leftMotorControl_Millis;
unsigned long DIY_rightMotorControl_Millis;
/*DIY_CarControl: Car ControlCar moving directionCar SpeedCar moving time*/
uint8_t DIY_CarDirection;
uint8_t DIY_CarSpeed;
uint16_t DIY_CarTimer;
unsigned long DIY_CarControl_Millis;
uint8_t DIY_CarDirectionxxx;
uint8_t DIY_CarSpeedxxx;
uint16_t DIY_Distance;
String CommandSerialNumber; //
enum FUNCTIONMODE
{
IDLE, /*free*/
LineTeacking, /*Line Teacking Mode*/
ObstaclesAvoidance, /*Obstacles Avoidance Mode*/
Bluetooth, /*Bluetooth Control Mode*/
IRremote, /*Infrared Control Mode*/
DIY_MotorControl, /*Motor Control Mode*/
DIY_CarControl, /*Car Control Mode*/
DIY_CarControlxxx, /*Car Control Mode*/
DIY_ClearAllFunctions, /*Clear All Functions Mode*/
} func_mode = IDLE; /*Functional mode*/
enum MOTIONMODE
{
STOP, /*stop*/
FORWARD, /*forward*/
BACK, /*back*/
LEFT, /*left*/
RIGHT /*right*/
} mov_mode = STOP; /*move mode*/
void delays(unsigned long t)
{
for (unsigned long i = 0; i < t; i++)
{
// getBTData();
getBTData_Plus();//Bluetooth Communication Data Acquisition
getIRData(); //Infrared Communication Data Acquisition
delay(1);
}
}
/*
Acquisition Distance: Ultrasound
*/
unsigned int getDistance(void)
{ //Getting distance
static unsigned int tempda = 0;
unsigned int tempda_x = 0;
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
tempda_x = ((unsigned int)pulseIn(ECHO_PIN, HIGH) / 58);
if (tempda_x < 150)
{
tempda = tempda_x;
}
else
{
tempda = 30;
}
return tempda;
}
/*
Control motorCar movement forward
*/
void forward(bool debug, int16_t in_carSpeed)
{
analogWrite(ENA, in_carSpeed);
analogWrite(ENB, in_carSpeed);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
if (debug)
Serial.println("Go forward!");
}
/*
Control motorCar moving backwards
*/
void back(bool debug, int16_t in_carSpeed)
{
analogWrite(ENA, in_carSpeed);
analogWrite(ENB, in_carSpeed);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
if (debug)
Serial.println("Go back!");
}
/*
Control motorThe car turns left and moves forward
*/
void left(bool debug, int16_t in_carSpeed)
{
analogWrite(ENA, 250);
analogWrite(ENB, 250);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
if (debug)
Serial.println("Go left!");
}
/*
Control motorThe car turns right and moves forward
*/
void right(bool debug, int16_t in_carSpeed)
{
analogWrite(ENA, 250);
analogWrite(ENB, 250);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
if (debug)
Serial.println("Go right!");
}
/*
Stop motor controlTurn off the motor drive
*/
void stop(bool debug = false)
{
digitalWrite(ENA, LOW);
digitalWrite(ENB, LOW);
if (debug)
Serial.println("Stop!");
}
/*
Bluetooth serial port data acquisition and control command parsing
*/
void getBTData_Plus(void)
{
String comdata = "";
while ((Serial.available() > 0) && (false == comdata.endsWith("}")))
{
comdata += char(Serial.read());
delay(6);
}
if ((comdata.length() > 0) && (comdata != "") && (true == comdata.endsWith("}")))
{
//Serial.print(comdata);
//comdata = "{\"N\":\"2\",\"D1\":1}";
//{"N":2,"D1":1}
StaticJsonDocument<200> doc; //Create a JsonDocument object
DeserializationError error = deserializeJson(doc, comdata); //Deserialize JSON data
if (!error) //Check if deserialization is successful
{
int control_mode_N = doc["N"];
char buf[3];
uint8_t temp = doc["H"];
sprintf(buf, "%d", temp);
CommandSerialNumber = buf; //Get the serial number of the new command
switch (control_mode_N)
{
case 21: /*Ultrasonic module processing <commandN 21>*/
DIY_UltrasoundModuleStatus_Plus(doc["D1"]);
break;
case 22: /*Trace module data processing <commandN 22>*/
DIY_TraceModuleStatus_Plus(doc["D1"]);
break;
case 1: /*Motion module processing <commandN 1>*/
func_mode = DIY_MotorControl;
DIY_MotorSelection = doc["D1"];
DIY_MotorDirection = doc["D2"];
DIY_MotorSpeed = doc["D3"];
//Serial.print("{ok}");
Serial.print('{' + CommandSerialNumber + "_ok}");
break;
case 4: /*Motion module processing <commandN 4>*/
func_mode = DIY_CarControl;
DIY_CarDirection = doc["D1"];
DIY_CarSpeed = doc["D2"];
DIY_CarTimer = doc["T"];
DIY_CarControl_Millis = millis(); //Get the timestamp
//Serial.print("{ok}");
break;
case 40:
func_mode = DIY_CarControlxxx;
DIY_CarDirectionxxx = doc["D1"];
DIY_CarSpeedxxx = doc["D2"];
//Serial.print("{ok}");
Serial.print('{' + CommandSerialNumber + "_ok}");
break;
case 5: /*Clear mode processing <commandN 5>*/
func_mode = DIY_ClearAllFunctions;
//Serial.print("{ok}");
Serial.print('{' + CommandSerialNumber + "_ok}");
break;
case 3: /*Remote switching mode processing <commandN 3>*/
if (1 == doc["D1"]) // Line Teacking Mode
{
func_mode = LineTeacking;
//Serial.print("{ok}");
Serial.print('{' + CommandSerialNumber + "_ok}");
}
else if (2 == doc["D1"]) //Obstacles Avoidance Mode
{
func_mode = ObstaclesAvoidance;
//Serial.print("{ok}");
Serial.print('{' + CommandSerialNumber + "_ok}");
}
break;
case 2: /*Remote switching mode processing <commandN 2>*/
if (1 == doc["D1"])
{
func_mode = Bluetooth;
mov_mode = LEFT;
//Serial.print("{ok}");
Serial.print('{' + CommandSerialNumber + "_ok}");
}
else if (2 == doc["D1"])
{
func_mode = Bluetooth;
mov_mode = RIGHT;
//Serial.print("{ok}");
Serial.print('{' + CommandSerialNumber + "_ok}");
}
else if (3 == doc["D1"])
{
func_mode = Bluetooth;
mov_mode = FORWARD;
//Serial.print("{ok}");
Serial.print('{' + CommandSerialNumber + "_ok}");
}
else if (4 == doc["D1"])
{
func_mode = Bluetooth;
mov_mode = BACK;
//Serial.print("{ok}");
Serial.print('{' + CommandSerialNumber + "_ok}");
}
else if (5 == doc["D1"])
{
func_mode = Bluetooth;
mov_mode = STOP;
//Serial.print("{ok}");
Serial.print('{' + CommandSerialNumber + "_ok}");
}
break;
default:
break;
}
}
}
else if (comdata != "")
{
if (true == comdata.equals("f"))
{
func_mode = DIY_CarControlxxx;
DIY_CarDirectionxxx = 3;
DIY_CarSpeedxxx = 180;
}
else if (true == comdata.equals("b"))
{
func_mode = DIY_CarControlxxx;
DIY_CarDirectionxxx = 4;
DIY_CarSpeedxxx = 180;
}
else if (true == comdata.equals("l"))
{
func_mode = DIY_CarControlxxx;
DIY_CarDirectionxxx = 1;
DIY_CarSpeedxxx = 180;
}
else if (true == comdata.equals("r"))
{
func_mode = DIY_CarControlxxx;
DIY_CarDirectionxxx = 2;
DIY_CarSpeedxxx = 180;
}
else if (true == comdata.equals("s"))
{
func_mode = Bluetooth;
mov_mode = STOP;
}
else if (true == comdata.equals("1"))
{
func_mode = LineTeacking;
}
else if (true == comdata.equals("2"))
{
func_mode = ObstaclesAvoidance;
}
}
}
/*
Infrared Communication Data Acquisition
*/
void getIRData(void)
{
if (irrecv.decode(&results))
{
IR_PreMillis = millis();
switch (results.value)
{
case f:
func_mode = IRremote;
mov_mode = FORWARD;
break; /*forward*/
case b:
func_mode = IRremote;
mov_mode = BACK;
break; /*back*/
case l:
func_mode = IRremote;
mov_mode = LEFT;
break; /*left*/
case r:
func_mode = IRremote;
mov_mode = RIGHT;
break; /*right*/
case s:
func_mode = IRremote;
mov_mode = STOP;
break; /*stop*/
case KEY1:
func_mode = LineTeacking;
break; /*Line Teacking Mode*/
case KEY2:
func_mode = ObstaclesAvoidance;
break; /*Obstacles Avoidance Mode*/
default:
break;
}
irrecv.resume();
}
}
/*
Bluetooth remote control mode
*/
void bluetooth_mode()
{
if (func_mode == Bluetooth)
{
switch (mov_mode)
{
case FORWARD:
forward(false, carSpeed);
break;
case BACK:
back(false, carSpeed);
break;
case LEFT:
left(false, carSpeed);
break;
case RIGHT:
right(false, carSpeed);
break;
case STOP:
stop();
break;
default:
break;
}
}
}
/*
Infrared remote control mode
*/
void irremote_mode(void)
{
if (func_mode == IRremote)
{
switch (mov_mode)
{
case FORWARD:
forward(false, carSpeed);
break;
case BACK:
back(false, carSpeed);
break;
case LEFT:
left(false, carSpeed);
break;
case RIGHT:
right(false, carSpeed);
break;
case STOP:
stop();
break;
default:
break;
}
if (millis() - IR_PreMillis > 500)
{
mov_mode = STOP;
IR_PreMillis = millis();
}
}
}
/*
Line Teacking Mode
*/
void line_teacking_mode(void)
{
if (func_mode == LineTeacking)
{
if (LineTeacking_Read_Middle)
{ //Detecting in the middle infrared tube
forward(false, carSpeed); //Control motorthe car moving forward
LT_PreMillis = millis();
}
else if (LineTeacking_Read_Right)
{ //Detecting in the right infrared tube
right(false, carSpeed); //Control motorthe car moving right
while (LineTeacking_Read_Right)
{
getBTData_Plus();//Bluetooth data acquisition
//getBTData();
getIRData(); //Infrared data acquisition
}
LT_PreMillis = millis();
}
else if (LineTeacking_Read_Left)
{ //Detecting in the left infrared tube
left(false, carSpeed); //Control motorthe car moving left
while (LineTeacking_Read_Left)
{
getBTData_Plus();//Bluetooth data acquisition
//getBTData();
getIRData(); //Infrared data acquisition
}
LT_PreMillis = millis();
}
else
{
if (millis() - LT_PreMillis > 150)
{
stop(); //Stop motor controlTurn off motor drive mode
}
}
}
}
/*
Obstacles Avoidance Mode
*/
/*f(x) int */
static boolean function_xxx(long xd, long sd, long ed) //f(x)
{
if (sd <= xd && xd <= ed)
return true;
else
return false;
}
/*Obstacle avoidance*/
void obstacles_avoidance_mode(void)
{
static uint16_t ULTRASONIC_Get = 0;
static unsigned long ULTRASONIC_time = 0;
static boolean stateCar = false;
static boolean CarED = false;
static uint8_t switc_ctrl = 0x00;
static boolean timestamp = true;
if (func_mode == ObstaclesAvoidance)
{
servo.attach(3);
if (millis() - ULTRASONIC_time > 100)
{
ULTRASONIC_Get = getDistance(); //Measuring obstacle distance
ULTRASONIC_time = millis();
if (function_xxx(ULTRASONIC_Get, 0, 25)) //If the distance is less than Xcm obstacles
{
stateCar = true;
stop(); //stop
}
else
{
stateCar = false;
}
}
if (false == CarED)
{
if (stateCar == true)
{
timestamp = true;
CarED = true;
switc_ctrl = 0x00;
stop(); //stop
servo.write(30); //sets the servo position according to the value
delays(500);
if (function_xxx(getDistance(), 0, 25)) //How many cm in the front have obstacles?
{
switc_ctrl |= 0x01;
//goto
}
else
{
switc_ctrl &= (~0x01);
}
servo.write(150); //sets the servo position according to the value
delays(500);
if (function_xxx(getDistance(), 0, 25)) //How many cm in the front have obstacles?
{
switc_ctrl |= 0x02;
//goto
}
else
{
switc_ctrl &= (~0x02);
}
servo.write(90); //tell servo to go to position in variable 30
delays(500);
if (function_xxx(getDistance(), 0, 25)) //How many cm in the front have obstacles?
{
switc_ctrl |= 0x04;
//goto
}
else
{
switc_ctrl &= (~0x04);
}
}
else
{
forward(false, 180); //Control motorthe car moving forwar
CarED = false;
}
}
if (true == CarED)
{
// Get cpu time
static unsigned long MotorRL_time;
if (timestamp == true || millis() - MotorRL_time > 420)
{
timestamp = false;
MotorRL_time = millis();
}
if (function_xxx((millis() - MotorRL_time), 0, 400))
{
switch (switc_ctrl)
{
case 0 ... 1:
left(false, 150); //Control motorThe car moves forward and left
break;
case 2:
right(false, 150); //Control motorThe car moves forward and right
break;
case 3:
forward(false, 150); //Control motorthe car moving forwar
break;
case 4 ... 5:
left(false, 150); //Control motorThe car moves forward and left
break;
case 6:
right(false, 100); //Control motorThe car moves forward and right
break;
case 7:
back(false, 150); //Control motorCar backwards
break;
}
}
else
{
CarED = false;
}
}
}
else
{
servo.detach();
ULTRASONIC_Get = 0;
ULTRASONIC_time = 0;
}
}
/*****************************************************Begin@DIY**************************************************************************************/
/*
N21:command
DIY modeUltrasonic moduleApp controls module status, module sends data to app
*/
void DIY_UltrasoundModuleStatus_Plus(uint8_t is_get) //Ultrasonic module processing
{
//uint16_t DIY_Distance = getDistance(); //Ultrasonic module measuring distance
if (1 == is_get) // is_get Start trueObstacles / false:No obstacles
{
if (DIY_Distance <= 40)
{
// Serial.print("{true}");
Serial.print('{' + CommandSerialNumber + "_true}");
}
else
{
//Serial.print("{false}");
Serial.print('{' + CommandSerialNumber + "_false}");
}
}
else if (2 == is_get) //Ultrasonic is_get data
{
char toString[10];
sprintf(toString, "%d", DIY_Distance);
// Serial.print(toString);
Serial.print('{' + CommandSerialNumber + '_' + toString + '}');
}
}
/*
N22:command
DIY modeTeacking moduleApp controls module status, module sends data to app
*/
void DIY_TraceModuleStatus_Plus(uint8_t is_get) //Tracking module processing
{
if (0 == is_get) /*Get traces on the left*/
{
if (LineTeacking_Read_Left)
{
//Serial.print("{true}");
Serial.print('{' + CommandSerialNumber + "_true}");
}
else
{
//Serial.print("{false}");
Serial.print('{' + CommandSerialNumber + "_false}");
}
}
else if (1 == is_get) /*Get traces on the middle*/
{
if (LineTeacking_Read_Middle)
{
//Serial.print("{true}");
Serial.print('{' + CommandSerialNumber + "_true}");
}
else
{
//Serial.print("{false}");
Serial.print('{' + CommandSerialNumber + "_false}");
}
}
else if (2 == is_get)
{ /*Get traces on the right*/
if (LineTeacking_Read_Right)
{
//Serial.print("{true}");
Serial.print('{' + CommandSerialNumber + "_true}");
}
else
{
//Serial.print("{false}");
Serial.print('{' + CommandSerialNumber + "_false}");
}
}
}
/*
N1:command
DIY modeSport mode <motor control> Control motor by app
Inputuint8_t is_MotorSelection, Motor selection 1left 2right 0all
uint8_t is_MotorDirection, Motor steering 1Forward 2Reverse 0stop
uint8_t is_MotorSpeed, Motor speed 0-250
*/
void DIY_MotorControl_Plus(uint8_t is_MotorSelection, uint8_t is_MotorDirection, uint8_t is_MotorSpeed)
{
static boolean MotorControl = false;
if (func_mode == DIY_MotorControl) //Motor control mode
{
MotorControl = true;
if (is_MotorSelection == 1 || is_MotorSelection == 0) //Left motor
{
if (is_MotorDirection == 1) //Positive rotation
{
analogWrite(ENA, is_MotorSpeed);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
}
else if (is_MotorDirection == 2) //Reverse
{
analogWrite(ENA, is_MotorSpeed);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
}
else if (is_MotorDirection == 0)
{
digitalWrite(ENA, LOW); //Turn off the motor enable pin
}
}
if (is_MotorSelection == 2 || is_MotorSelection == 0) //Right motor
{
if (is_MotorDirection == 1) //Positive rotation
{
analogWrite(ENB, is_MotorSpeed);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
else if (is_MotorDirection == 2) //Reverse
{
analogWrite(ENB, is_MotorSpeed);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
else if (is_MotorDirection == 0)
{
digitalWrite(ENB, LOW); //Turn off the motor enable pin
}
}
}
else
{
if (MotorControl == true)
{
MotorControl = false;
digitalWrite(ENA, LOW); //Turn off the motor enable pin
digitalWrite(ENB, LOW);
}
}
}
/*
N4command
DIY mode<Car control> APP control car
Time limited
*/
void DIY_CarControl_Plus(uint8_t is_CarDirection, uint8_t is_CarSpeed, uint8_t is_Timer)
{
static boolean CarControl = false;
static boolean CarControl_TE = false; //Have time to spend
static boolean CarControl_return = false;
if (func_mode == DIY_CarControl) //Car Control Mode
{
CarControl = true;
if (is_Timer != 0) //Setting time cannot be empty
{
if ((millis() - DIY_CarControl_Millis) > (is_Timer * 1000)) //check the time
{
CarControl_TE = true;
digitalWrite(ENA, LOW); //Turn off the motor enable pin
digitalWrite(ENB, LOW);
if (CarControl_return == false)
{
Serial.print('{' + CommandSerialNumber + "_ok}");
CarControl_return = true;
}
}
else
{
CarControl_TE = false; //Have time to spend
CarControl_return = false;
}
}
if (CarControl_TE == false)
{
switch (is_CarDirection)
{
case 1: /*Left-Forward Motion Mode*/
left(false, is_CarSpeed);
break;
case 2: /*Right-Forward Motion Mode*/
right(false, is_CarSpeed);
break;
case 3: /*Sport mode forward*/
forward(false, is_CarSpeed);
break;
case 4: /*Sport mode back*/
back(false, is_CarSpeed);
break;
default:
break;
}
}
}
else
{
if (CarControl == true)
{
CarControl_return = false;
CarControl = false;
digitalWrite(ENA, LOW); //Turn off the motor enable pin
digitalWrite(ENB, LOW);
DIY_CarControl_Millis = 0;
}
}
}
/*
N40command
DIY mode<Car control> APP control car
No time limit
*/
void DIY_CarControl_Plusxxx(uint8_t is_CarDirection, uint8_t is_CarSpeed)
{
static boolean CarControl = false;
if (func_mode == DIY_CarControlxxx) //Car Control Mode
{
CarControl = true;
switch (is_CarDirection)
{
case 1: /*Left-Forward Motion Mode*/
left(false, is_CarSpeed);
break;
case 2: /*Right-Forward Motion Mode*/
right(false, is_CarSpeed);
break;
case 3: /*Sport mode forward*/
forward(false, is_CarSpeed);
break;
case 4: /*Sport mode back*/
back(false, is_CarSpeed);
break;
default:
break;
}
}
else
{
if (CarControl == true)
{
CarControl = false;
digitalWrite(ENA, LOW); //Turn off the motor enable pin
digitalWrite(ENB, LOW);
}
}
}
/*
N5:command
DIY modeClear all features
*/
void DIY_ClearAllFunctionsXXX(void)
{
if (func_mode == DIY_ClearAllFunctions)
{
mov_mode = STOP;
func_mode = IDLE;
digitalWrite(ENA, LOW); //Turn off the motor enable pin
digitalWrite(ENB, LOW);
/*DIY_MotorControl:Motor Control Motor SpeedMotor DirectionMotor Time*/
DIY_MotorSelection = NULL;
DIY_MotorDirection = NULL;
DIY_MotorSpeed = NULL;
DIY_leftMotorControl_Millis = NULL;
DIY_rightMotorControl_Millis = NULL;
/*DIY_CarControl:Car ControlCar moving directionCar SpeedCar moving time*/
DIY_CarDirection = NULL;
DIY_CarSpeed = NULL;
DIY_CarTimer = NULL;
DIY_CarControl_Millis = NULL;
}
}
void getDistance_xx(void)
{
DIY_Distance = getDistance(); //Ultrasonic measurement distance
}
/*****************************************************End@DIY**************************************************************************************/
void setup(void)
{
Serial.begin(9600); //initialization
servo.attach(3, 500, 2400); //500: 0 degree 2400: 180 degree
servo.write(90); //sets the servo position according to the 90middle
irrecv.enableIRIn(); //Enable infrared communication NEC
pinMode(ECHO_PIN, INPUT); //Ultrasonic module initialization
pinMode(TRIG_PIN, OUTPUT);
pinMode(IN1, OUTPUT); //Motor-driven port configuration
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(LineTeacking_Pin_Right, INPUT); //Infrared tracking module port configuration
pinMode(LineTeacking_Pin_Middle, INPUT);
pinMode(LineTeacking_Pin_Left, INPUT);
}
void loop(void)
{
DIY_Distance = getDistance(); //Ultrasonic measurement distance
getBTData_Plus(); //Bluetooth data acquisition
getIRData(); //Infrared data acquisition
bluetooth_mode(); //Bluetooth remote mode
irremote_mode(); //Infrared NEC remote control mode
line_teacking_mode(); //Line Teacking Mode
obstacles_avoidance_mode(); //Obstacles Avoidance Mode
/*DIY_MotorControl: Motor Control Motor SpeedMotor DirectionMotor Time*/
DIY_MotorControl_Plus(DIY_MotorSelection, DIY_MotorDirection, DIY_MotorSpeed); //Control motor steering
/* DIY mode<Car control> APP control car*/
DIY_CarControl_Plus(DIY_CarDirection, DIY_CarSpeed, DIY_CarTimer); //Control the direction of the car<Time limited>
DIY_CarControl_Plusxxx(DIY_CarDirectionxxx, DIY_CarSpeedxxx); //Control the direction of the car<No Time limited>
DIY_ClearAllFunctionsXXX();
}
Comments