

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
For my latest project, I built a radar system using an Arduino UNO, a servo motor, and an ultrasonic sensor to detect objects in the surroundings. Inspired by real-world radar technology, this project mimics how radar scans an area to find obstacles or targets.
The ultrasonic sensor sends out sound waves and measures the time it takes for the echo to bounce back from nearby objects. The servo motor sweeps the sensor across a range of angles, allowing the system to scan an area instead of just one direction. With this setup, I can detect objects in a 15 to 165 degree sweep with precise distance measurements and this distance can be setup using the code.
Whenever an object comes within range, the radar calculates the distance and displays it in the serial monitor, effectively acting like a miniature scanning radar system and the LED glows BLUE as soon as a object is detected. Few improvements are possible like addition of LCD and a buzzer but I think its ok as a beginner.
This project combines electronics, programming, and mechanical movement to create a functional and interactive radar — perfect for beginners and hobbyists interested in robotics and sensing technologies. For me its something related to defense tech so I built it.
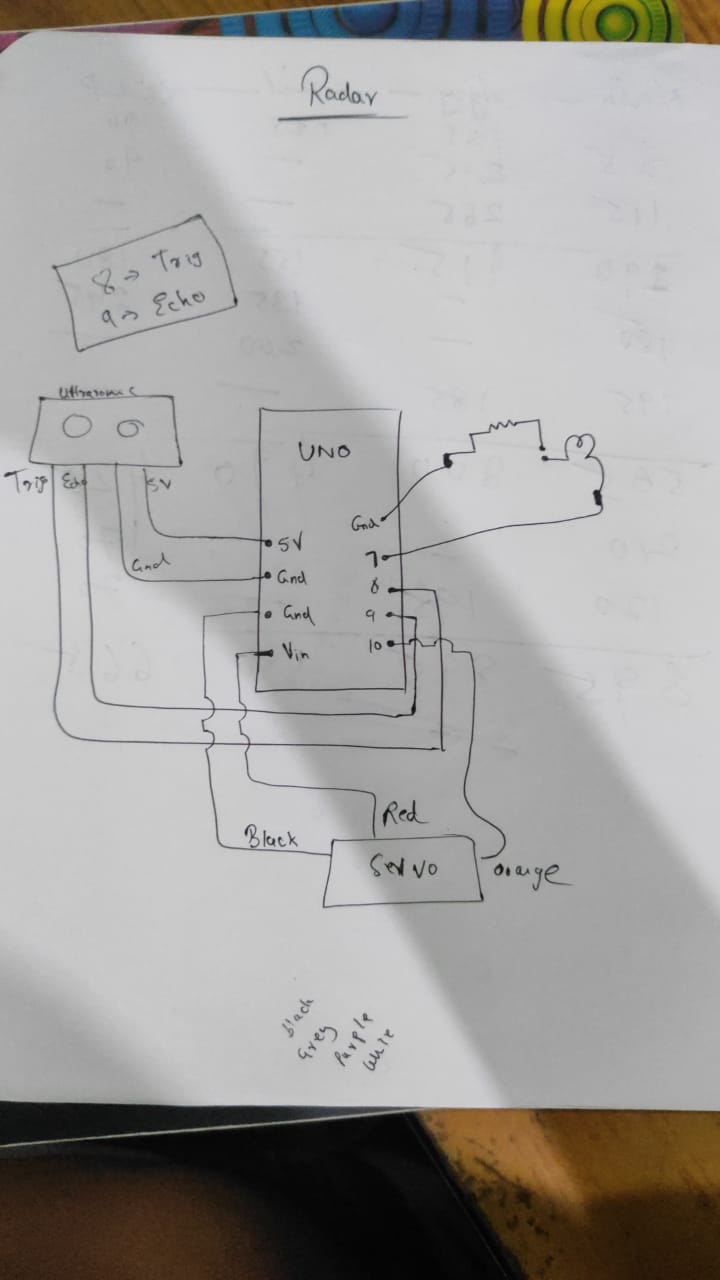
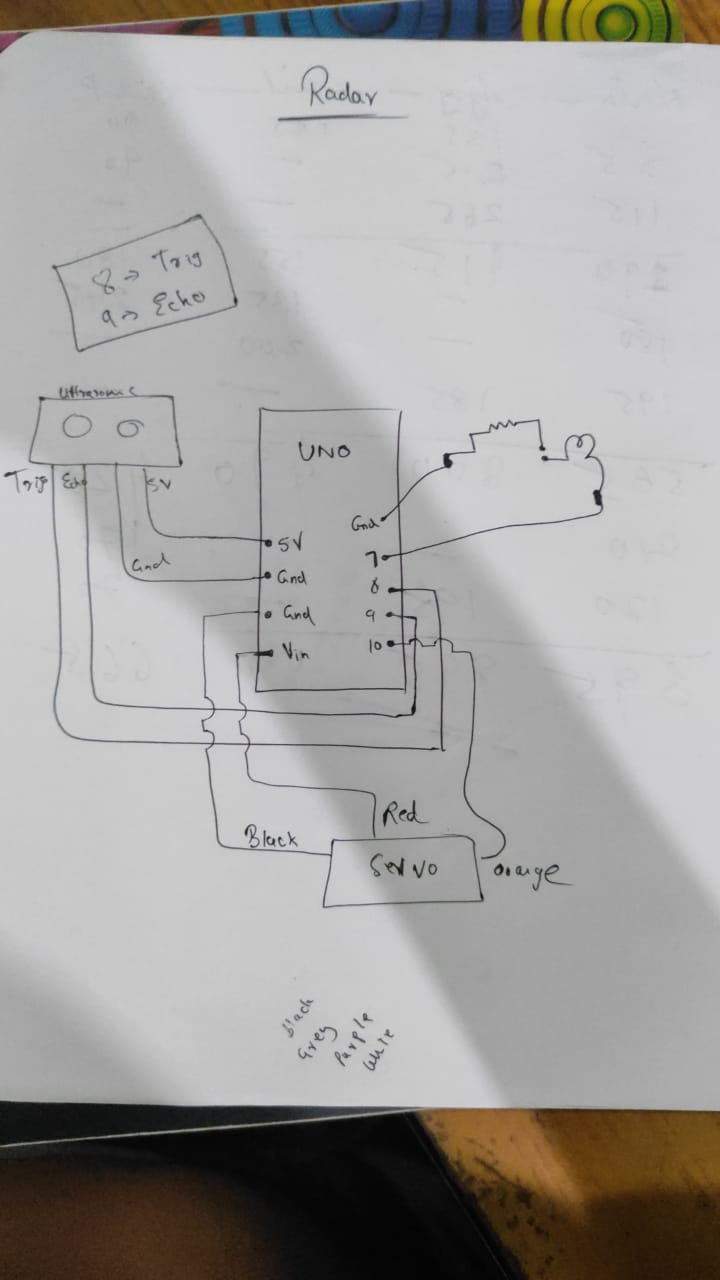
Circuit Diagram
The trig and echo pins of the HC-SR04 are connected to D8 and D9 of the Arduino.
The servo signal pin is connected to D10.
The LED is connected to D7 and glows when an object is detected within the set range.
All components share a common ground (GND).
Powered via USB or external 5V supply





{kind=link}
Comments